
基於51微控制器的智慧家居
名稱:智慧家居
QQ 416815882
很久沒寫博文了,今天決定用一上午記錄曾經用51微控制器做的一個智慧家居並作為自己第一個比賽的作品。
有以下幾個主要部分:
1.現室外光照在一定範圍內控制窗簾的自動開啟與關閉,可以讓上班族無需為每天拉、關窗簾而煩擾。
2.根據外界環境溼度來控制晾衣架的伸縮,在室外溼度比較大的時候為避免衣服受潮自動把晾衣架縮回來,反之正常溼度則可以伸出去讓衣服更好的晾晒。
3.室內出現燃氣洩漏時可以自動關閉燃氣閥門並給戶主手機發出報警訊號,並自動開啟風機以排除險情。
這幾個部分相結合,從而成為一個較完整的智慧家居系統,實現家居的智慧化和自動化。當然該系統同時還存在很多尚待改進的地方。
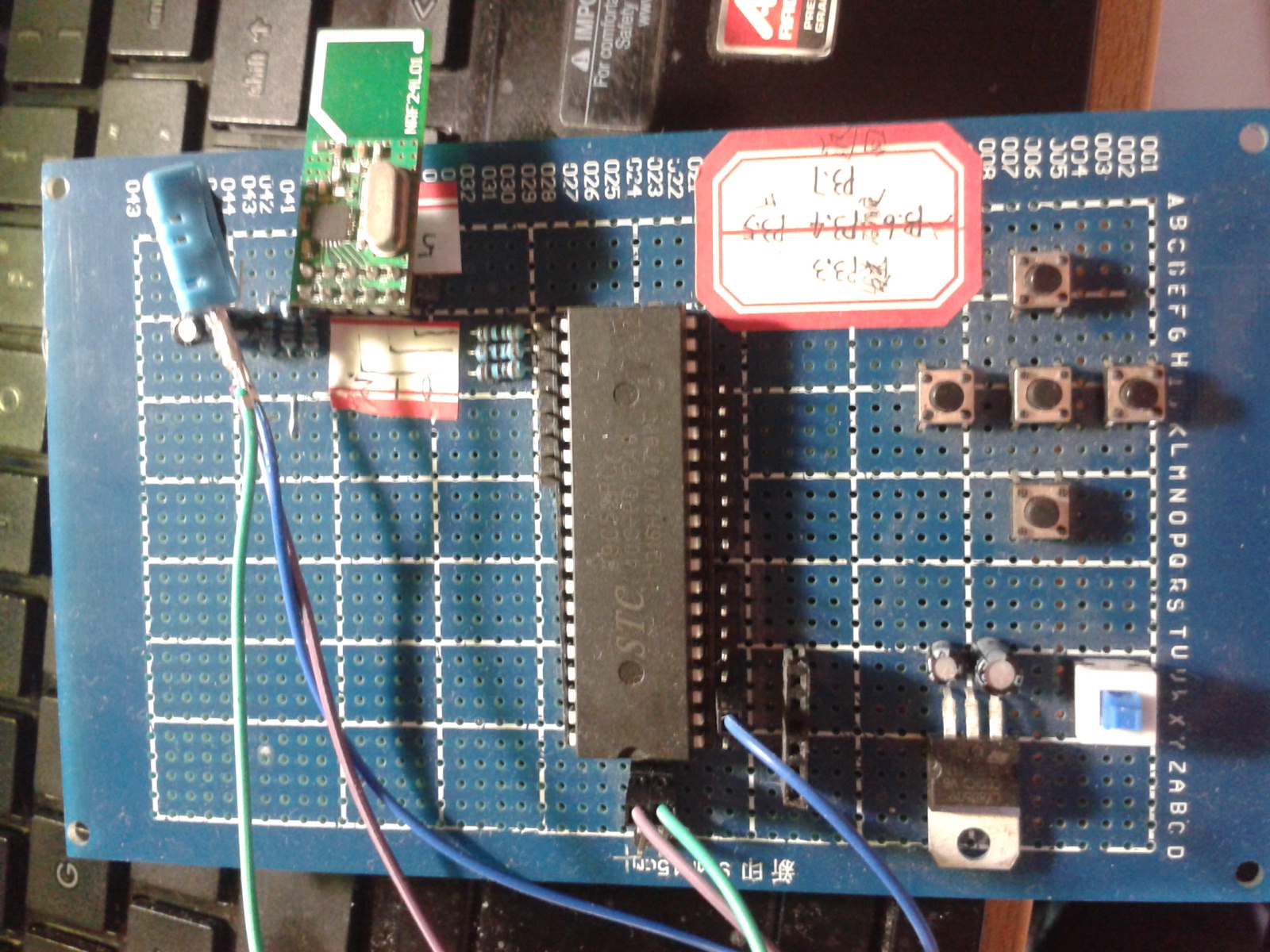
摘要以及材料:以STC89C51微控制器為控制核心,通過光敏感測器,煙霧感測器MQ-2,溫溼度感測器DHT11,繼電器,NRF24L01等設計的控制電路,實現
直流電機帶動風扇轉動(與煙霧感測器),步進電機帶動窗簾開閉(與光敏感測器有關),步進電機控制衣架伸縮(與溫溼度感測器有關)。
下面以簡潔的語言介紹三個感測器模組:
煙霧感測器模組:能檢測到煙霧,可用香菸或者燃燒的紙等測試。若有煙霧 DOUT口會輸出高電壓(約為5V),平時會輸出低電壓(約為0V),因此可用51微控制器的IO口直接檢測是否有煙霧。
光敏感測器模組:同理,可檢測到光,若光強高於一定程度,DOUT口會輸出高電壓(5V),在此不再贅述。
溫溼度感測器模組:此模組難於上面兩個模組。需要在軟體上寫出相應程式,之後可用(串列埠除錯助手)檢測會對外輸出五個資料,其中有溫度的兩個資料(整數部分和小數部分)和溼度(整數部分和小數部分)和一個檢驗位。(在本智慧家居中,通過一個無線NRF24L01模擬室外溼度的檢測並返回的控制中心室內的51微控制器,再與和微控制器有線連線的溫溼度感測器測得的資料進行比較)
總之,這三個模組是很簡單的。因為對外只需要三個連線線,兩個為正負供電,一個為資料線。除了溫溼度感測器需要用軟體除錯之外其餘的都可很輕易檢測並實現相應的反應動作。
關鍵核心:
通過STC89C51微控制器的IO口不斷的檢測各個感測器的反饋訊號,採集訊號,並與預定值進行比較,並做出相應反應。如,利用P2的低五位對溫溼度感測器,光敏感測器等進行資料採集和電壓採集,對採集到的資料進行分析和過濾從而得到環境的溫度,對採集到的電壓進行比較,由此判斷是否有光、光強是否達到一定值或是否有煙霧危險等等。用P1 P3的低四位控制兩個步進電機。用繼電器控制直流電機。
附照:
1.煙霧感測器
2.光敏感測器
3.溫溼度感測器
4.繼電器
5.無線模組
部分程式:
步進電機運轉部分:
void motor_ffw1()
{
unsigned char i;
unsigned int j;
for (j=0; j<12; j++) //轉1*n圈
{
for (i=0; i<8; i++) //一個週期轉30度
{
if(Q==1) P1 = FFW[i]&0x1f; //取資料
if(Q==2) P1 = FFZ[i]&0x1f;
delay_two(5); //調節轉速
}
}
}
溫溼度感測器讀取資料部分:
RH(); //室內
shinei_temp=U8T_data_H;
shinei_RH=U8RH_data_H;
RH2(); //室外
shiwai_temp=U8T_data_H;
shiwai_RH=U8RH_data_H;
//串列埠顯示程式
if(shinei_RH>shiwai_RH&&vis_run2==0)
{
if(vis_run2==0)
run2(1);//電機2正轉 把衣架伸出去
vis_run2=1;
}
if(shinei_RH<=shiwai_RH)
{
if(vis_run2==1)
run2(2);//電機2 反轉 把衣架縮回來
vis_run2=0;
}
煙霧檢測部分:
void check_smog() //檢測煙霧
{
if(com_yanwu==0 /*煙霧被檢測*/&&vis_send_smog==0/*且未傳送*/)
{
vis_send_smog=1;
fengji_run=0;
}
if(com_yanwu==1)
{
fengji_run=1;
vis_send_smog=0;
}
}
完整程式(分為室內室外兩個部分):
1.室內部分(一個c檔案,兩個h檔案):
#include <reg51.h>
#include <intrins.h>
#include "LQ12864.h"
typedef unsigned char uchar;
typedef unsigned char uint;
//****************************************IO埠定義***************************************
sbit CE =P2^0;
sbit CSN =P2^1;
sbit SCK =P2^2;
sbit MOSI =P2^3;
sbit MISO =P2^4;
sbit IRQ =P2^5;
//***********************************Buf陣列*******************************************
uchar TxBuf[32]= 0X00;
//*********************************************NRF24L01*************************************
#define TX_ADR_WIDTH 5 // 5 uints TX address width
#define RX_ADR_WIDTH 5 // 5 uints RX address width
#define TX_PLOAD_WIDTH 32 // 20 uints TX payload
#define RX_PLOAD_WIDTH 32 // 20 uints TX payload
uint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x11}; //本地地址
uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x10}; //接收地址
//***************************************NRF24L01暫存器指令*******************************************************
#define READ_REG 0x00 // 讀暫存器指令
#define WRITE_REG 0x20 // 寫暫存器指令
#define RD_RX_PLOAD 0x61 // 讀取接收資料指令
#define WR_TX_PLOAD 0xA0 // 寫待發資料指令
#define FLUSH_TX 0xE1 // 沖洗傳送 FIFO指令
#define FLUSH_RX 0xE2 // 沖洗接收 FIFO指令
#define REUSE_TX_PL 0xE3 // 定義重複裝載資料指令
#define NOP 0xFF // 保留
//*************************************SPI(nRF24L01)暫存器地址****************************************************
#define CONFIG 0x00 // 配置收發狀態,CRC校驗模式以及收發狀態響應方式
#define EN_AA 0x01 // 自動應答功能設定
#define EN_RXADDR 0x02 // 可用通道設定
#define SETUP_AW 0x03 // 收發地址寬度設定
#define SETUP_RETR 0x04 // 自動重發功能設定
#define RF_CH 0x05 // 工作頻率設定
#define RF_SETUP 0x06 // 發射速率、功耗功能設定
#define STATUS 0x07 // 狀態暫存器
#define OBSERVE_TX 0x08 // 傳送監測功能
#define CD 0x09 // 地址檢測
#define RX_ADDR_P0 0x0A // 頻道0接收資料地址
#define RX_ADDR_P1 0x0B // 頻道1接收資料地址
#define RX_ADDR_P2 0x0C // 頻道2接收資料地址
#define RX_ADDR_P3 0x0D // 頻道3接收資料地址
#define RX_ADDR_P4 0x0E // 頻道4接收資料地址
#define RX_ADDR_P5 0x0F // 頻道5接收資料地址
