
計算機視覺----立體匹配
立體匹配核心步驟:
本文圍繞如何在兩張影象上找到對應點,不涉及三維重建;
分為兩部分:對應點匹配三種方法和利用匹配點獲取深度資訊(視差圖)的原理解釋
一、如何在兩張圖片找到對應點?(有了極線約束,不需要全平面的尋找匹配點!)
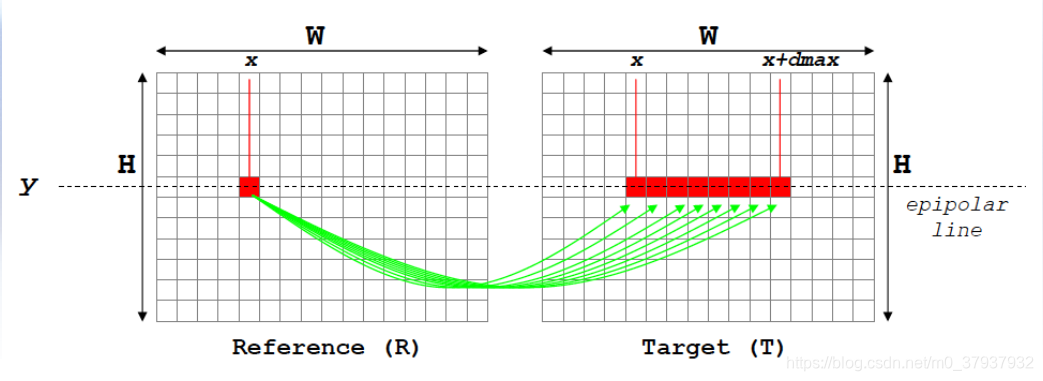
極線約束:
極線約束就是說同一個點在兩幅影象上的對映,已知左圖對映點p1,那麼右圖對映點p2
定在相對於p1的極線上。
三種尺度的匹配方式:
1.逐畫素的匹配(找另一影象級線上最相似的畫素值):
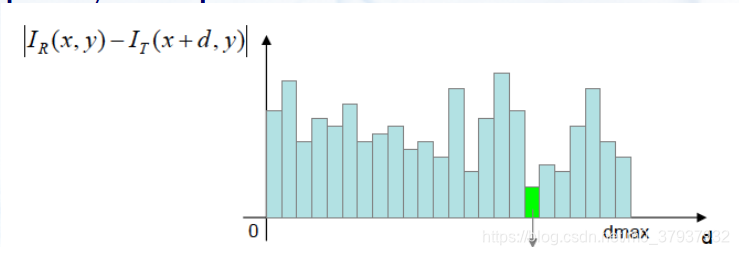
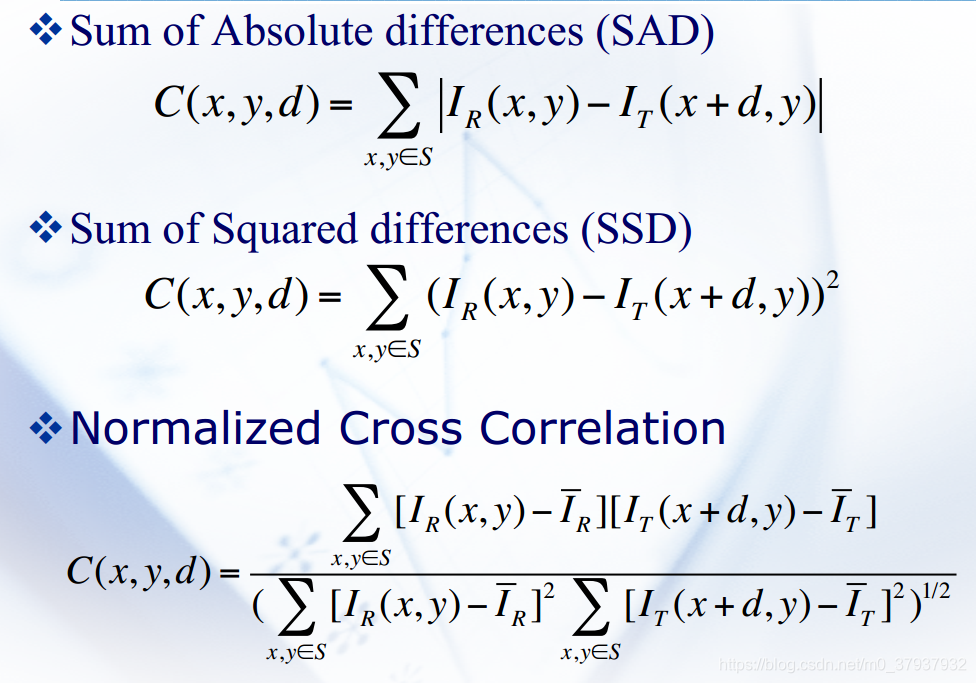
2.基於window 匹配(求window的cost):
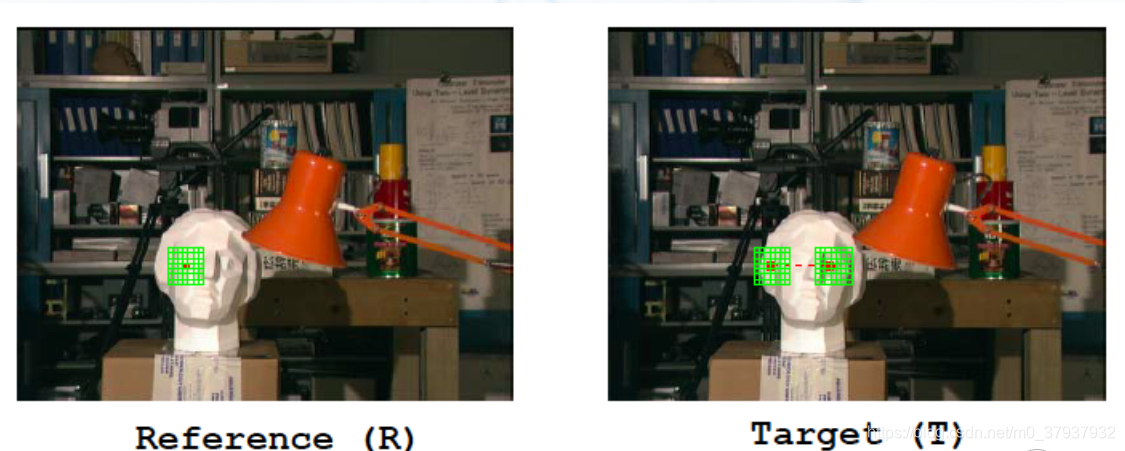
關於計算window的代價函式如下圖所示:
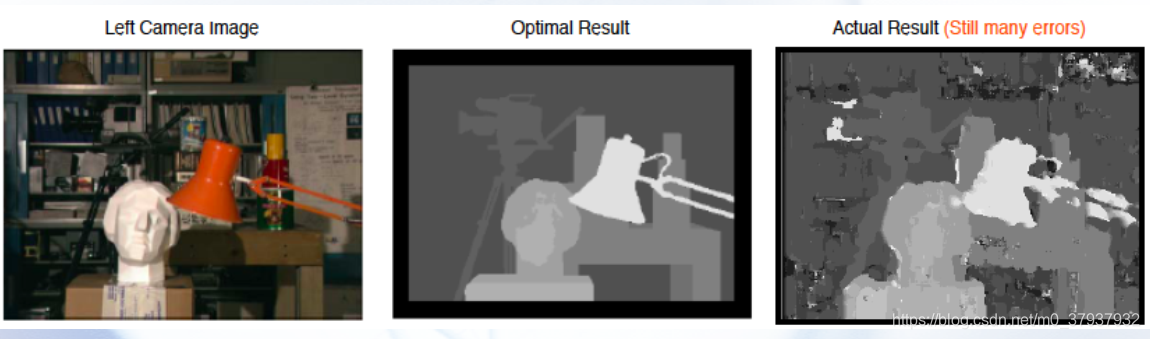
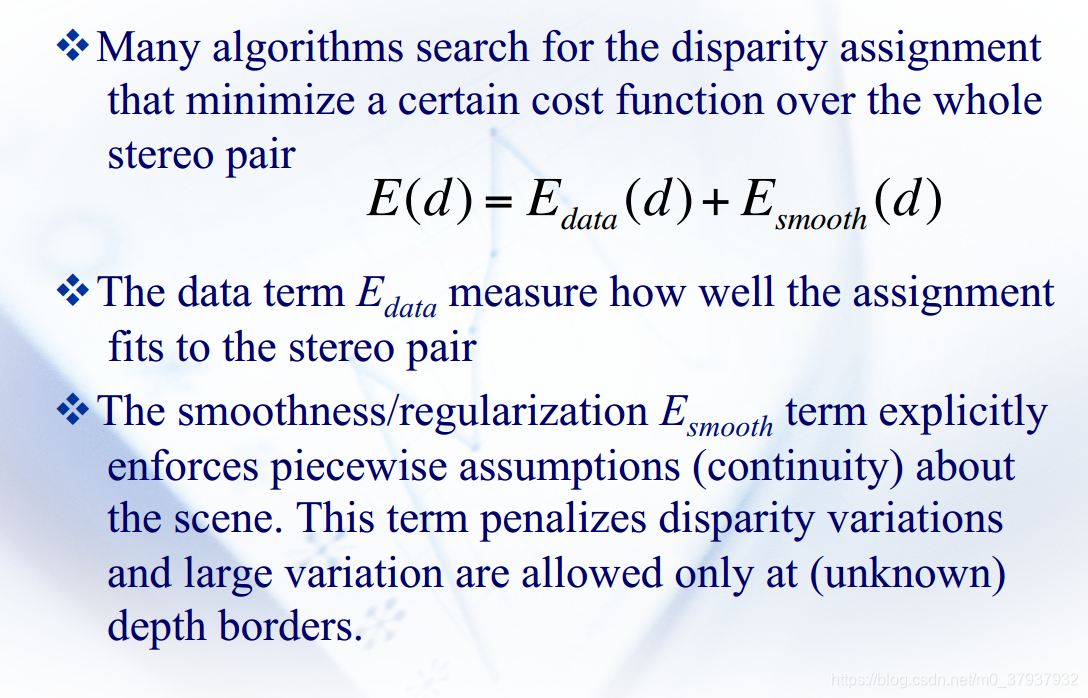
3.global 匹配(為了減小噪聲)
從下圖可以看出視差圖還是有很多的error,所以進一步提出global,考慮平滑。
最小化損失函式
二、找到對應點我們能做些什麼?(當然是獲取場景的深度資訊,下面提出瞭如何表達深度資訊)
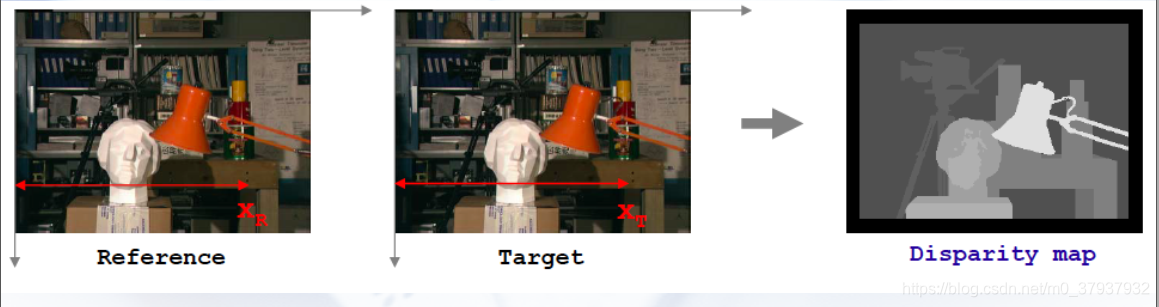
