
詳談判斷點在多邊形內的七種方法(最全面) hdu1756 hrbust1429 為例
這幾天在學計算幾何,學到點定位的判斷點在多邊形內,書上提到了三種方法,但是有些方法的程式碼不全。於是網上找了找,又發現更多判斷的方法,一時興起決定學習一下,看看到底有多少種,結果一個大坑。。。
網上好多介紹的不詳細(特別是轉角法,最後還是google出來的),而且有些方法叫不同的名字,有點難搞啊,花了我一天多的時間。。TAT
話不多說,下面分享一下。有些方法我會介紹清楚但不會畫圖詳解,希望大家自己畫圖體會。
涉及到的題目
hdu1756
就是裸題,多邊形點順時針給出(有的演算法會強調給出順序)
射線法
時間複雜度:O(n) 適用範圍:任意多邊形
個人認為是非常不錯的演算法(不需考慮精度誤差和多邊形點給出的順序),可以作為第一選擇。
演算法思想:
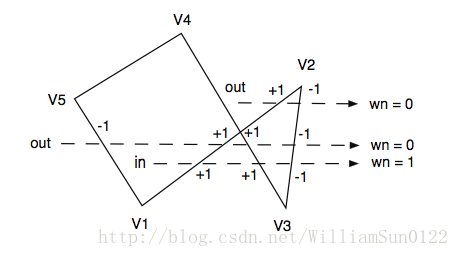
以被測點Q為端點,向任意方向作射線(一般水平向右作射線),統計該射線與多邊形的交點數。如果為奇數,Q在多邊形內;如果為偶數,Q在多邊形外。計數的時候會有一些特殊情況,如圖

圖片已經把特殊情況和演算法實現說的很清楚了,下面我直接貼程式碼,具體可看程式碼註釋。
const double eps = 1e-6;
const double PI = acos(-1);
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return hdu1756-射線法程式碼
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const double eps = 1e-6;
const double PI = acos(-1);
int n,m;
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){}
//向量+
Point operator +(const Point &b)const
{
return Point(x+b.x,y+b.y);
}
//向量-
Point operator -(const Point &b)const
{
return Point(x-b.x,y-b.y);
}
//點積
double operator *(const Point &b)const
{
return x*b.x + y*b.y;
}
//叉積
//P^Q>0,P在Q的順時針方向;<0,P在Q的逆時針方向;=0,P,Q共線,可能同向或反向
double operator ^(const Point &b)const
{
return x*b.y - b.x*y;
}
}polygon[105];
typedef Point Vector;
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-射線法
bool InPolygon(Point P)
{
bool flag = false;
Point P1,P2; //多邊形一條邊的兩個頂點
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[i];
P2 = polygon[j];
if(OnSegment(P1,P2,P)) return true; //點在多邊形一條邊上
if( (dcmp(P1.y-P.y)>0 != dcmp(P2.y-P.y)>0) && dcmp(P.x - (P.y-P1.y)*(P1.x-P2.x)/(P1.y-P2.y)-P1.x)<0)
flag = !flag;
}
return flag;
}
int main()
{
while(~scanf("%d",&n))
{
for(int i=1;i<=n;i++) scanf("%lf %lf",&polygon[i].x,&polygon[i].y);
Point test;
scanf("%d",&m);
while(m--)
{
scanf("%lf %lf",&test.x,&test.y);
if(InPolygon(test)) printf("Yes\n");
else printf("No\n");
}
}
return 0;
}
角度和判斷法
時間複雜度:O(n) 適用範圍:任意多邊形
感覺這個方法和之後要介紹的轉角法類似,個人感覺轉角法就是這個方法的優化變形。個人非常不推薦這個演算法,最好就是不用。這個演算法對精度的要求很高(會造成很大精度誤差),不強調多邊形點給出順序,我用這個演算法沒過hdu1756。
演算法思想:
連線被測點與多邊形所有頂點所形成的所有角的角度和在精度範圍內等於
不推薦,所以就不畫圖了。
const double eps = 1e-6;