#define TX_ADDR 0x10 // 傳送地址暫存器
#define RX_PW_P0 0x11 // 接收頻道0接收資料長度
#define RX_PW_P1 0x12 // 接收頻道0接收資料長度
#define RX_PW_P2 0x13 // 接收頻道0接收資料長度
#define RX_PW_P3 0x14 // 接收頻道0接收資料長度
#define RX_PW_P4 0x15 // 接收頻道0接收資料長度
#define RX_PW_P5 0x16 // 接收頻道0接收資料長度
#define FIFO_STATUS 0x17 // FIFO棧入棧出狀態暫存器設定
//**************************************************************************************
void Delay(unsigned int s);
void Delayms(unsigned int xms);
void inerDelay_us(unsigned char n);
void init_NRF24L01(void);
uint SPI_RW(uint uchar);
uchar SPI_Read(uchar reg);
void SetRX_Mode(void);
uint SPI_RW_Reg(uchar reg, uchar value);
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars);
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars);
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf);
void nRF24L01_TxPacket(unsigned char * tx_buf);
//***********************************延時xms毫秒******************************************
void Delayms(unsigned int xms)
{
unsigned int i,j;
for(i=xms;i>0;i--)
for(j=110;j>0;j--);
}
//*****************************************長延時*****************************************
void Delay(unsigned int s)
{
unsigned int i;
for(i=0; i<s; i++);
for(i=0; i<s; i++);
}
//******************************************************************************************
uint bdata sta; //狀態標誌
sbit RX_DR =sta^6;
sbit TX_DS =sta^5;
sbit MAX_RT =sta^4;
/******************************************************************************************
/*延時函式
/******************************************************************************************/
void inerDelay_us(unsigned char n)
{
for(;n>0;n--)
_nop_();
}
//****************************************************************************************
/*NRF24L01初始化
//***************************************************************************************/
void init_NRF24L01(void)
{
inerDelay_us(100);
CE=0; // chip enable
CSN=1; // Spi disable
SCK=0; // Spi clock line init high
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 寫本地地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 寫接收端地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 頻道0自動 ACK應答允許
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 允許接收地址只有頻道0,如果需要多頻道可以參考Page21
SPI_RW_Reg(WRITE_REG + RF_CH, 0); // 設定通道工作為2.4GHZ,收發必須一致
SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //設定接收資料長度,本次設定為32位元組
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //設定發射速率為1MHZ,發射功率為最大值0dB
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收發完成中斷響應,16位CRC,主傳送
}
/****************************************************************************************************
/*函式:uint SPI_RW(uint uchar)
/*功能:NRF24L01的SPI寫時序
/****************************************************************************************************/
uint SPI_RW(uint uchar)
{
uint bit_ctr;
for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit
{
MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSI
uchar = (uchar << 1); // shift next bit into MSB..
SCK = 1; // Set SCK high..
uchar |= MISO; // capture current MISO bit
SCK = 0; // ..then set SCK low again
}
return(uchar); // return read uchar
}
/****************************************************************************************************
/*函式:uchar SPI_Read(uchar reg)
/*功能:NRF24L01的SPI時序
/****************************************************************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN low, initialize SPI communication...
SPI_RW(reg); // Select register to read from..
reg_val = SPI_RW(0); // ..then read registervalue
CSN = 1; // CSN high, terminate SPI communication
return(reg_val); // return register value
}
/****************************************************************************************************/
/*功能:NRF24L01讀寫暫存器函式