視差:兩個對應點x軸的差。
視差圖:每個畫素值由兩個影象上對應點的距離差值*某個特定的值。(物體越近,視差越大,因而繪製呈現為白色,越遠視差越小,呈現為黑色),正如下圖的視差圖表示出了場景的深度資訊。
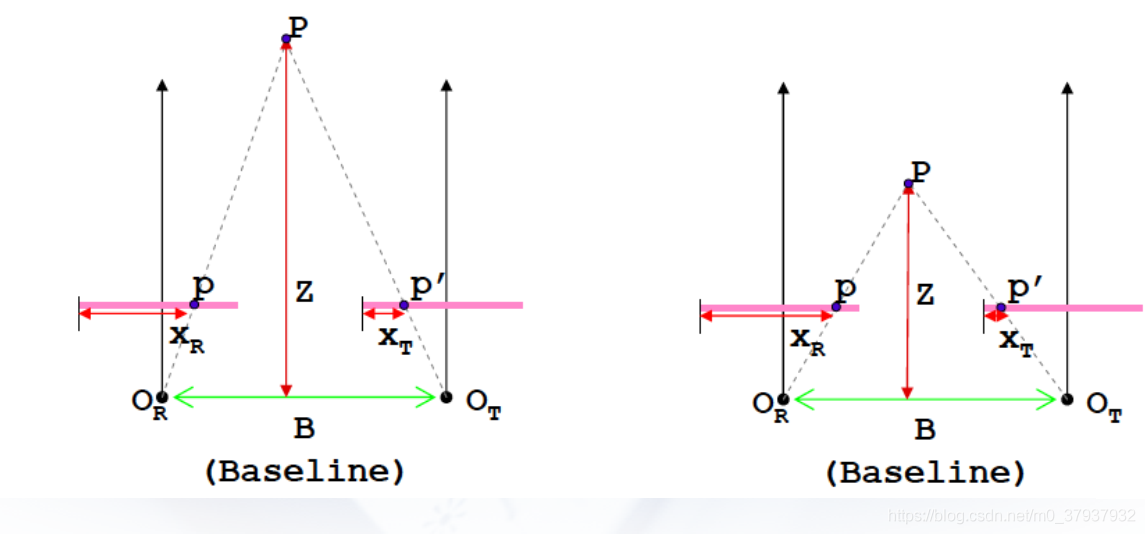
找到對應點後,根據視差求深度。
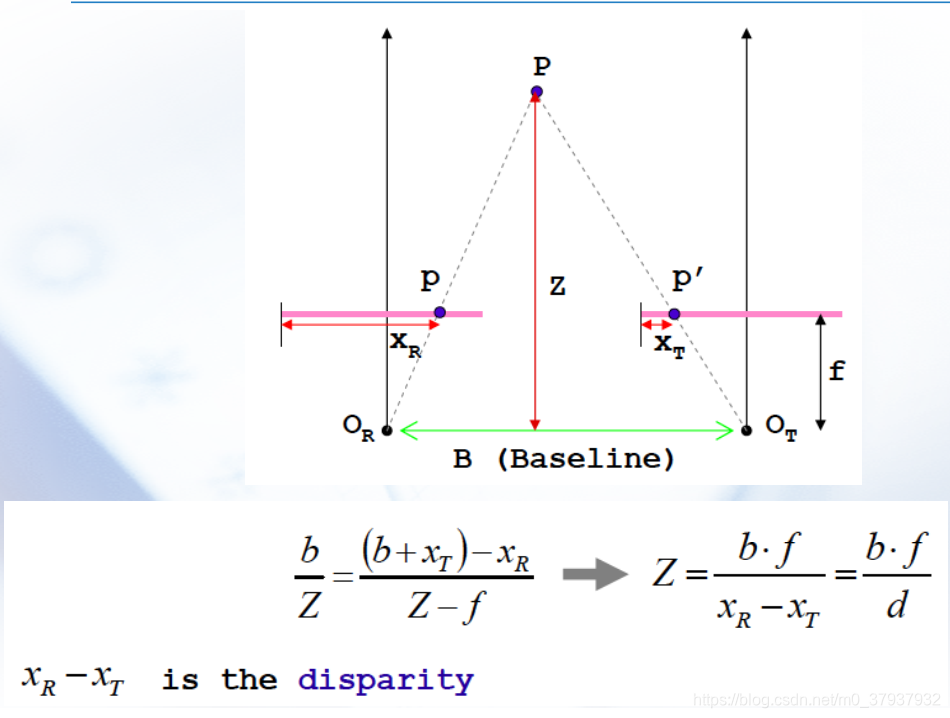
下圖解釋了物體距離攝像頭越近,視差越大。(為什麼視差圖可以表達深度)
相關推薦
計算機視覺----立體匹配
立體匹配核心步驟: 本文圍繞如何在兩張影象上找到對應點,不涉及三維重建; 分為兩部分:對應點匹配三種方法和利用匹配點獲取深度資訊(視差圖)的原理解釋 一、如何在兩張圖片找到對應點?(有了極線約束,不需要全平面的尋找匹配點!) 極線約束: 極線約束就是說同一個點在兩幅影象上的對映,已知左圖對
雙目視覺---立體匹配介紹
原文:http://blog.csdn.net/mysniper11/article/details/8618245 一、概念 立體匹配演算法主要是通過建立一個能量代價函式,通過此能量代價函式最小化來估計畫素點視差值。立體匹配演算法的實質就是一個最優化
雙目立體視覺中的座標系與轉換關係 [留意~攝影測量學與計算機視覺學科中的差異]
文章目錄 前言 影像座標系 相機座標系 世界座標系 影像座標系與相機座標系之間的相互轉換 相機座標系與世界座標系之間的相互轉換 前言 通過模擬人眼立體視覺,兩個攝像機拍攝
