
ROS學習筆記(一)VirtualBox、ubuntu、ROS安裝與配置
ros有幾種版本,ubuntu也有對應的不少版本,有哪些版本代號看這裡——ubuntu版本代號。建議在準備安裝之前去ros官網看一下哪個版本的ros-ubuntu套裝適合你,根據自己的選擇下載安裝對應的ros和ubuntu
我這裡的版本是ROS Melodic Morenia和ubuntu18.04
一.安裝virtualbox
一個賊好用的虛擬機器軟體,去官網直接下載正版就行,不需要破解。下載好之後點選新建新建一個虛擬機器。
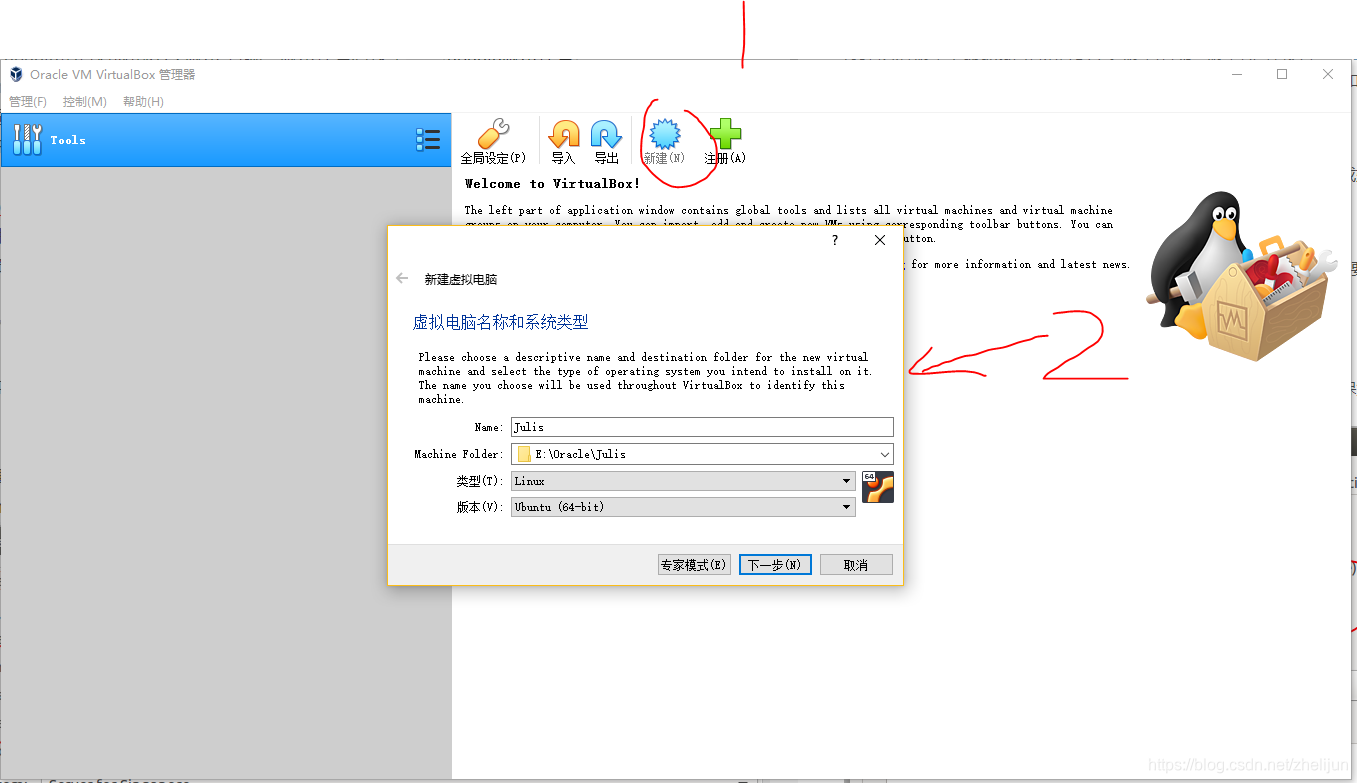 安裝位置自己確定一下,型別版本也確定一下。點選下一步
安裝位置自己確定一下,型別版本也確定一下。點選下一步
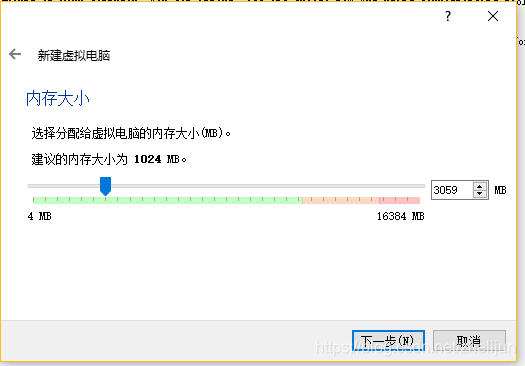
設定ram大小,這個自行設定,到後面也可以改。這裡我定了約3G,點選下一步——建立——下一步——下一步
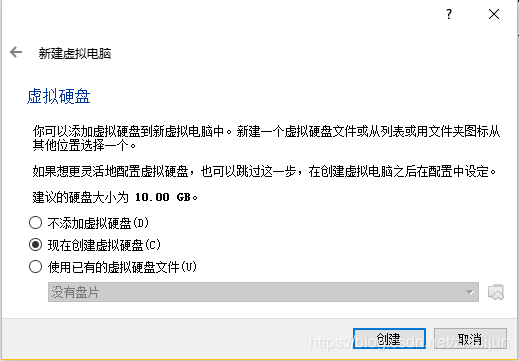
硬碟分配根據自己的要求選擇,給不夠的話後面系統更新一下裝幾個包就滿了,我這裡為了方便直接給了50G。建議多給。
硬碟分配好後虛擬機器就新建好了。
二.安裝ubuntu
去unbuntu官網下載一個ubuntu iso檔案放在任意位置(免費正版),然後執行剛剛新建的虛擬機器,碟片定位到ubuntu iso檔案,也是一路continue到安裝結束。
三.安裝ROS
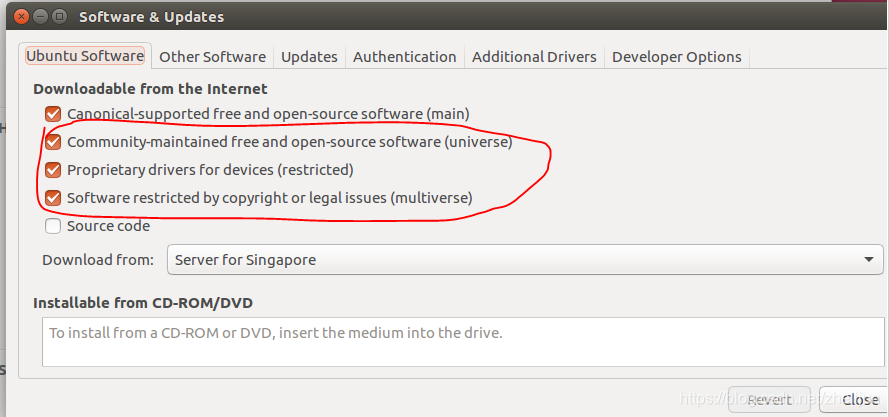
3.1 檢查ubuntu更新設定
搜尋Software&Updates——ubuntu software確保第234選項是打勾的
3.2 設定好ros下載地址
開啟terminal 輸入以下命令然後回車
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
輸入密碼候什麼都不發生就是沒問題