/****************************************************************************************************/
uint SPI_RW_Reg(uchar reg, uchar value)
{
uint status;
CSN = 0; // CSN low, init SPI transaction
status = SPI_RW(reg); // select register
SPI_RW(value); // ..and write value to it..
CSN = 1; // CSN high again
return(status); // return nRF24L01 status uchar
}
/****************************************************************************************************/
/*函式:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用於讀資料,reg:為暫存器地址,pBuf:為待讀出資料地址,uchars:讀出資料的個數
/****************************************************************************************************/
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; // Set CSN low, init SPI tranaction
status = SPI_RW(reg); // Select register to write to and read status uchar
for(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)
pBuf[uchar_ctr] = SPI_RW(0); //
CSN = 1;
return(status); // return nRF24L01 status uchar
}
/*********************************************************************************************************
/*函式:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用於寫資料:為暫存器地址,pBuf:為待寫入資料地址,uchars:寫入資料的個數
/*********************************************************************************************************/
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; //SPI使能
status = SPI_RW(reg);
for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //
SPI_RW(*pBuf++);
CSN = 1; //關閉SPI
return(status); //
}
/****************************************************************************************************/
/*函式:void SetRX_Mode(void)
/*功能:資料接收配置
/****************************************************************************************************/
void SetRX_Mode(void)
{
CE=0;
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收發完成中斷響應,16位CRC ,主接收
CE = 1;
inerDelay_us(130);
}
/******************************************************************************************************/
/*函式:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
/*功能:資料讀取後放如rx_buf接收緩衝區中
/******************************************************************************************************/
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
{
unsigned char revale=0;
sta=SPI_Read(STATUS); // 讀取狀態寄存其來判斷資料接收狀況
if(RX_DR) // 判斷是否接收到資料
{
CE = 0; //SPI使能
SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO buffer
CE=1; //外加
inerDelay_us(130); //外加
revale =1; //讀取資料完成標誌
}
SPI_RW_Reg(WRITE_REG+STATUS,0x7e); //接收到資料後RX_DR,TX_DS,MAX_PT都置高為1,通過寫1來清楚中斷標誌 //改為0通道
return revale;
}
/***********************************************************************************************************
/*函式:void nRF24L01_TxPacket(unsigned char * tx_buf)
/*功能:傳送 tx_buf中資料
/**********************************************************************************************************/
void nRF24L01_TxPacket(unsigned char * tx_buf)
{
CE=0; //StandBy I模式
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 裝載接收端地址
SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 裝載資料
// SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收發完成中斷響應,16位CRC,主傳送
CE=1; //置高CE,激發資料傳送
inerDelay_us(10);
}
//************************************主函式************************************************************
void main(void)
{
uchar RE=0;
// uchar packet;
LCD_Init();
init_NRF24L01() ;
SetRX_Mode();
Delayms(1);
LCD_6x8(0,0,"start");
while(1)
{
while(IRQ==1); //
RE= nRF24L01_RxPacket(TxBuf);
if(RE)//如果接收成功;
{
TxBuf=
}
}
}
以下為:"LQ12864.h"檔案
#include "REG51.h"
sbit LCD_SCL=P1^0; //時鐘 D0(SCLK)
sbit LCD_SDA=P1^1; //D1(MOSI) 資料
sbit LCD_RST=P1^2; //復位
sbit LCD_DC =P1^3; //資料/命令控制
#define XLevelL 0x00
#define XLevelH 0x10
#define XLevel ((XLevelH&0x0F)*16+XLevelL)
#define Max_Column 128
#define Max_Row 64
#define Brightness 0xCF
#define X_WIDTH 128
#define Y_WIDTH 64