立體視覺-opencv中立體匹配相關程式碼 三種匹配演算法比較
BM 演算法: 該演算法程式碼: CvStereoBMState *BMState = cvCreateStereoBMState(); int SADWindowSize=15; BMState->SADW
【視覺-立體視覺】全域性匹配演算法SGBM實現(含動態規劃DP)詳解
最近一直在學習SGBM演算法,作為一種全域性匹配演算法,立體匹配的效果明顯好於區域性匹配演算法,但是同時複雜度上也要遠遠大於區域性匹配演算法。演算法主要是參考Stereo Processing by Semiglobal Matching and Mutual Informa
【視覺-立體視覺】立體匹配幾種演算法效能比較
OpenCV三種立體匹配求視差圖演算法總結 對OpenCV中涉及的三種立體匹配演算法進行程式碼及各自優缺點總結: 首先我們看一下BM演算法: 該演算法程式碼: CvStereoBMState *BMState = cvCreateStereoBMSta
VS2017+OpenCV3.3基於SGBM演算法的雙目立體視覺、雙目測距(雙目校正和立體匹配)
前些日子做了一個關於雙目立體視覺的入門作業,現在在這裡總結一下學到的一些知識(寫的可能會有很多欠缺的地方,還望海涵!) 本篇部落格不涉及雙目標定的知識,關於雙目標定網上資料很多,大家可以自行查詢學習。 先說一下本部落格的雙目立體視覺的實現基礎,已知以下資訊:
立體視覺--stereo correspondence(雙目立體匹配)