const double PI = acos(-1);
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
//前一個判斷點Q在P1P2直線上 後一個判斷在P1P2範圍上
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-角度和判斷法
//精度要求高 最好不用
bool InPolygon(Point P)
{
double angle = 0;
Point P1,P2; //多邊形一條邊的兩個頂點
Vector V1,V2; //以被測點為原點 P1 P2與P形成的向量
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[i];
P2 = polygon[j];
if(OnSegment(P1,P2,P)) return true; //點在多邊形一條邊上
V1 = P1-P;
V2 = P2-P;
double res = atan2(V2.y,V2.x)-atan2(V1.y,V1.x);
res = abs(res);
if(dcmp(res-PI)>0) res = 2*PI-res;
angle += res;
}
return dcmp(2*PI-angle)==0;
}atan2(y,x)計算y/x的反tan值,在[
hdu1756的該方法的程式碼沒過,就不貼了。
轉角法
時間複雜度:O(n) 適用範圍:任意多邊形
個人感覺是O(n)演算法的第二推薦,該演算法本來對精度要求較高,之後會有一個改進讓其不用考慮精度誤差,不過該演算法要強調多邊形點給出的順序。
一般部落格都以多邊形正向即逆時針介紹,我這裡也主要介紹逆時針,但hdu1756是順時針給出,我會在括號中介紹一下順時針(其實本質是一樣的),順時針具體在程式碼註釋中提一下。不會畫圖,希望大家看了思想自己畫圖體會一下。
演算法思想:
轉角法非常簡單,按照多邊形頂點逆時針順序,從P點到頂點Vi分別做連線,其中αi為Vi和Vi+1之間的夾角。其中α角度逆時針為正,順時針為負,這樣所有到頂點做連線之間夾角和為(環繞數)0,這點P在多邊形外部,否則在內部。(感覺和角度和判斷法本質一樣,加了個方向)
(順時針就是角度順時針為正,逆時針為負)

直接環繞數的推導會需要用到反三角函式,這樣即會耗時又會造成較大的精度誤差,所以這裡有一個優化。
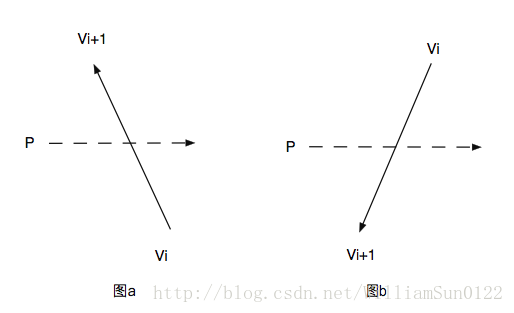
從P點向右做射線R,如果邊從射線R下方跨到上方,那麼穿越+1,如果從上方跨到下方,則是-1。最終和為wn環繞數。如下圖所示:
(寫部落格的時候才發現其實本質不就是射線嗎,不過理解後代碼會感覺寫的比射線簡單)
這種方法不必去計算射線和邊的交點,但需要判斷點P和邊的左右關係,而且對於方向向上和向下的邊的判斷規則不同。對於方向向上的邊,如果穿過射線,那麼P是在有向邊的左側;方向向下的邊如果穿過射線,那麼P在有向邊的右邊(意思是說判斷點P與邊的關係,而不是相對座標系內位置)。
這裡有一點要注意,如下圖
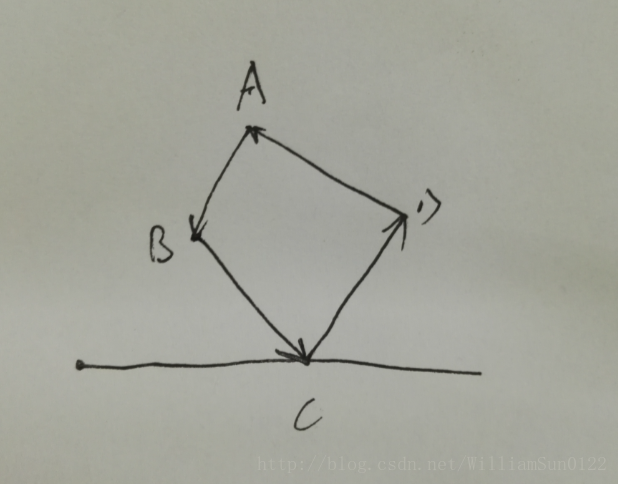
這裡射線經過了BC和CD並穿過C點,但是要計算兩次,一次+1一次-1,程式碼中會有體現。
const double eps = 1e-6;
const double PI = acos(-1);
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
//前一個判斷點Q在P1P2直線上 後一個判斷在P1P2範圍上
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-轉角法(多邊形點順時針給出)
bool InPolygon(Point P)
{
int wn = 0;
Point P1,P2; //多邊形一條邊的兩個頂點
Vector V1,V2; //被測點與P1分別於P2形成的向量
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[j]; //順時針中前一點
P2 = polygon[i]; //順時針中後一點
if(OnSegment(P1,P2,P)) return true; //點在多邊形一條邊上
V1 = P2-P1;
V2 = P-P1;
int k = dcmp(V1^V2); //用於判斷被測點在有向邊的左右
int d1 = dcmp(P1.y-P.y); //用於判斷向上還是向下穿過
int d2 = dcmp(P2.y-P.y);
//V1在V2的順時針方向即測試點在有向邊左邊 並且有向邊向上穿過
if(k>0 && d1<=0&&d2>0) wn--;
//V1在V2的逆時針方向即測試點在有向邊右邊 並且有向邊向下穿過