void LCD_DLY_ms(unsigned int ms) //LCD 延時1ms
{
unsigned int a;
while(ms)
{
a=1800;
while(a--);
ms--;
}
return;
}
void LCD_WrDat(unsigned char dat) //**LCD寫資料
{
unsigned char i=8;
LCD_DC=1;
for(i=0;i<8;i++) //傳送一個八位資料
{
LCD_SCL=0;
LCD_SDA=dat&0x80;
LCD_SCL=1;
dat<<=1;
}
}
void LCD_WrCmd(unsigned char cmd) //****LCD寫命令
{
unsigned char i=8;
LCD_DC=0;
for(i=0;i<8;i++) //傳送一個八位資料
{
LCD_SCL=0;
LCD_SDA=cmd&0x80;
LCD_SCL=1;
cmd<<=1;;
}
}
void LCD_Setxy(unsigned char x, unsigned char y) //LCD 設定座標
{
LCD_WrCmd(0xb0+y);
LCD_WrCmd(((x&0xf0)>>4)|0x10);
LCD_WrCmd((x&0x0f)|0x01);
}
void LCD_Fill(unsigned char bmp_dat) //bmp_dat=0x00全屏滅,bmp_dat=0xff全屏亮
{
unsigned char y,x;
for(y=0;y<8;y++)
{
LCD_WrCmd(0xb0+y);
LCD_WrCmd(0x01);
LCD_WrCmd(0x10);
for(x=0;x<X_WIDTH;x++)
LCD_WrDat(bmp_dat);
}
}
/*void LCD_CLS(void) //LCD復位
{
unsigned char y,x;
for(y=0;y<8;y++)
{
LCD_WrCmd(0xb0+y);
LCD_WrCmd(0x01);
LCD_WrCmd(0x10);
for(x=0;x<X_WIDTH;x++)
LCD_WrDat(0);
}
}*/
void LCD_Init(void) //LCD初始化
{
LCD_SCL=1;
LCD_RST=0;
LCD_DLY_ms(50);
LCD_RST=1; //從上電到下面開始初始化要有足夠的時間,即等待RC復位完畢
LCD_WrCmd(0xae);//--關閉顯示 turn off oled panel
LCD_WrCmd(0x00);//---設定低列地址 set low column address
LCD_WrCmd(0x10);//---高列地址 set high column address
LCD_WrCmd(0x40);//--設定起始地址對映記憶體顯示開始行(0x 00 ~ 0x3f) set start line address Set Mapping RAM Display Start Line (0x00~0x3F)
LCD_WrCmd(0x81);//--設定對比度控制暫存器 set contrast control register
LCD_WrCmd(0xcf); // 電流輸出亮度設定賽格 Set SEG Output Current Brightness
LCD_WrCmd(0xa1);//--設定賽格/列對映 0xa0左右反置0xa1正常 Set SEG/Column Mapping 0xa0左右反置 0xa1正常
LCD_WrCmd(0xc8);//設定網站/行掃描方向 0xc0上下反置 0xc8正常 Set COM/Row Scan Direction
LCD_WrCmd(0xa6);//--正常顯示 set normal display
LCD_WrCmd(0xa8);//--集複用率(1 - 64) set multiplex ratio(1 to 64)
LCD_WrCmd(0x3f);//--1/64 duty
LCD_WrCmd(0xd3);//-設定顯示偏移位移對映記憶體計數器(0x 00 ~ 0x3f) set display offset Shift Mapping RAM Counter (0x00~0x3F)
LCD_WrCmd(0x00);//-不偏移 not offset
LCD_WrCmd(0xd5);//--設定顯示時鐘的分頻比/振盪器頻率 set display clock divide ratio/oscillator frequency
LCD_WrCmd(0x80);//--組分比,時鐘設定為100幀/秒 set divide ratio, Set Clock as 100 Frames/Sec
LCD_WrCmd(0xd9);//--設定充電週期 set pre-charge period
LCD_WrCmd(0xf1);//15集充電放電1鍾鐘錶 Set Pre-Charge as 15 Clocks & Discharge as 1 Clock
LCD_WrCmd(0xda);//--設定元件的引腳配置硬體 set com pins hardware configuration
LCD_WrCmd(0x12);
LCD_WrCmd(0xdb);//--集vcomh set vcomh
LCD_WrCmd(0x40);//威科姆取消水平集 Set VCOM Deselect Level
LCD_WrCmd(0x20);//-設定頁面定址模式(0x 00 /將/ 0x02) Set Page Addressing Mode (0x00/0x01/0x02)
LCD_WrCmd(0x02);//
LCD_WrCmd(0x8d);//--充電泵啟用/禁用 set Charge Pump enable/disable
LCD_WrCmd(0x14);//--集(0x 10個)禁用 set(0x10) disable
LCD_WrCmd(0xa4);// 使整個顯示(0xa4 / 0xa5) Disable Entire Display On (0xa4/0xa5)
LCD_WrCmd(0xa6);// 禁用反顯示(0xa6 / 7) Disable Inverse Display On (0xa6/a7)
LCD_WrCmd(0xaf);//--打開面板 turn on oled panel
LCD_Fill(0x00); //初始清屏
LCD_Setxy(0,0);
}
void LCD_6x8(unsigned char x, y,unsigned char ch[])//顯示6*8一組標準ASCII字串 顯示的座標(x,y),y為頁範圍0~7
{
unsigned char c=0,i=0,j=0;
while (ch[j]!='\0')
{
c =ch[j]-32;
if(x>126)
{x=0;y++;}
LCD_Setxy(x,y);
for(i=0;i<6;i++)
LCD_WrDat(F6x8[c][i]);
x+=6;
j++;
}
}
void LCD_Cler_6x8(unsigned char x,y,n)//清除N個6*8字元
{
unsigned int i=0;
LCD_Setxy(x,y);
if(x>126)
{x=0;y++;}
for(i=0;i<6*n;i++)
LCD_WrDat(0x00);
}
void ready(unsigned char x,y,unsigned int num)
{
switch (num)
{
case 0:
LCD_6x8(x,y,"0");break;
case 1:
LCD_6x8(x,y,"1");break;
case 2:
LCD_6x8(x,y,"2");break;
case 3:
LCD_6x8(x,y,"3");break;
case 4:
LCD_6x8(x,y,"4");break;
case 5:
LCD_6x8(x,y,"5");break;
case 6:
LCD_6x8(x,y,"6");break;
case 7:
LCD_6x8(x,y,"7");break;
case 8:
LCD_6x8(x,y,"8");break;
case 9:
LCD_6x8(x,y,"9");break;
}
}
/*void LCD_8x16(unsigned char x, y,unsigned char ch[])//顯示8*16一組標準ASCII字串 顯示的座標(x,y),y為頁範圍0~7
{
unsigned char c=0,i=0,j=0;
while (ch[j]!='\0')
{
c =ch[j]-32;
if(x>120)
{x=0;y++;}
LCD_Setxy(x,y);
for(i=0;i<8;i++)