立體視覺的匹配演算法有: (1) Marr-Poggio-Grimson演算法,以過零點為基元,採用由粗到精的控制策略,用精度較低層次的匹配來限定精度較高層次匹配的搜尋空間,最後利用連續性約束通過迭代方式實現匹配過程。處理物件是自然景物的雙目立體圖象。(2) R. Nevatia-G.Medion
『python』OpenCV3計算機視覺庫安裝
targe cond 最新 cnblogs enc 2.0 sent lan oca 1.下載OpenCV: https://codeload.github.com/Itseez/opencv/zip/3.0.0 2.解壓下載相關依賴: sudo apt-get inst
常用牛人主頁鏈接(計算機視覺、模式識別、機器學習相關方向,陸續更新。。。。)【轉】
short psu works charles 貝葉斯 learning 數學 ocr 相關 轉自:http://blog.csdn.net/goodshot/article/details/53214935 目錄(?)[-] The Kalman
『python』計算機視覺_OpenCV3庫安裝
找不到 新建 imp size libs redis pac nload .py Anaconda打包安裝: conda install --channel https://conda.anaconda.org/menpo opencv3 驗證: >>&g
Azure 認知服務 (3) 計算機視覺API - 分析圖像,使用C#代碼
iat query med ron oid sage pos png wait 《Windows Azure Platform 系列文章目錄》 在上一節中Azure 認知服務 (2) 計算機視覺API - 分析圖像,筆者介紹了如何使用API測試控制臺進行調試
『python』計算機視覺_OpenCV3目標檢測器(待續)
類型 print import 目標 return 視覺 != read svm bulid-in目標檢測器 調用內部函數進行人體檢測,實際效果並不好。民工三連: hog = cv2.HOGDescriptor()
計算機視覺(ComputerVision, CV)相關領域的站點鏈接
條碼識別 航空航天 類信息 模型生成 win public 語言識別 don char 關於計算機視覺(ComputerVision, CV)相關領域的站點鏈接,當中有CV牛人的主頁。CV研究小組的主頁,CV領域的paper,代碼。CV領域的最新動態。國
常用牛人主頁鏈接(計算機視覺、模式識別、機器學習相關方向,陸續更新
bject detail ebo abi err 技術 arch college eoj 牛人主頁(主頁有很多論文代碼) Serge Belongie at UC San Diego Antonio Torralba at MIT Alexei Ffros at CMU C
立體匹配的幾個算法使用
機器視覺1.這篇介紹SURF檢測blob的函數。函數/Functions函數名稱:detectSURFFeatures功能:利用The Speeded-Up Robust Features(SURF)算法檢測blob特征語法:points = detectSURFFeatures(I);
