
Yolov3之darknet下訓練與預測
阿新 • • 發佈:2019-01-09
一、製作資料集
二、修改配置檔案
本文以人手檢測為例配置(只有一個label:hand)
1、新增或修改data/hand.names檔案,此檔案記錄label,每行一個label(注意:對應於訓練資料的labels)
2、新增或修改cfg/hand.data檔案
classes= 1 # 自己資料集的類別數(不包含背景類)
train = /home/xxx/darknet/train.txt # train檔案的路徑
valid = /home/xxx/darknet/test.txt # test檔案的路徑
names = /home/xxx/darknet/data/hand.names 3、修改cfg/yolov3.cfg檔案
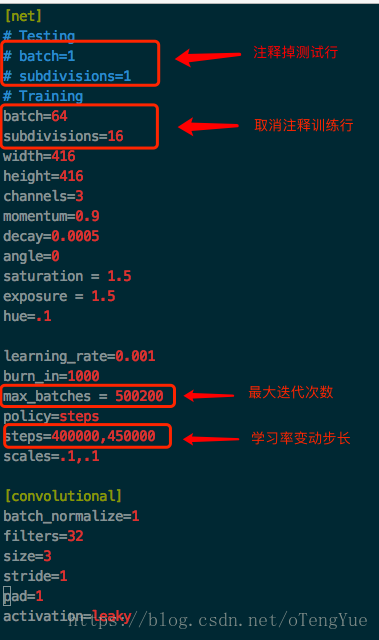
(1)基本修改
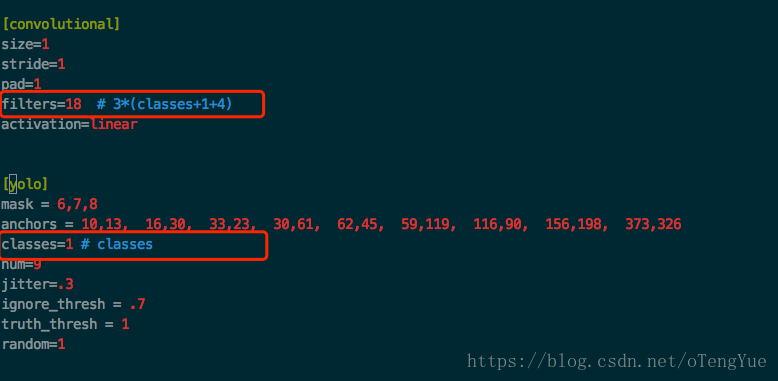
(2)修改3處,直接根據“yolo”關鍵字查詢定位,然後根據註釋修改
三、訓練
下載預訓練模型放在models資料夾下
終端訪問dartnet目錄,輸入一下命令:
# 從頭開始訓練
./darknet detector train cfg/hand.data cfg/yolov3_hand.cfg models/darknet53.conv.74
# 從某個權重快照繼續訓練
./darknet detector train cfg/hand.data 四、訓練日誌視覺化
主要根據日誌檔案生成loss和iou曲線,當然日誌需要訓練時候從定向來生成日誌檔案
五、預測過程
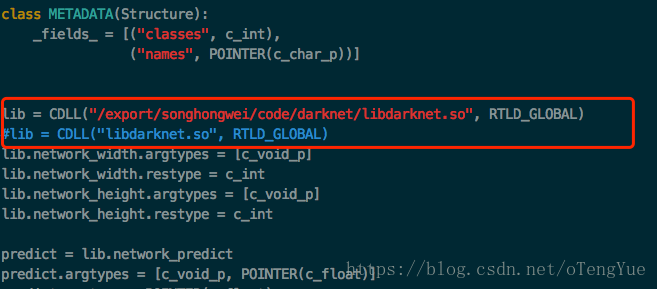
由於github上的master版本的python/darknet.py針對yolov3版本目前不太完善(截止2018-08-02),如果darknet採用master分支編譯的話,建議把yolov3分支的python/darknet.py替換掉master版本的該檔案。同時需要更改該指令碼中的libdarknet.so路徑為本機編譯後的路徑,不修改可能引起報錯
此處記錄備份一下當前版本的darknet.py檔案
from ctypes import *
import math
import random
def sample(probs):
s = sum(probs)
probs = [a/s for a in probs]
r = random.uniform(0, 1)
for i in range(len(probs)):
r = r - probs[i]
if r <= 0:
return i
return len(probs)-1
def c_array(ctype, values):
new_values = values.ctypes.data_as(POINTER(ctype))
return new_values
def array_to_image(arr):
import numpy as np
# need to return old values to avoid python freeing memory
arr = arr.transpose(2,0,1)
c = arr.shape[0]
h = arr.shape[1]
w = arr.shape[2]
arr = np.ascontiguousarray(arr.flat, dtype=np.float32) / 255.0
data = arr.ctypes.data_as(POINTER(c_float))
im = IMAGE(w,h,c,data)
return im, arr
class BOX(Structure):
_fields_ = [("x", c_float),
("y", c_float),
("w", c_float),
("h", c_float)]
class DETECTION(Structure):
_fields_ = [("bbox", BOX),
("classes", c_int),
("prob", POINTER(c_float)),
("mask", POINTER(c_float)),
("objectness", c_float),
("sort_class", c_int)]
class IMAGE(Structure):
_fields_ = [("w", c_int),
("h", c_int),
("c", c_int),
("data", POINTER(c_float))]
class METADATA(Structure):
_fields_ = [("classes", c_int),
("names", POINTER(c_char_p))]
#lib = CDLL("/home/pjreddie/documents/darknet/libdarknet.so", RTLD_GLOBAL)
lib = CDLL("libdarknet.so", RTLD_GLOBAL)
lib.network_width.argtypes = [c_void_p]
lib.network_width.restype = c_int
lib.network_height.argtypes = [c_void_p]
lib.network_height.restype = c_int
predict = lib.network_predict
predict.argtypes = [c_void_p, POINTER(c_float)]
predict.restype = POINTER(c_float)
set_gpu = lib.cuda_set_device
set_gpu.argtypes = [c_int]
make_image = lib.make_image