LCD_WrDat(F8X16[c*16+i]);
LCD_Setxy(x,y+1);
for(i=0;i<8;i++)
LCD_WrDat(F8X16[c*16+i+8]);
x+=8;
j++;
}
}
void LCD_Cler_8x16(unsigned char x, y,n) //清除n個8*16字元
{
unsigned char i;
if(x>120)
{x=0;y++;}
LCD_Setxy(x,y);
for(i=0;i<8*n;i++)
LCD_WrDat(0x00);
LCD_Setxy(x,y+1);
for(i=0;i<8*n;i++)
LCD_WrDat(0x00);
}
void LCD_16x16(unsigned char x, y, N)//顯示16*16點陣 顯示的座標(x,y),y為頁範圍0~7
{
unsigned char wm=0;
unsigned int adder=32*N; //
LCD_Setxy(x , y);
for(wm = 0;wm < 16;wm++) //
{
LCD_WrDat(F16x16[adder]);
adder += 1;
}
LCD_Setxy(x,y + 1);
for(wm = 0;wm < 16;wm++) //
{
LCD_WrDat(F16x16[adder]);
adder += 1;
}
}
void LCD_Cler_16x16(unsigned char x,y,n)//清除n個16*16字
{
unsigned char i=0;
LCD_Setxy(x,y);
for(i=0;i<16*n;i++)
LCD_WrDat(0x00);
LCD_Setxy(x,y+1);
for(i=0;i<16*n;i++)
LCD_WrDat(0x00);
}
void Draw_BMP(unsigned char x0, y0,x1, y1,unsigned char BMP[])//顯示顯示BMP圖片128×64起始點座標(x,y),x的範圍0~127,y為頁的範圍0~7*
{
unsigned int j=0;
unsigned char x,y;
if(y1%8==0)
y=y1/8;
else
y=y1/8+1;
for(y=y0;y<y1;y++)
{
LCD_Setxy(x0,y);
for(x=x0;x<x1;x++)
{
LCD_WrDat(BMP[j++]);
}
}
}*/
以下為:DHT11.h檔案
//****************************************************************//
#include <reg51.h>
#include <intrins.h>
//
typedef unsigned char U8; /* defined for unsigned 8-bits integer variable 無符號8位整型變數 */
typedef signed char S8; /* defined for signed 8-bits integer variable 有符號8位整型變數 */
typedef unsigned int U16; /* defined for unsigned 16-bits integer variable 無符號16位整型變數 */
typedef signed int S16; /* defined for signed 16-bits integer variable 有符號16位整型變數 */
typedef unsigned long U32; /* defined for unsigned 32-bits integer variable 無符號32位整型變數 */
typedef signed long S32; /* defined for signed 32-bits integer variable 有符號32位整型變數 */
typedef float F32; /* single precision floating point variable (32bits) 單精度浮點數(32位長度) */
typedef double F64; /* double precision floating point variable (64bits) 雙精度浮點數(64位長度) */
//
#define uchar unsigned char
#define uint unsigned int
#define Data_0_time 4
//----------------------------------------------//
//----------------IO口定義區--------------------//
//----------------------------------------------//
sbit P2_0 = P2^0 ;
//----------------------------------------------//
//----------------定義區--------------------//
//----------------------------------------------//
U8 U8FLAG,k;
U8 U8count,U8temp;
U8 U8T_data_H,U8T_data_L,U8RH_data_H,U8RH_data_L,U8checkdata;
U8 U8T_data_H_temp,U8T_data_L_temp,U8RH_data_H_temp,U8RH_data_L_temp,U8checkdata_temp;
U8 U8comdata;
U8 count, count_r=0;
U16 U16temp1,U16temp2;
/***************************************************************
SendData(U8 *a)
{
outdata[0] = a[0];
outdata[1] = a[1];
outdata[2] = a[2];
outdata[3] = a[3];
outdata[4] = a[4];
count = 1;
SBUF=outdata[0];
}
*************************************************************/
void Delay(U16 j)
{ U8 i;
for(;j>0;j--)
{
for(i=0;i<27;i++);
}
}
void Delay_10us(void)
{
U8 i;
i--;
i--;
i--;
i--;
i--;
i--;
}
void COM(void)
{
U8 i;
for(i=0;i<8;i++)
{
U8FLAG=2;
while((!P2_0)&&U8FLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
U8temp=0;
if(P2_0)U8temp=1;
U8FLAG=2;
while((P2_0)&&U8FLAG++);
//超時則跳出for迴圈
if(U8FLAG==1)break;
//判斷資料位是0還是1
// 如果高電平高過預定0高電平值則資料位為 1
U8comdata<<=1;
U8comdata|=U8temp; //0
}//rof
}
//--------------------------------
//-----溼度讀取子程式 ------------
//--------------------------------
//----以下變數均為全域性變數--------
//----溫度高8位== U8T_data_H------
//----溫度低8位== U8T_data_L------
//----溼度高8位== U8RH_data_H-----
//----溼度低8位== U8RH_data_L-----
//----校驗 8位 == U8checkdata-----
//----呼叫相關子程式如下----------
//---- Delay();, Delay_10us();,COM();
//--------------------------------
void RH(void)
{
//主機拉低18ms
P2_0=0;
Delay(180);
P2_0=1;
//匯流排由上拉電阻拉高 主機延時20us
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
//主機設為輸入 判斷從機響應訊號
P2_0=1;
//判斷從機是否有低電平響應訊號 如不響應則跳出,響應則向下執行
if(!P2_0) //T !
