中科之旅-------PIC16F18855 SPI初始化
阿新 • • 發佈:2019-01-10
void PIN_MANAGER_Initialize(void)
{
LATB = 0x03; //RB4 init value 0 0000 0010 MOSI MISO SS = 0 ,SLCK = 1;
LATA = 0x0;
//LATC = 0x1;
LATC = 0x61;
WPUA = 0xF0;
// WPUB = 0xE9;//1001
WPUB = 0xE4;//0100 RB2 pull up
WPUC = 0xE0;
ANSELA = 0xFF;
ANSELB = 0x00; //RB4 digital out put
// ANSELC = 0xE5;
ANSELC = 0x25;
TRISB = 0xE4; //RB4 output reset pin RB0 spi_cs = input RB2 MISO = input 1110 0101
TRISC = 0xBE;
TRISA = 0xFF;
/*
LATB = 0x0;
WPUE = 0x8;
LATA = 0x0;
LATC = 0x7F; //rc6,rc7
WPUA = 0xFF;
WPUB = 0xFF;
WPUC = 0xFF;
ANSELA = 0xFF;
ANSELB = 0xFF;
ANSELC = 0x00;
TRISB = 0xFF;
TRISC = 0x80;//rc6,rc7 output
TRISA = 0xF0;
*/
bool state = GIE;
GIE = 0;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0x00; // unlock PPS
//RC0PPS = 0x10; //RC0->EUSART:TX;
// RXPPSbits.RXPPS = 0x11; //RC1->EUSART:RX;
RC3PPS = 0x16; //RC3->MSSP2:SDA2;
RC4PPS = 0x17; //RC4->MSSP2:SCL2;
SSP2DATPPSbits.SSP2DATPPS = 0x14; //RC3->MSSP2:SDA2;
SSP2CLKPPSbits.SSP2CLKPPS = 0x13; //RC4->MSSP2:SCL2;
//SSP1DATPPSbits.SSP1DATPPS
RC6PPS = 0x10; //RC6->EUSART:TX;
RXPPSbits.RXPPS = 0x17; //RC7->EUSART:RX;
//spi config
RB0PPS = 0x00;
RB1PPS = 0x14; //spi_sck
SSP1CLKPPSbits.SSP1CLKPPS = 0x09; //rb1
SSP1DATPPSbits.SSP1DATPPS = 0x0A; //miso
RB3PPS = 0x15; //mosi
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0x01; // lock PPS
GIE = state;
}
mssp初始化
void SPI_Initialize(void)
{
// Set the SPI module to the options selected in the User Interface
// BF RCinprocess_TXcomplete; UA dontupdate; SMP Sample At Middle; P stopbit_notdetected; S startbit_notdetected; R_nW write_noTX; CKE Active to Idle; D_nA lastbyte_address;
SSP1STAT = 0x80;
// SSPEN enabled; WCOL no_collision; SSPOV no_overflow; CKP Idle:Low, Active:High; SSPM FOSC/4;
SSP1CON1 = 0x30;
SSP1ADD = 0x00;
}
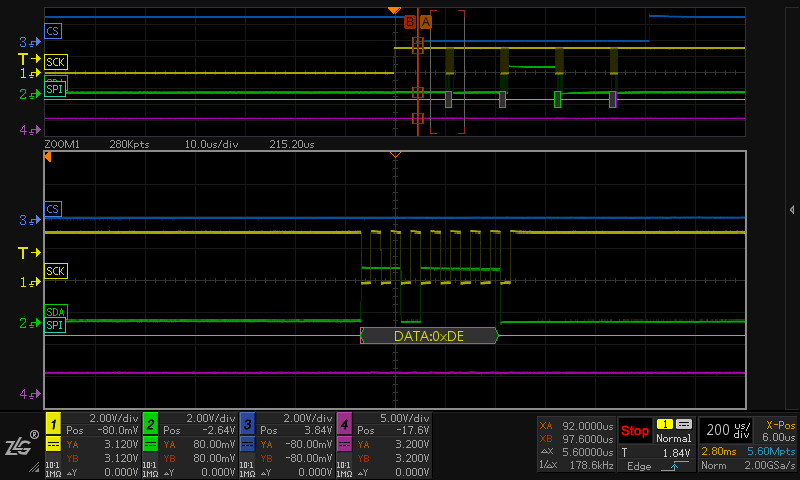
有幾個要點,首先是SPI的時序要根據slave來,然後CS管腳要自己去設定,注意clk的頻率。特別是CS在一次通訊中要一直拉低直到本次通訊結束
放個波形