make_image.argtypes = [c_int, c_int, c_int]
make_image.restype = IMAGE
get_network_boxes = lib.get_network_boxes
get_network_boxes.argtypes = [c_void_p, c_int, c_int, c_float, c_float, POINTER(c_int), c_int, POINTER(c_int)]
get_network_boxes.restype = POINTER(DETECTION)
make_network_boxes = lib.make_network_boxes
make_network_boxes.argtypes = [c_void_p]
make_network_boxes.restype = POINTER(DETECTION)
free_detections = lib.free_detections
free_detections.argtypes = [POINTER(DETECTION), c_int]
free_ptrs = lib.free_ptrs
free_ptrs.argtypes = [POINTER(c_void_p), c_int]
network_predict = lib.network_predict
network_predict.argtypes = [c_void_p, POINTER(c_float)]
reset_rnn = lib.reset_rnn
reset_rnn.argtypes = [c_void_p]
load_net = lib.load_network
load_net.argtypes = [c_char_p, c_char_p, c_int]
load_net.restype = c_void_p
do_nms_obj = lib.do_nms_obj
do_nms_obj.argtypes = [POINTER(DETECTION), c_int, c_int, c_float]
do_nms_sort = lib.do_nms_sort
do_nms_sort.argtypes = [POINTER(DETECTION), c_int, c_int, c_float]
free_image = lib.free_image
free_image.argtypes = [IMAGE]
letterbox_image = lib.letterbox_image
letterbox_image.argtypes = [IMAGE, c_int, c_int]
letterbox_image.restype = IMAGE
load_meta = lib.get_metadata
lib.get_metadata.argtypes = [c_char_p]
lib.get_metadata.restype = METADATA
load_image = lib.load_image_color
load_image.argtypes = [c_char_p, c_int, c_int]
load_image.restype = IMAGE
rgbgr_image = lib.rgbgr_image
rgbgr_image.argtypes = [IMAGE]
predict_image = lib.network_predict_image
predict_image.argtypes = [c_void_p, IMAGE]
predict_image.restype = POINTER(c_float)
def classify(net, meta, im):
out = predict_image(net, im)
res = []
for i in range(meta.classes):
res.append((meta.names[i], out[i]))
res = sorted(res, key=lambda x: -x[1])
return res
def detect(net, meta, image, thresh=.5, hier_thresh=.5, nms=.45):
im = load_image(image, 0, 0)
num = c_int(0)
pnum = pointer(num)
predict_image(net, im)
dets = get_network_boxes(net, im.w, im.h, thresh, hier_thresh, None, 0, pnum)
num = pnum[0]
if (nms): do_nms_obj(dets, num, meta.classes, nms);
res = []
for j in range(num):
for i in range(meta.classes):
if dets[j].prob[i] > 0:
b = dets[j].bbox
res.append((meta.names[i], dets[j].prob[i], (b.x, b.y, b.w, b.h)))
res = sorted(res, key=lambda x: -x[1])
free_image(im)
free_detections(dets, num)
return res
def detect_numpy(net, meta, image, thresh=.5, hier_thresh=.5, nms=.45):
im, arr = array_to_image(image)
num = c_int(0)
pnum = pointer(num)
predict_image(net, im)
dets = get_network_boxes(net, im.w, im.h, thresh, hier_thresh, None, 0, pnum)
