
Linux ALSA音效卡驅動之七:ASoC架構中的Codec
1. Codec簡介
在移動裝置中,Codec的作用可以歸結為4種,分別是:
- 對PCM等訊號進行D/A轉換,把數字的音訊訊號轉換為模擬訊號
- 對Mic、Linein或者其他輸入源的模擬訊號進行A/D轉換,把模擬的聲音訊號轉變CPU能夠處理的數字訊號
- 對音訊通路進行控制,比如播放音樂,收聽調頻收音機,又或者接聽電話時,音訊訊號在codec內的流通路線是不一樣的
- 對音訊訊號做出相應的處理,例如音量控制,功率放大,EQ控制等等
ASoC對Codec的這些功能都定義好了一些列相應的介面,以方便地對Codec進行控制。ASoC對Codec驅動的一個基本要求是:驅動程式的程式碼必須要做到平臺無關性,以方便同一個Codec的程式碼不經修改即可用在不同的平臺上。以下的討論基於wolfson的Codec晶片WM8994,kernel的版本3.3.x。
/*****************************************************************************************************/
宣告:本博內容均由http://blog.csdn.net/droidphone原創,轉載請註明出處,謝謝!
/*****************************************************************************************************/
2. ASoC中對Codec的資料抽象
描述Codec的最主要的幾個資料結構分別是:snd_soc_codec,snd_soc_codec_driver,snd_soc_dai,snd_soc_dai_driver,其中的snd_soc_dai和snd_soc_dai_driver在ASoC的Platform驅動中也會使用到,Platform和Codec的DAI通過snd_soc_dai_link結構,在Machine驅動中進行繫結連線。下面我們先看看這幾個結構的定義,這裡我只貼出我要關注的欄位,詳細的定義請參照:/include/sound/soc.h。/* SoC Audio Codec device */ struct snd_soc_codec { const char *name; /* Codec的名字*/ struct device *dev; /* 指向Codec裝置的指標 */ const struct snd_soc_codec_driver *driver; /* 指向該codec的驅動的指標 */ struct snd_soc_card *card; /* 指向Machine驅動的card例項 */ int num_dai; /* 該Codec數字介面的個數,目前越來越多的Codec帶有多個I2S或者是PCM介面 */ int (*volatile_register)(...); /* 用於判定某一暫存器是否是volatile */ int (*readable_register)(...); /* 用於判定某一暫存器是否可讀 */ int (*writable_register)(...); /* 用於判定某一暫存器是否可寫 */ /* runtime */ ...... /* codec IO */ void *control_data; /* 該指標指向的結構用於對codec的控制,通常和read,write欄位聯合使用 */ enum snd_soc_control_type control_type;/* 可以是SND_SOC_SPI,SND_SOC_I2C,SND_SOC_REGMAP中的一種 */ unsigned int (*read)(struct snd_soc_codec *, unsigned int); /* 讀取Codec暫存器的函式 */ int (*write)(struct snd_soc_codec *, unsigned int, unsigned int); /* 寫入Codec暫存器的函式 */ /* dapm */ struct snd_soc_dapm_context dapm; /* 用於DAPM控制元件 */ };
snd_soc_codec_driver:
/* codec driver */
struct snd_soc_codec_driver {
/* driver ops */
int (*probe)(struct snd_soc_codec *); /* codec驅動的probe函式,由snd_soc_instantiate_card回撥 */
int (*remove)(struct snd_soc_codec *);
int (*suspend)(struct snd_soc_codec *); /* 電源管理 */
int (*resume)(struct snd_soc_codec *); /* 電源管理 */
/* Default control and setup, added after probe() is run */
const struct snd_kcontrol_new *controls; /* 音訊控制元件指標 */
const struct snd_soc_dapm_widget *dapm_widgets; /* dapm部件指標 */
const struct snd_soc_dapm_route *dapm_routes; /* dapm路由指標 */
/* codec wide operations */
int (*set_sysclk)(...); /* 時鐘配置函式 */
int (*set_pll)(...); /* 鎖相環配置函式 */
/* codec IO */
unsigned int (*read)(...); /* 讀取codec暫存器函式 */
int (*write)(...); /* 寫入codec暫存器函式 */
int (*volatile_register)(...); /* 用於判定某一暫存器是否是volatile */
int (*readable_register)(...); /* 用於判定某一暫存器是否可讀 */
int (*writable_register)(...); /* 用於判定某一暫存器是否可寫 */
/* codec bias level */
int (*set_bias_level)(...); /* 偏置電壓配置函式 */
};/*
* Digital Audio Interface runtime data.
