
鐳射slam Gmapping安裝與測試
阿新 • • 發佈:2019-01-08
slam_gmapping安裝與測試
既然想做一個小車,就乾脆把小車做的有趣一點,小車現在已經可以接受鍵盤的控制實現行走了,下一步就是給它加一個新功能,比如利用鐳射slam實現定位與導航。
安裝
1.直接通過命令安裝(前提是安裝好了ros kinetic環境)
sudo apt-get install ros-kinetic-slam-gmapping
2.下載用於測試的資料包,這裡直接通過網盤下載,因為原連結已經失效
測試
1.執行roscore
roscore
2.新開終端,設定引數,確保在任何節點使用前設定use_sim_time引數為true
rosparam set use_sim_time true
3.新開終端,執行slam_gmapping節點,它將在base_scan主題上收聽鐳射掃描資料
rosrun gmapping slam_gmapping scan:=base_scan
4.新開終端,進入下載的資料的位置,並play,例如我的就是basic_localization_stage_indexed.bag,把它改成你下載的資料的名字,它的作用是把鐳射資料傳送給slam_gmapping節點。
rosbag play --clock basic_localization_stage_indexed. 
5.利用ros的rviz工具可以看到你建立的地圖,新開終端,開啟rviz。
rviz rviz
點選add,讓其topic為/map,即可看到建立的2D地圖。

6.建立的地圖。
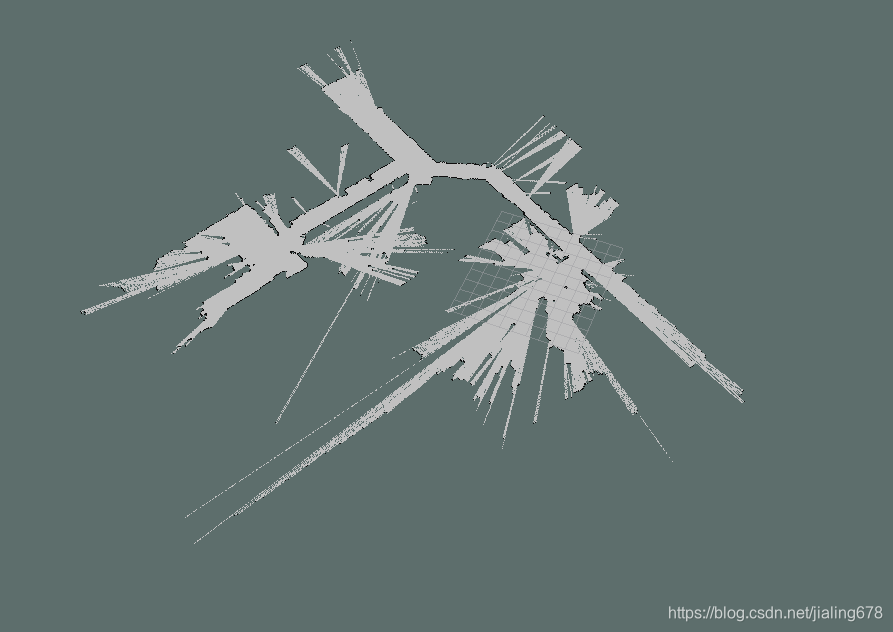
我們已經成功安裝了Gmapping,下一步會介紹如何使用鐳射感測器,而不是測試資料來實現建圖過程。最終實現讓ros小車搭載鐳射感測器自主建圖與定位,在這個過程中,我們將會逐漸瞭解ros機器人系統的工作原理與使用方式,同時學習Gmapping的數學原理。