num = pnum[0]
if (nms): do_nms_obj(dets, num, meta.classes, nms);
res = []
for j in range(num):
for i in range(meta.classes):
if dets[j].prob[i] > 0:
b = dets[j].bbox
res.append((meta.names[i], dets[j].prob[i], (b.x, b.y, b.w, b.h)))
res = sorted(res, key=lambda x: -x[1])
free_detections(dets, num)
return res
if __name__ == "__main__":
#net = load_net("cfg/densenet201.cfg", "/home/pjreddie/trained/densenet201.weights", 0)
#im = load_image("data/wolf.jpg", 0, 0)
#meta = load_meta("cfg/imagenet1k.data")
#r = classify(net, meta, im)
#print r[:10]
net = load_net("cfg/tiny-yolo.cfg", "tiny-yolo.weights", 0)
meta = load_meta("cfg/coco.data")
import scipy.misc
import time
'''
t_start = time.time()
for ii in range(100):
r = detect(net, meta, 'data/dog.jpg')
print(time.time() - t_start)
print(r)
image = scipy.misc.imread('data/dog.jpg')
for ii in range(100):
scipy.misc.imsave('/tmp/image.jpg', image)
r = detect(net, meta, '/tmp/image.jpg')
print(time.time() - t_start)
print(r)
'''
image = scipy.misc.imread('data/dog.jpg')
t_start = time.time()
for ii in range(100):
r = detect_numpy(net, meta, image)
print(time.time() - t_start)
print(r)
人手檢測預測程式碼:examples/yolov3_detector_hand.py
#coding=utf-8
import cv2
import sys, os
sys.path.append('/export/songhongwei/code/darknet/python/')
import scipy.misc
import darknet as dn
from PIL import Image
class Yolov3HandDetector:
hand_cfg_path = "/export/songhongwei/code/darknet/cfg/yolov3_hand.cfg"
hand_weights_path = "/export/songhongwei/code/darknet/backup/yolov3_hand_150000.weights"
hand_data_path = "/export/songhongwei/code/darknet/cfg/hand.data"
def __init__(self):
# Darknet
self.net = dn.load_net(self.hand_cfg_path, self.hand_weights_path, 0)
self.meta = dn.load_meta(self.hand_data_path)
def img_cv2pil(self, cv_im):
pil_im = Image.fromarray(cv2.cvtColor(cv_im, cv2.COLOR_BGR2RGB))
return pil_im
def detect_hand(self,cv_im):
im = self.img_cv2pil(cv_im)
im = scipy.misc.fromimage(im)
res_infos = dn.detect_numpy(self.net, self.meta, im)
bbox_map = {}
for label, probability, bbox in res_infos:
if label not in bbox_map:
bbox_map[label] = []
bbox_map[label].append([int(bbox[0]-bbox[2]/2),int(bbox[1]-bbox[3]/2),int(bbox[0]+bbox[2]/2),int(bbox[1]+bbox[3]/2)])
return bbox_map
if __name__ == '__main__':
handDetector = Yolov3HandDetector()
pic_path = '/export/songhongwei/code/darknet/data/tmp_hand.jpg'
cv_im = cv2.imread(pic_path)
bbox_map = handDetector.detect_hand(cv_im)
print(bbox_map)輸出:
{'hand': [[155, 180, 218, 265], [239, 241, 302, 291]]}注:每個中括號內數字代表格式[top_left_x, top_left_y, bottom_right_x, bottom_right_y]