計算機視覺方向三大頂級會議
物理 來看 之一 兩個 spf eccv 比較 5% 內容 ICCV 的全稱是 IEEE International Conference on Computer Vision,國際計算機視覺大會,是計算機視覺方向的三大頂級會議之一,通常每兩年召開一次,2005 年 10
轉載:計算機視覺方向相關課程與書籍
ndk jdi itl zip back p12 rand monk context 原地址:https://github.com/jbhuang0604/awesome-computer-vision Books Computer Vision Computer
騰訊 AI Lab 計算機視覺中心人臉 & OCR團隊近期成果介紹(3)
之前 val 檢測 activit 服務器 get 取消 算法 創新 歡迎大家前往騰訊雲社區,獲取更多騰訊海量技術實踐幹貨哦~ 作者:周景超 在上一期中介紹了我們團隊部分已公開的國際領先的研究成果,近期我們有些新的成果和大家進一步分享。 1 人臉進展 人臉是最重要的視覺
計算機視覺---初級學習
計算機 圖像 png 視覺 com 證書 分享 工程目錄 http opencv免配置方法: 工程目錄下多出倆文件 Mat M(3,2,CV_8UC3,Scalar(0,0,225)); 高度 寬度 每個位置是占3字節,如果是圖像,是rgb, 元素是8