
Python下opencv使用筆記(十一)(詳解hough變換檢測直線與圓)
在數字影象中,往往存在著一些特殊形狀的幾何圖形,像檢測馬路邊一條直線,檢測人眼的圓形等等,有時我們需要把這些特定圖形檢測出來,hough變換就是這樣一種檢測的工具。
Hough變換的原理是將特定圖形上的點變換到一組引數空間上,根據引數空間點的累計結果找到一個極大值對應的解,那麼這個解就對應著要尋找的幾何形狀的引數(比如說直線,那麼就會得到直線的斜率k與常熟b,圓就會得到圓心與半徑等等)。
關於hough變換,核心以及難點就是關於就是有原始空間到引數空間的變換上。以直線檢測為例,假設有一條直線L,原點到該直線的垂直距離為p,垂線與x軸夾角為
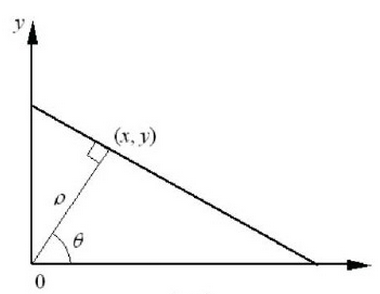
可以看到的是這條直線在極座標系下只有一個
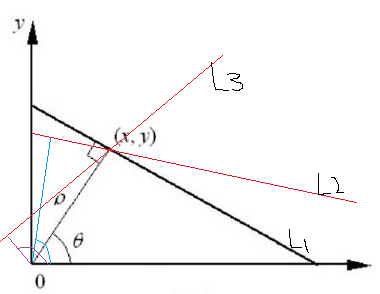
可以看到,光是空間上的一個點在極座標系下就可能在很多極座標對所對應的直線上,具體有多少個極座標對呢?那得看你的
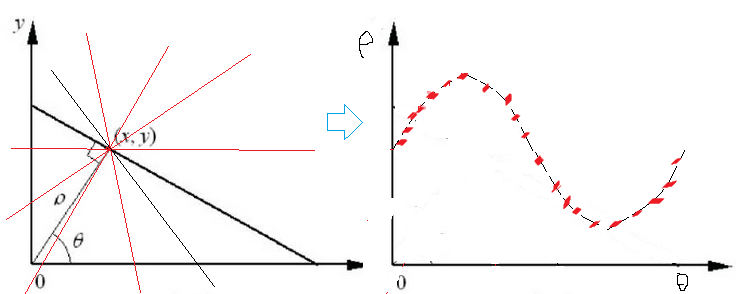
ok前面說的是單單這一個點對應的極座標系下的引數對,那麼如果每個點都這麼找一圈呢?也就是每個點在引數空間上都對應一系列引數對吧,現在把它們華仔同一個座標系下會怎麼樣呢?為了方便,假設在這個直線上取3個點畫一下:
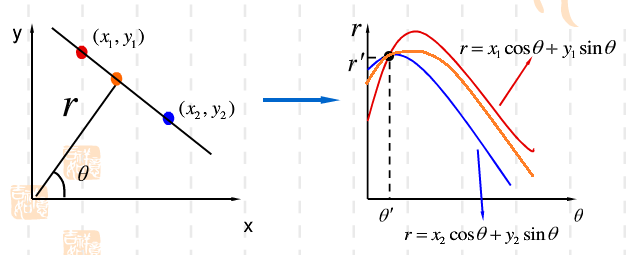
那麼可以看到,首先對於每一個點,在極座標下,會存在一個週期的曲線來表示通過這個點,其次,這三個極座標曲線同時經過一個點,要搞清楚的是,極座標上每一個點對
再來分析這個演算法。可以看到hough變換就是引數對映變換。對每一個點都進行對映,並且每一個對映還不止一次,
繼續演算法,分析這麼多,可想而知那麼一個hough變換在演算法設計上就可以如下步驟:
(1)將引數空間
(2)然後對影象邊界上的每一個點進行變換,變換到屬於哪一組
(3)當所有點處理完成後,就來分析得到的
(4)有了
說了這麼多,這就是原理上hough變換的最底層原理,事實上完全可以自己寫程式去實現這些,然而,也說過,hough變換是一個耗時耗力的演算法,自己寫迴圈實現通常很慢,曾經用matlab寫過這個,也有實際的hough變換例子可以看看:
那麼我們在實際中大可不必自己寫,opencv已經集成了hough變換的函式,呼叫它的函式效率高,也很簡單。
Opencv中檢測直線的函式有cv2.HoughLines(),cv2.HoughLinesP()
函式cv2.HoughLines()返回值有三個(opencv 3.0),實際是個二維矩陣,表述的就是上述的