{
U8FLAG=2;
//判斷從機是否發出 80us 的低電平響應訊號是否結束
while((!P2_0)&&U8FLAG++);
U8FLAG=2;
//判斷從機是否發出 80us 的高電平,如發出則進入資料接收狀態
while((P2_0)&&U8FLAG++);
//資料接收狀態
COM();
U8RH_data_H_temp=U8comdata;
COM();
U8RH_data_L_temp=U8comdata;
COM();
U8T_data_H_temp=U8comdata;
COM();
U8T_data_L_temp=U8comdata;
COM();
U8checkdata_temp=U8comdata;
P2_0=1;
//資料校驗
U8temp=(U8T_data_H_temp+U8T_data_L_temp+U8RH_data_H_temp+U8RH_data_L_temp);
if(U8temp==U8checkdata_temp)
{
U8RH_data_H=U8RH_data_H_temp;
U8RH_data_L=U8RH_data_L_temp;
U8T_data_H=U8T_data_H_temp;
U8T_data_L=U8T_data_L_temp;
U8checkdata=U8checkdata_temp;
}//fi
}//fi
}
2.室外部分():
c檔案部分:
#include "REG51.h"
#include "intrins.h"
#include "Tx_nrf.h"
#include "DHT11.h"
void main()
{
unsigned int i,table=0,dish;
unsigned char car[3],keyy[10];
init_NRF24L01();
while(1)
{
//------------------------
//呼叫溫溼度讀取子程式
RH();
//串列埠顯示程式
//--------------------------
car[0]=U8RH_data_H;
Delay(20000);
IRQ=1;
SPI_RW(FLUSH_TX );//清空TX_FIFO//此處必要。否則經常出錯
nRF24L01_TxPacket(car); // Transmit Tx buffer data
CE=0;
while(IRQ==1);//等待發送完成
sta=SPI_Read(STATUS);// 讀取狀態寄存其來判斷資料接收狀況
if(TX_DS)//判斷是否傳送成功
{
for(i=0; i<8; i++)
{
// LCD_16x16(i*16,3,i+8); //傳送成功
} //SetRX_Mode() //變為接受狀態
}
else
{
for(i=0; i<8; i++) //若要變為傳送模式,init_NRF24L01() ;或CE=0;SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e);
{
// LCD_16x16(i*16,3,i+16); //傳送失敗
}
}
SPI_RW_Reg(WRITE_REG+STATUS,0X7e); //RX_DR,TX_DS,MAX_PT都置高為1,通過寫1來清除中斷標誌
}
}
以下為TX—NRF.h部分:
#include <reg51.h>
#include <intrins.h>
typedef unsigned char uchar;
typedef unsigned char uint;
//****************************************IO埠定義***************************************
sbit CE =P2^5;
sbit CSN =P2^1;
sbit SCK =P2^4;
sbit MOSI =P2^0;
sbit MISO =P2^3;
sbit IRQ =P2^2;
//*********************************************NRF24L01*************************************
#define TX_ADR_WIDTH 5 // 5 uints TX address width
#define RX_ADR_WIDTH 5 // 5 uints RX address width
#define TX_PLOAD_WIDTH 32 // 20 uints TX payload
#define RX_PLOAD_WIDTH 32 // 20 uints TX payload
uint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x13}; //本地地址
uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x13}; //接收地址
//***************************************NRF24L01暫存器指令*******************************************************
#define READ_REG 0x00 // 讀暫存器指令
#define WRITE_REG 0x20 // 寫暫存器指令
#define RD_RX_PLOAD 0x61 // 讀取接收資料指令
#define WR_TX_PLOAD 0xA0 // 寫待發資料指令
#define FLUSH_TX 0xE1 // 沖洗傳送 FIFO指令
#define FLUSH_RX 0xE2 // 沖洗接收 FIFO指令
#define REUSE_TX_PL 0xE3 // 定義重複裝載資料指令
#define NOP 0xFF // 保留
//*************************************SPI(nRF24L01)暫存器地址****************************************************
#define CONFIG 0x00 // 配置收發狀態,CRC校驗模式以及收發狀態響應方式
#define EN_AA 0x01 // 自動應答功能設定
#define EN_RXADDR 0x02 // 可用通道設定
#define SETUP_AW 0x03 // 收發地址寬度設定
#define SETUP_RETR 0x04 // 自動重發功能設定
#define RF_CH 0x05 // 工作頻率設定
#define RF_SETUP 0x06 // 發射速率、功耗功能設定
#define STATUS 0x07 // 狀態暫存器
#define OBSERVE_TX 0x08 // 傳送監測功能
#define CD 0x09 // 地址檢測
#define RX_ADDR_P0 0x0A // 頻道0接收資料地址
#define RX_ADDR_P1 0x0B // 頻道1接收資料地址
#define RX_ADDR_P2 0x0C // 頻道2接收資料地址
#define RX_ADDR_P3 0x0D // 頻道3接收資料地址
#define RX_ADDR_P4 0x0E // 頻道4接收資料地址
#define RX_ADDR_P5 0x0F // 頻道5接收資料地址
#define TX_ADDR 0x10 // 傳送地址暫存器
#define RX_PW_P0 0x11 // 接收頻道0接收資料長度
#define RX_PW_P1 0x12 // 接收頻道0接收資料長度
#define RX_PW_P2 0x13 // 接收頻道0接收資料長度
#define RX_PW_P3 0x14 // 接收頻道0接收資料長度
#define RX_PW_P4 0x15 // 接收頻道0接收資料長度
#define RX_PW_P5 0x16 // 接收頻道0接收資料長度
#define FIFO_STATUS 0x17 // FIFO棧入棧出狀態暫存器設定
//**************************************************************************************
void Delay(unsigned int s);
void Delayms(unsigned int xms);
void inerDelay_us(unsigned char n);
void init_NRF24L01(void);
uint SPI_RW(uint uchar);
uchar SPI_Read(uchar reg);
void SetRX_Mode(void);
uint SPI_RW_Reg(uchar reg, uchar value);
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars);
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars);
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf);
void nRF24L01_TxPacket(unsigned char * tx_buf);
//******************************************************************************************
uint bdata sta; //狀態標誌
sbit RX_DR =sta^6;
sbit TX_DS =sta^5;
sbit MAX_RT =sta^4;
/******************************************************************************************
/*延時函式
/******************************************************************************************/
void inerDelay_us(unsigned char n)
{
for(;n>0;n--)
_nop_();
}
//****************************************************************************************
/*NRF24L01初始化
//***************************************************************************************/
void init_NRF24L01(void)
{
inerDelay_us(100);
CE=0; // chip enable
CSN=1; // Spi disable
SCK=0; // Spi clock line init high