手打命令列是很煩的,直接複製貼上是不行的,所以要設定一下。在虛擬機器工具欄那裡裝置——安裝增強功能,接著裝置——共享貼上板——主機到虛擬機器重啟之後就能複製貼上命令行了。
3.3 設定好你的server金鑰
同上,輸入回車
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.4正式開始安裝ROS(一系列的輸入命令列然後回車,滿屏的程式碼會讓你有種自己是軟體大神的錯覺)
- 檢查更新Debian package,如果需要更新就搜尋執行software updater根據提示更新
sudo apt update
- 下載安裝ros包
sudo apt install ros-melodic-desktop-full
- 初始化rosdep
sudo rosdep init
rosdep update
- 接下來是環境配置,方便以後每次開啟shell避免重複冗餘工作。不然你每次開shell跑ros都需要跑一下
source /opt/ros/<distro>/setup.bash,這裡的< distro >指的是ros版本號。
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 至此,ros安裝完畢,ros官網還建議安裝以下工具包
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
四.測試
命令列執行
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
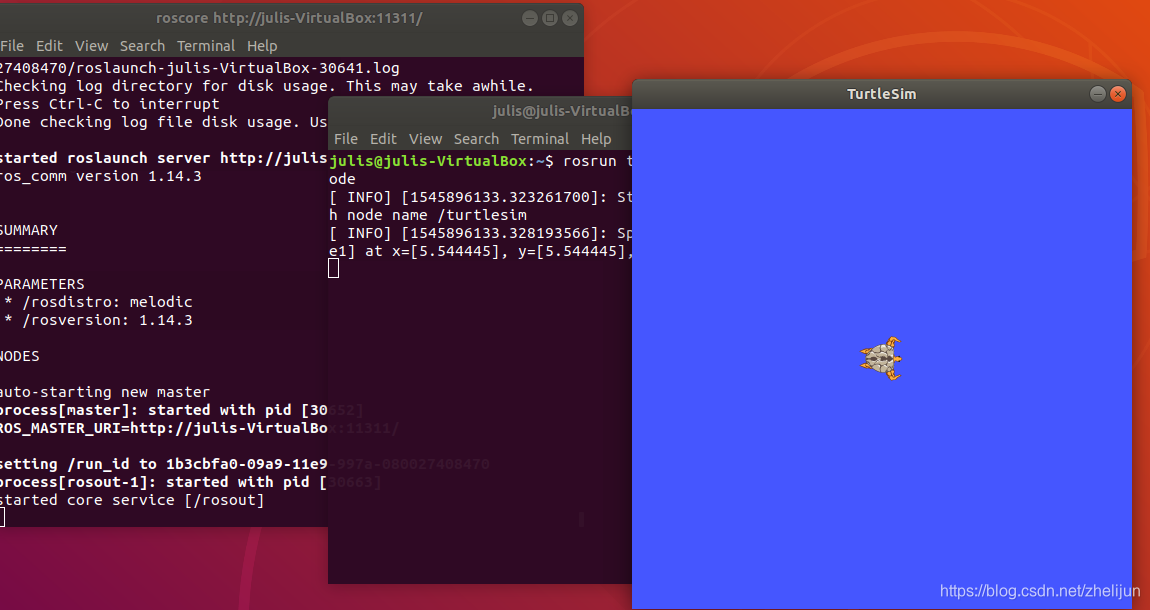
roscore
執行完roscore之後新開啟terminal命令列執行
rosrun turtlesim turtlesim_node
此時彈出一個小烏龜視窗,然後新建terminal繼續命令列執行
rosrun turtlesim turtle_teleop_key
把點選把滑鼠停留在最後一個terminal視窗,按鍵盤方向鍵看能否控制小烏龜運動。可以的話ros安裝成功