if(k<0 && d1>0&&d2<=0) wn++;
//上面wn+和wn- 一個允許起點在射線上另一個允許終點在射線上 最後特殊情況就會算兩次
//逆時針的wn+和wn-自己畫圖體會一下
}
//不為0即在多邊形內 不管是正還是負
return wn!=0;
}hdu1756-轉角法程式碼
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const double eps = 1e-6;
const double PI = acos(-1);
int n,m;
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){}
//向量+
Point operator +(const Point &b)const
{
return Point(x+b.x,y+b.y);
}
//向量-
Point operator -(const Point &b)const
{
return Point(x-b.x,y-b.y);
}
//點積
double operator *(const Point &b)const
{
return x*b.x + y*b.y;
}
//叉積
//P^Q>0,P在Q的順時針方向;<0,P在Q的逆時針方向;=0,P,Q共線,可能同向或反向
double operator ^(const Point &b)const
{
return x*b.y - b.x*y;
}
}polygon[105];
typedef Point Vector;
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-轉角法(多邊形點順時針給出)
bool InPolygon(Point P)
{
int wn = 0;
Point P1,P2; //多邊形一條邊的兩個頂點
Vector V1,V2; //被測點與P1分別於P2形成的向量
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[j]; //順時針中前一點
P2 = polygon[i]; //順時針中後一點
if(OnSegment(P1,P2,P)) return true; //點在多邊形一條邊上
V1 = P2-P1;
V2 = P-P1;
int k = dcmp(V1^V2);
int d1 = dcmp(P1.y-P.y);
int d2 = dcmp(P2.y-P.y);
if(k>0 && d1<=0&&d2>0) wn--; //測試點在有向邊左邊 有向邊向上穿過
if(k<0 && d1>0&&d2<=0) wn++; //測試點在有向邊右邊 有向邊向下穿過
}
return wn!=0;
}
int main()
{
while(~scanf("%d",&n))
{
for(int i=1;i<=n;i++) scanf("%lf %lf",&polygon[i].x,&polygon[i].y);
Point test;
scanf("%d",&m);
while(m--)
{
scanf("%lf %lf",&test.x,&test.y);
if(InPolygon(test)) printf("Yes\n");
else printf("No\n");
}
}
return 0;
}
改進弧長法
時間複雜度:O(n) 適用範圍:任意多邊形
該演算法感覺是轉角法的另一種優化,也解決了傳統轉角法的精度問題,也要求多邊形點給出的順序。
演算法思想:
以被測點O為座標原點,將平面劃分為4個象限,對每個多邊形頂點P[i],計算其所在的象限,然後順序訪問多邊形的各個頂點P[i],分析P[i]和P[i+1],有下列三種情況:
1. P[i+1]在P[i]的下一象限。此時弧長和加
2. P[i+1]在P[i]的上一象限。此時弧長和減
3. P[i+1]在Pi的相物件限。利用叉積res=OP[i]xOP[i+1]計算OP[i]與OP[i+1]的關係。
若f=0,OP[i]與OP[i+1]共線,點在多邊形邊上;若f<0,OP[i]在OP[i+1]逆時針方向,弧長和減
有點累,逆時針的程式碼自己畫圖推一推吧,
//判斷點P在多邊形內-改進弧長法(多邊形點順時針給出)
//用這個還不如用上一個轉角法
bool InPolygon(Point P)
{
int q1,q2,ans=0;
Point P1,P2;
Vector V1,V2;
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[j];
P2 = polygon[i];
V1 = P1-P;
V2 = P2-P;
if(OnSegment(P1,P2,P)) return true;