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('line.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度影象
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLines(edges,1,np.pi/180,160)
lines1 = lines[:,0,:]#提取為為二維
for rho,theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])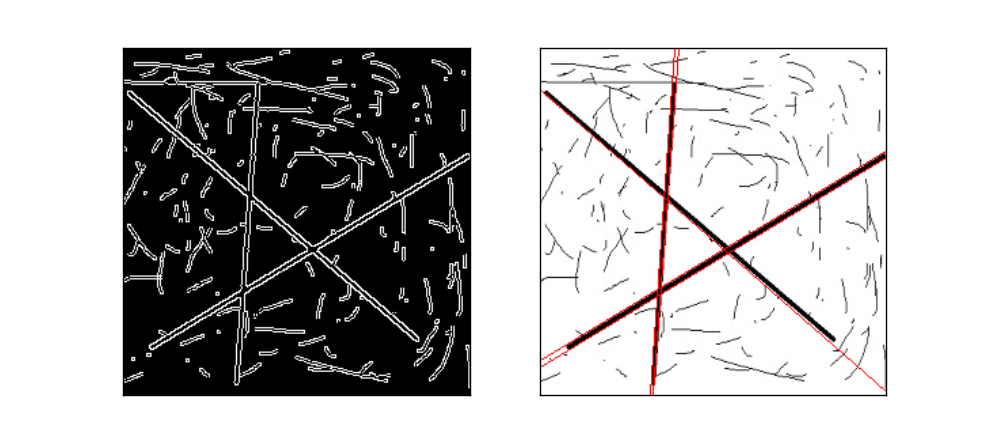
測試一個新的圖,不停的改變 cv2.HoughLines最後一個閾值引數到合理的時候如下:
可以看到檢測的還可以的。
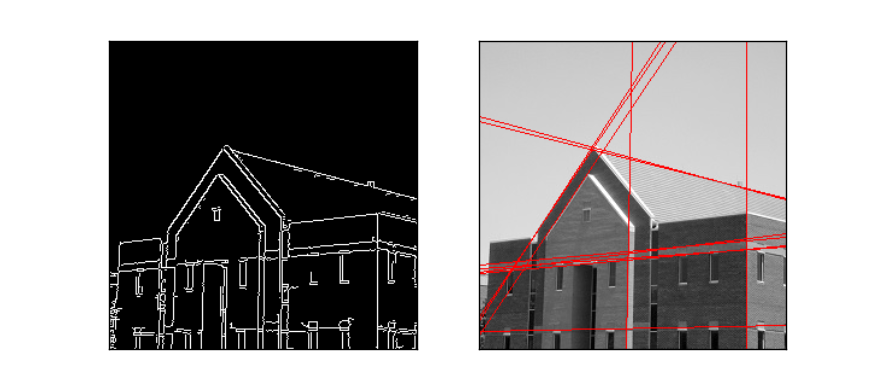
函式cv2.HoughLinesP()是一種概率直線檢測,我們知道,原理上講hough變換是一個耗時耗力的演算法,尤其是每一個點計算,即使經過了canny轉換了有的時候點的個數依然是龐大的,這個時候我們採取一種概率挑選機制,不是所有的點都計算,而是隨機的選取一些個點來計算,相當於降取樣了。這樣的話我們的閾值設定上也要降低一些。在引數輸入輸出上,輸入不過多了兩個引數:minLineLengh(線的最短長度,比這個短的都被忽略)和MaxLineCap(兩條直線之間的最大間隔,小於此值,認為是一條直線)。輸出上也變了,不再是直線引數的,這個函式輸出的直接就是直線點的座標位置,這樣可以省去一系列for迴圈中的由引數空間到影象的實際座標點的轉換。
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('room.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度影象
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLinesP(edges,1,np.pi/180,30,minLineLength=60,maxLineGap=10)
lines1 = lines[:,0,:]#提取為二維
for x1,y1,x2,y2 in lines1[:]:
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])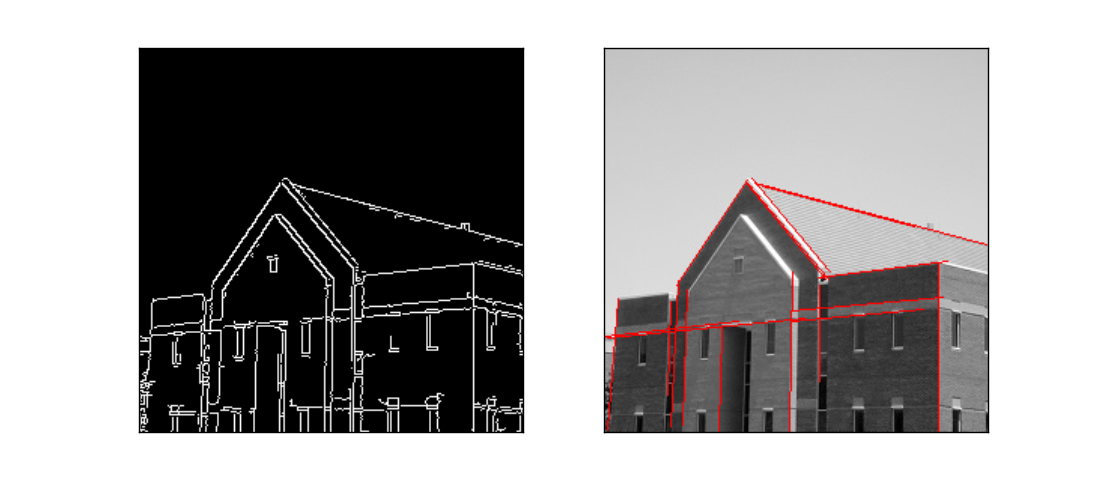