*
* Holds runtime data for a DAI.
*/
struct snd_soc_dai {
const char *name; /* dai的名字 */
struct device *dev; /* 裝置指標 */
/* driver ops */
struct snd_soc_dai_driver *driver; /* 指向dai驅動結構的指標 */
/* DAI runtime info */
unsigned int capture_active:1; /* stream is in use */
unsigned int playback_active:1; /* stream is in use */
/* DAI DMA data */
void *playback_dma_data; /* 用於管理playback dma */
void *capture_dma_data; /* 用於管理capture dma */
/* parent platform/codec */
union {
struct snd_soc_platform *platform; /* 如果是cpu dai,指向所繫結的平臺 */
struct snd_soc_codec *codec; /* 如果是codec dai指向所繫結的codec */
};
struct snd_soc_card *card; /* 指向Machine驅動中的crad例項 */
};/*
* Digital Audio Interface Driver.
*
* Describes the Digital Audio Interface in terms of its ALSA, DAI and AC97
* operations and capabilities. Codec and platform drivers will register this
* structure for every DAI they have.
*
* This structure covers the clocking, formating and ALSA operations for each
* interface.
*/
struct snd_soc_dai_driver {
/* DAI description */
const char *name; /* dai驅動名字 */
/* DAI driver callbacks */
int (*probe)(struct snd_soc_dai *dai); /* dai驅動的probe函式,由snd_soc_instantiate_card回撥 */
int (*remove)(struct snd_soc_dai *dai);
int (*suspend)(struct snd_soc_dai *dai); /* 電源管理 */
int (*resume)(struct snd_soc_dai *dai);
/* ops */
const struct snd_soc_dai_ops *ops; /* 指向本dai的snd_soc_dai_ops結構 */
/* DAI capabilities */
struct snd_soc_pcm_stream capture; /* 描述capture的能力 */
struct snd_soc_pcm_stream playback; /* 描述playback的能力 */
};struct snd_soc_dai_ops {
/*
* DAI clocking configuration, all optional.
* Called by soc_card drivers, normally in their hw_params.
*/
int (*set_sysclk)(...);
int (*set_pll)(...);
int (*set_clkdiv)(...);
/*
* DAI format configuration
* Called by soc_card drivers, normally in their hw_params.
*/
int (*set_fmt)(...);
int (*set_tdm_slot)(...);
int (*set_channel_map)(...);
int (*set_tristate)(...);
/*
* DAI digital mute - optional.
* Called by soc-core to minimise any pops.
*/
int (*digital_mute)(...);
/*
* ALSA PCM audio operations - all optional.
* Called by soc-core during audio PCM operations.
*/
int (*startup)(...);
void (*shutdown)(...);
int (*hw_params)(...);
int (*hw_free)(...);
int (*prepare)(...);
int (*trigger)(...);
/*
* For hardware based FIFO caused delay reporting.
* Optional.
*/
snd_pcm_sframes_t (*delay)(...);
};3. Codec的註冊
因為Codec驅動的程式碼要做到平臺無關性,要使得Machine驅動能夠使用該Codec,Codec驅動的首要任務就是確定snd_soc_codec和snd_soc_dai的例項,並把它們註冊到系統中,註冊後的codec和dai才能為Machine驅動所用。以WM8994為例,對應的程式碼位置:/sound/soc/codecs/wm8994.c,模組的入口函式註冊了一個platform driver:static struct platform_driver wm8994_codec_driver = {
.driver = {
.name = "wm8994-codec",
.owner = THIS_MODULE,
},
.probe = wm8994_probe,
.remove = __devexit_p(wm8994_remove),
};
module_platform_driver(wm8994_codec_driver);
static int __devinit wm8994_probe(struct platform_device *pdev)
{
return snd_soc_register_codec(&pdev->dev, &soc_codec_dev_wm8994,
wm8994_dai, ARRAY_SIZE(wm8994_dai));
}
static struct snd_soc_codec_driver soc_codec_dev_wm8994 = {
.probe = wm8994_codec_probe,
.remove = wm8994_codec_remove,
.suspend = wm8994_suspend,
.resume = wm8994_resume,
.set_bias_level = wm8994_set_bias_level,
.reg_cache_size = WM8994_MAX_REGISTER,
.volatile_register = wm8994_soc_volatile,
};
static struct snd_soc_dai_driver wm8994_dai[] = {
{
.name = "wm8994-aif1",
.id = 1,
.playback = {
.stream_name = "AIF1 Playback",
.channels_min = 1,
.channels_max = 2,
.rates = WM8994_RATES,
.formats = WM8994_FORMATS,
},
.capture = {
.stream_name = "AIF1 Capture",
.channels_min = 1,
.channels_max = 2,
.rates = WM8994_RATES,
.formats = WM8994_FORMATS,
},
.ops = &wm8994_aif1_dai_ops,
},
......