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 寫本地地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 寫接收端地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 頻道0自動 ACK應答允許
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x1f); //自動重發15次、延時0.5ms+86us
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 允許接收地址只有頻道0,如果需要多頻道可以參考Page21
SPI_RW_Reg(WRITE_REG + RF_CH, 0); // 設定通道工作為2.4GHZ,收發必須一致
SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //設定接收資料長度,本次設定為32位元組
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //設定發射速率為1MHZ,發射功率為最大值0dB
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收發完成中斷響應,16位CRC,主傳送
}
/****************************************************************************************************
/*函式:uint SPI_RW(uint uchar)
/*功能:NRF24L01的SPI寫時序
/****************************************************************************************************/
uint SPI_RW(uint uchar)
{
uint bit_ctr;
for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit
{
MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSI
uchar = (uchar << 1); // shift next bit into MSB..
SCK = 1; // Set SCK high..
uchar |= MISO; // capture current MISO bit
SCK = 0; // ..then set SCK low again
}
return(uchar); // return read uchar
}
/****************************************************************************************************
/*函式:uchar SPI_Read(uchar reg)
/*功能:NRF24L01的SPI時序
/****************************************************************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN low, initialize SPI communication...
SPI_RW(reg); // Select register to read from..
reg_val = SPI_RW(0); // ..then read registervalue
CSN = 1; // CSN high, terminate SPI communication
return(reg_val); // return register value
}
/****************************************************************************************************/
/*功能:NRF24L01讀寫暫存器函式
/****************************************************************************************************/
uint SPI_RW_Reg(uchar reg, uchar value)
{
uint status;
CSN = 0; // CSN low, init SPI transaction
status = SPI_RW(reg); // select register
SPI_RW(value); // ..and write value to it..
CSN = 1; // CSN high again
return(status); // return nRF24L01 status uchar
}
/****************************************************************************************************/
/*函式:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用於讀資料,reg:為暫存器地址,pBuf:為待讀出資料地址,uchars:讀出資料的個數
/****************************************************************************************************/
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; // Set CSN low, init SPI tranaction
status = SPI_RW(reg); // Select register to write to and read status uchar
for(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)
pBuf[uchar_ctr] = SPI_RW(0); //
CSN = 1;
return(status); // return nRF24L01 status uchar
}
/*********************************************************************************************************
/*函式:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用於寫資料:為暫存器地址,pBuf:為待寫入資料地址,uchars:寫入資料的個數
/*********************************************************************************************************/
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; //SPI使能
status = SPI_RW(reg);
for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //
SPI_RW(*pBuf++);
CSN = 1; //關閉SPI
return(status); //
}
/****************************************************************************************************/
/*函式:void SetRX_Mode(void)
/*功能:資料接收配置
/****************************************************************************************************/
void SetRX_Mode(void)
{
CE=0;
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // IRQ收發完成中斷響應,16位CRC ,主接收
CE = 1;
inerDelay_us(130);
}
/******************************************************************************************************/
/*函式:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
/*功能:資料讀取後放如rx_buf接收緩衝區中
/******************************************************************************************************/
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)
{
unsigned char revale=0;
sta=SPI_Read(STATUS); // 讀取狀態寄存其來判斷資料接收狀況
if(RX_DR) // 判斷是否接收到資料
{
CE = 0; //SPI使能
SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO buffer
revale =1; //讀取資料完成標誌
}
SPI_RW_Reg(WRITE_REG+STATUS,0x7e); //接收到資料後RX_DR,TX_DS,MAX_PT都置高為1,通過寫1來清楚中斷標誌
return revale;
}
/***********************************************************************************************************
/*函式:void nRF24L01_TxPacket(unsigned char * tx_buf)
/*功能:傳送 tx_buf中資料
/**********************************************************************************************************/
void nRF24L01_TxPacket(unsigned char * tx_buf)
{
CE=0; //StandBy I模式
// SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收發完成中斷響應,16位CRC,主傳送
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 裝載接收端地址
SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 裝載資料
CE=1; //置高CE,激發資料傳送
inerDelay_us(10);
}
以下為DHT11。H部分:
//****************************************************************//
// DHT21使用範例
//微控制器 : AT89S52 或 STC89C52RC
// 功能 :串列埠傳送溫溼度資料 晶振 11.0592M 波特率 9600
//硬體連線: P2.0口為通訊口連線DHT11,DHT11的電源和地連線微控制器的電源和地,微控制器串列埠加MAX232連線電腦
// 公司 :奧鬆電子
//****************************************************************//
#include <reg51.h>
#include <intrins.h>
//
typedef unsigned char U8; /* defined for unsigned 8-bits integer variable 無符號8位整型變數 */
typedef signed char S8; /* defined for signed 8-bits integer variable 有符號8位整型變數 */
typedef unsigned int U16; /* defined for unsigned 16-bits integer variable 無符號16位整型變數 */
typedef signed int S16; /* defined for signed 16-bits integer variable 有符號16位整型變數 */
typedef unsigned long U32; /* defined for unsigned 32-bits integer variable 無符號32位整型變數 */
typedef signed long S32; /* defined for signed 32-bits integer variable 有符號32位整型變數 */
typedef float F32; /* single precision floating point variable (32bits) 單精度浮點數(32位長度) */
typedef double F64; /* double precision floating point variable (64bits) 雙精度浮點數(64位長度) */
//
#define uchar unsigned char
#define uint unsigned int
#define Data_0_time 4
//----------------------------------------------//
//----------------IO口定義區--------------------//
//----------------------------------------------//
sbit P2_0 = P1^2 ;
sbit P2_1 = P2^1 ;
//----------------------------------------------//
//----------------定義區--------------------//
//----------------------------------------------//
U8 U8FLAG,k;
U8 U8count,U8temp;
U8 U8T_data_H,U8T_data_L,U8RH_data_H,U8RH_data_L,U8checkdata;
U8 U8T_data_H_temp,U8T_data_L_temp,U8RH_data_H_temp,U8RH_data_L_temp,U8checkdata_temp;
U8 U8comdata;
U8 count, count_r=0;
U16 U16temp1,U16temp2;
/***************************************************************
SendData(U8 *a)
{
outdata[0] = a[0];
outdata[1] = a[1];
outdata[2] = a[2];
outdata[3] = a[3];
outdata[4] = a[4];
count = 1;
SBUF=outdata[0];
}
*************************************************************/
void Delay(U16 j)
{ U8 i;
for(;j>0;j--)
{
for(i=0;i<27;i++);
}
}
void Delay_10us(void)
{
U8 i;
i--;
i--;
i--;
i--;
i--;
i--;
}
void COM(void)
{
U8 i;
for(i=0;i<8;i++)
{
U8FLAG=2;
while((!P2_0)&&U8FLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
U8temp=0;
if(P2_0)U8temp=1;
U8FLAG=2;
while((P2_0)&&U8FLAG++);
//超時則跳出for迴圈
if(U8FLAG==1)break;
//判斷資料位是0還是1
// 如果高電平高過預定0高電平值則資料位為 1
U8comdata<<=1;
U8comdata|=U8temp; //0
}//rof
}
void COM2(void)
{
U8 i;
for(i=0;i<8;i++)
{
U8FLAG=2;
while((!P2_1)&&U8FLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
U8temp=0;
if(P2_1)U8temp=1;
U8FLAG=2;
while((P2_1)&&U8FLAG++);
//超時則跳出for迴圈
if(U8FLAG==1)break;
//判斷資料位是0還是1
// 如果高電平高過預定0高電平值則資料位為 1
U8comdata<<=1;
U8comdata|=U8temp; //0
}//rof
}
//--------------------------------
//-----溼度讀取子程式 ------------
//--------------------------------
//----以下變數均為全域性變數--------
//----溫度高8位== U8T_data_H------
//----溫度低8位== U8T_data_L------
//----溼度高8位== U8RH_data_H-----
//----溼度低8位== U8RH_data_L-----
//----校驗 8位 == U8checkdata-----
//----呼叫相關子程式如下----------
//---- Delay();, Delay_10us();,COM();
//--------------------------------
void RH(void)
{
//主機拉低18ms
P2_0=0;
Delay(180);
P2_0=1;
//匯流排由上拉電阻拉高 主機延時20us
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
//主機設為輸入 判斷從機響應訊號
P2_0=1;
//判斷從機是否有低電平響應訊號 如不響應則跳出,響應則向下執行
if(!P2_0) //T !
{
U8FLAG=2;
//判斷從機是否發出 80us 的低電平響應訊號是否結束
while((!P2_0)&&U8FLAG++);
U8FLAG=2;
//判斷從機是否發出 80us 的高電平,如發出則進入資料接收狀態
while((P2_0)&&U8FLAG++);
//資料接收狀態
COM();
U8RH_data_H_temp=U8comdata;
COM();
U8RH_data_L_temp=U8comdata;
COM();
U8T_data_H_temp=U8comdata;
COM();
U8T_data_L_temp=U8comdata;
COM();
U8checkdata_temp=U8comdata;
P2_0=1;
//資料校驗
U8temp=(U8T_data_H_temp+U8T_data_L_temp+U8RH_data_H_temp+U8RH_data_L_temp);
if(U8temp==U8checkdata_temp)
{
U8RH_data_H=U8RH_data_H_temp;
U8RH_data_L=U8RH_data_L_temp;
U8T_data_H=U8T_data_H_temp;
U8T_data_L=U8T_data_L_temp;
U8checkdata=U8checkdata_temp;
}//fi
}//fi
}
void RH2(void)
{
//主機拉低18ms
P2_1=0;
Delay(180);
P2_1=1;
//匯流排由上拉電阻拉高 主機延時20us
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
//主機設為輸入 判斷從機響應訊號
P2_1=1;
//判斷從機是否有低電平響應訊號 如不響應則跳出,響應則向下執行
if(!P2_1) //T !
{
U8FLAG=2;
//判斷從機是否發出 80us 的低電平響應訊號是否結束
while((!P2_1)&&U8FLAG++);
U8FLAG=2;
//判斷從機是否發出 80us 的高電平,如發出則進入資料接收狀態
while((P2_1)&&U8FLAG++);
//資料接收狀態
COM2();
U8RH_data_H_temp=U8comdata;
COM2();
U8RH_data_L_temp=U8comdata;
COM2();
U8T_data_H_temp=U8comdata;
COM2();
U8T_data_L_temp=U8comdata;
COM2();
U8checkdata_temp=U8comdata;
P2_1=1;
//資料校驗
U8temp=(U8T_data_H_temp+U8T_data_L_temp+U8RH_data_H_temp+U8RH_data_L_temp);
if(U8temp==U8checkdata_temp)
{
U8RH_data_H=U8RH_data_H_temp;
U8RH_data_L=U8RH_data_L_temp;
U8T_data_H=U8T_data_H_temp;
U8T_data_L=U8T_data_L_temp;
U8checkdata=U8checkdata_temp;
}//fi
}//fi
}
over~~如果不正確或者不好的地方,請指出~