可以看到這個方法似乎更好些,速度還快,調引數得到較好的效果就ok了。
Ok說完了直線的檢測,再來說說圓環的檢測,我們知道圓的數學表示為:
從而一個圓的確定需要三個引數,那麼就需要三層迴圈來實現(比直線的多一層),從容把影象上的所有點對映到三維引數空間上。其他的就一樣了,尋找引數空間累加器的最大(或者大於某一閾值)的值。那麼理論上圓的檢測將比直線更耗時,然而opencv對其進行了優化,用了一種霍夫梯度法,感興趣去研究吧,我們只要知道它能優化演算法的效率就可以了。關於函式引數輸入輸出:
cv2.HoughCircles(image, method, dp, minDist, circles, param1, param2, minRadius, maxRadius)
這個時候輸入為灰度影象,同時最好規定檢測的圓的最大最小半徑,不能盲目的檢測,否側浪費時間空間。輸出就是三個引數空間矩陣。
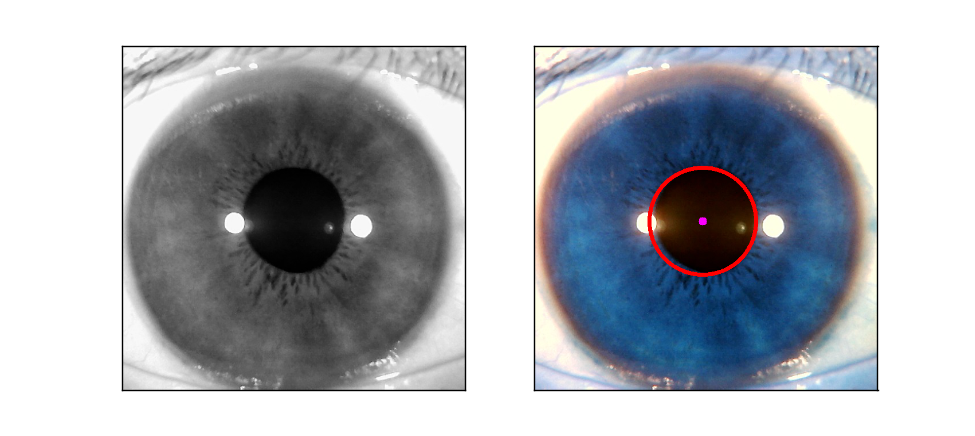
來個實際點的人眼影象,把minRadius和maxRadius調到大圓範圍檢測如下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('eye.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度影象
plt.subplot(121),plt.imshow(gray,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
circles1 = cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,1,
100,param1=100,param2=30,minRadius=200,maxRadius=300)
circles = circles1[0,:,:]#提取為二維
circles = np.uint16(np.around(circles))#四捨五入,取整
for i in circles[:]:
cv2.circle(img,(i[0],i[1]),i[2],(255,0,0),5)#畫圓
cv2.circle(img,(i[0],i[1]),2,(255,0,255),10)#畫圓心
plt.subplot(122),plt.imshow(img)
plt.xticks([]),plt.yticks([])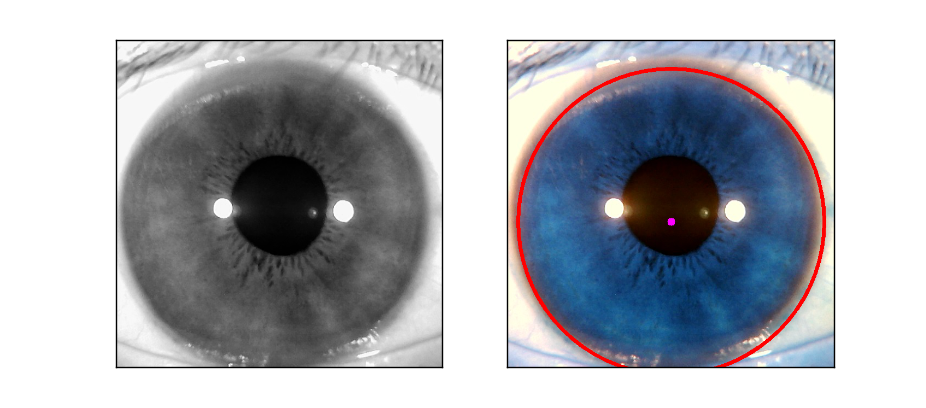
把半徑範圍調小點,檢測內圓:
至此圓的檢測就是這樣。