}
codec = kzalloc(sizeof(struct snd_soc_codec), GFP_KERNEL);
/* create CODEC component name */
codec->name = fmt_single_name(dev, &codec->id); codec->write = codec_drv->write;
codec->read = codec_drv->read;
codec->volatile_register = codec_drv->volatile_register;
codec->readable_register = codec_drv->readable_register;
codec->writable_register = codec_drv->writable_register;
codec->dapm.bias_level = SND_SOC_BIAS_OFF;
codec->dapm.dev = dev;
codec->dapm.codec = codec;
codec->dapm.seq_notifier = codec_drv->seq_notifier;
codec->dapm.stream_event = codec_drv->stream_event;
codec->dev = dev;
codec->driver = codec_drv;
codec->num_dai = num_dai;
/* register any DAIs */
if (num_dai) {
ret = snd_soc_register_dais(dev, dai_drv, num_dai);
if (ret < 0)
goto fail;
}
list_add(&codec->list, &codec_list);
snd_soc_instantiate_cards();
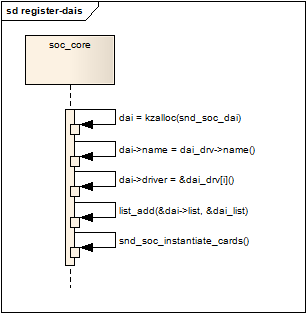
圖3.1 dai的註冊
4. mfd裝置
前面已經提到,codec驅動把自己註冊為一個platform driver,那對應的platform device在哪裡定義?答案是在以下程式碼檔案中:/drivers/mfd/wm8994-core.c。
WM8994本身具備多種功能,除了codec外,它還有作為LDO和GPIO使用,這幾種功能共享一些IO和中斷資源,linux為這種裝置提供了一套標準的實現方法:mfd裝置。其基本思想是為這些功能的公共部分實現一個父裝置,以便共享某些系統資源和功能,然後每個子功能實現為它的子裝置,這樣既共享了資源和程式碼,又能實現合理的裝置層次結構,主要利用到的API就是:mfd_add_devices(),mfd_remove_devices(),mfd_cell_enable(),mfd_cell_disable(),mfd_clone_cell()。
回到wm8994-core.c中,因為WM8994使用I2C進行內部暫存器的存取,它首先註冊了一個I2C驅動:
static struct i2c_driver wm8994_i2c_driver = {
.driver = {
.name = "wm8994",
.owner = THIS_MODULE,
.pm = &wm8994_pm_ops,
.of_match_table = wm8994_of_match,
},
.probe = wm8994_i2c_probe,
.remove = wm8994_i2c_remove,
.id_table = wm8994_i2c_id,
};
static int __init wm8994_i2c_init(void)
{
int ret;
ret = i2c_add_driver(&wm8994_i2c_driver);
if (ret != 0)
pr_err("Failed to register wm8994 I2C driver: %d\n", ret);
return ret;
}
module_init(wm8994_i2c_init);
static int wm8994_i2c_probe(struct i2c_client *i2c,
const struct i2c_device_id *id)
{
struct wm8994 *wm8994;
int ret;
wm8994 = devm_kzalloc(&i2c->dev, sizeof(struct wm8994), GFP_KERNEL);
i2c_set_clientdata(i2c, wm8994);
wm8994->dev = &i2c->dev;
wm8994->irq = i2c->irq;
wm8994->type = id->driver_data;
wm8994->regmap = regmap_init_i2c(i2c, &wm8994_base_regmap_config);
return wm8994_device_init(wm8994, i2c->irq);
}
/* Add the on-chip regulators first for bootstrapping */
ret = mfd_add_devices(wm8994->dev, -1,
wm8994_regulator_devs,
ARRAY_SIZE(wm8994_regulator_devs),
NULL, 0);
if (pdata) {
wm8994->irq_base = pdata->irq_base;
wm8994->gpio_base = pdata->gpio_base;
/* GPIO configuration is only applied if it's non-zero */
......
}
wm8994_irq_init(wm8994);
ret = mfd_add_devices(wm8994->dev, -1,
wm8994_devs, ARRAY_SIZE(wm8994_devs),
NULL, 0);
5. Codec初始化
Machine驅動的初始化,codec和dai的註冊,都會呼叫snd_soc_instantiate_cards()進行一次音效卡和codec,dai,platform的匹配繫結過程,這裡所說的繫結,正如Machine驅動一文中所描述,就是通過3個全域性連結串列,按名字進行匹配,把匹配的codec,dai和platform例項賦值給音效卡每對dai的snd_soc_pcm_runtime變數中。一旦繫結成功,將會使得codec和dai驅動的probe回撥被呼叫,codec的初始化工作就在該回調中完成。對於WM8994,該回調就是wm8994_codec_probe函式: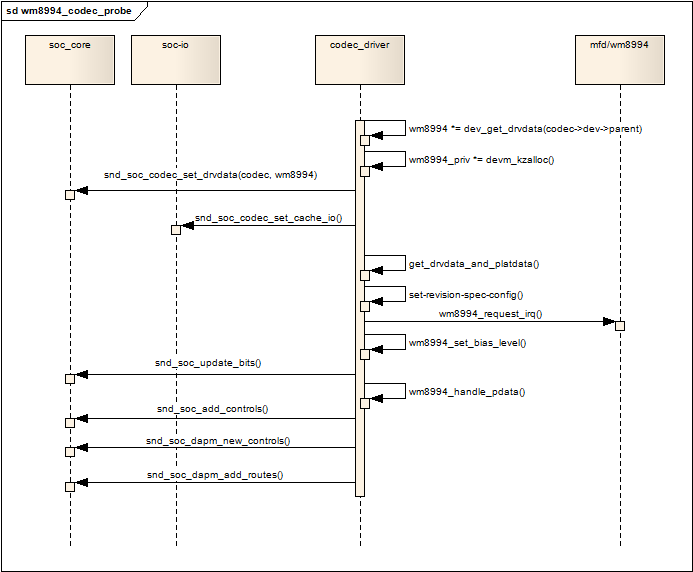
圖5.1 wm8994_codec_probe
- 取出父裝置的driver_data,其實就是上一節的wm8994結構變數,取出其中的regmap欄位,複製到codec的control_data欄位中;
- 申請一個wm8994_priv私有資料結構,並把它設為codec裝置的driver_data;
- 通過snd_soc_codec_set_cache_io初始化regmap io,完成這一步後,就可以使用API:snd_soc_read(),snd_soc_write()對codec的暫存器進行讀寫了;
- 把父裝置的driver_data(struct wm8994)和platform_data儲存到私有結構wm8994_priv中;
- 因為要同時支援3個晶片型號,這裡要根據晶片的型號做一些特定的初始化工作;
- 申請必要的幾個中斷;
- 設定合適的偏置電平;
- 通過snd_soc_update_bits修改某些暫存器;
- 根據父裝置的platform_data,完成特定於平臺的初始化配置;
- 新增必要的control,dapm部件進而dapm路由資訊;
至此,codec驅動的初始化完成。
5. regmap-io
我們知道,要想對codec進行控制,通常都是通過讀寫它的內部暫存器完成的,讀寫的介面通常是I2C或者是SPI介面,不過每個codec晶片暫存器的位元位組成都有所不同,暫存器地址的位元位也有所不同。例如WM8753的暫存器地址是7bits,資料是9bits,WM8993的暫存器地址是8bits,資料也是16bits,而WM8994的暫存器地址是16bits,資料也是16bits。在kernel3.1版本,核心引入了一套regmap機制和相關的API,這樣就可以用統一的操作來實現對這些多樣的暫存器的控制。regmap使用起來也相對簡單:- 為codec定義一個regmap_config結構例項,指定codec暫存器的地址和資料位等資訊;
- 根據codec的控制匯流排型別,呼叫以下其中一個函式,得到一個指向regmap結構的指標:
- struct regmap *regmap_init_i2c(struct i2c_client *i2c, const struct regmap_config *config);
- struct regmap *regmap_init_spi(struct spi_device *dev, const struct regmap_config *config);
- struct regmap *regmap_init_i2c(struct i2c_client *i2c, const struct regmap_config *config);
- 把獲得的regmap結構指標賦值給codec->control_data;
- 呼叫soc-io的api:snd_soc_codec_set_cache_io使得soc-io和regmap進行關聯;