q1 = V1.x>0 ? (V1.y>0 ? 0:3) : (V1.y>0 ? 1:2);
q2 = V2.x>0 ? (V2.y>0 ? 0:3) : (V2.y>0 ? 1:2);
int g = (q2-q1+4)%4;
if(g==1) ans--; //在上一象限
if(g==3) ans++; //在下一象限
if(g==2) dcmp(V1^V2)>0 ? (ans-=2) : (ans+=2); //在相物件限
}
return ans!=0;
}hdu1756-改進弧長法程式碼
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const double eps = 1e-6;
const double PI = acos(-1);
int n,m;
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){}
//向量+
Point operator +(const Point &b)const
{
return Point(x+b.x,y+b.y);
}
//向量-
Point operator -(const Point &b)const
{
return Point(x-b.x,y-b.y);
}
//點積
double operator *(const Point &b)const
{
return x*b.x + y*b.y;
}
//叉積
//P^Q>0,P在Q的順時針方向;<0,P在Q的逆時針方向;=0,P,Q共線,可能同向或反向
double operator ^(const Point &b)const
{
return x*b.y - b.x*y;
}
}polygon[105];
typedef Point Vector;
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-改進弧長法
bool InPolygon(Point P)
{
int q1,q2,ans=0;
Point P1,P2;
Vector V1,V2;
for(int i=1,j=n;i<=n;j=i++)
{
P1 = polygon[j];
P2 = polygon[i];
V1 = P1-P;
V2 = P2-P;
if(OnSegment(P1,P2,P)) return true;
q1 = V1.x>0 ? (V1.y>0 ? 0:3) : (V1.y>0 ? 1:2);
q2 = V2.x>0 ? (V2.y>0 ? 0:3) : (V2.y>0 ? 1:2);
int g = (q2-q1+4)%4;
if(g==1) ans--; //在上一象限
if(g==3) ans++; //在下一象限
if(g==2) dcmp(V1^V2)>0 ? (ans-=2) : (ans+=2);
}
return ans!=0;
}
int main()
{
while(~scanf("%d",&n))
{
for(int i=1;i<=n;i++) scanf("%lf %lf",&polygon[i].x,&polygon[i].y);
Point test;
scanf("%d",&m);
while(m--)
{
scanf("%lf %lf",&test.x,&test.y);
if(InPolygon(test)) printf("Yes\n");
else printf("No\n");
}
}
return 0;
}
叉積(點線)判斷法
時間複雜度:O(n) 適用範圍:凸多邊形
我覺得該演算法只作為了解吧。
對於多邊形(正向,即逆時針),如果一個點它的所有有向邊的左邊,那麼這個點一定在多邊形內部。利用叉積正好可以判斷點與給定邊的關係,即點是在邊的左邊右邊還是邊上。
這裡說一下,(P叉乘Q)P^Q>0說明P在Q的順時針方向,<0說明P在Q的逆時針方向,=0說明P和Q共線。
沒有程式碼,我覺得只要一下就行了,不推薦。
面積法
時間複雜度:O(n)(但是時間應該會比之前的O(n)的長一點)
適用範圍:凸多邊形
瞭解即可,有精度要求,強調多邊形點給出的方向(逆時針)。
演算法思想:
如果點在多邊形內部或者邊上,那麼點與多邊形所有邊組成的三角形面積和等於多邊形面積。多邊形的面積可以用叉積計算即連線座標原點和各頂點形成向量,所有向量叉積的0.5的和即為多邊形面積。不過計算面積是會有一定誤差的,需要設定精度的誤差範圍。
沒有程式碼。
二分
時間複雜度:O(
強掉多邊形給出的方向。
這種方法以hrbust1429為例。 題目連結
這道題的題意是已知構成凸多邊形A的n個點的座標,和點集B的m個點的座標,求這B的m個點是否都在凸多邊形A內(嚴格內部,就是點不能在多邊形邊上)。
演算法思想:
1. 選擇多邊形其中一個點為起點,連線其它點作射線。
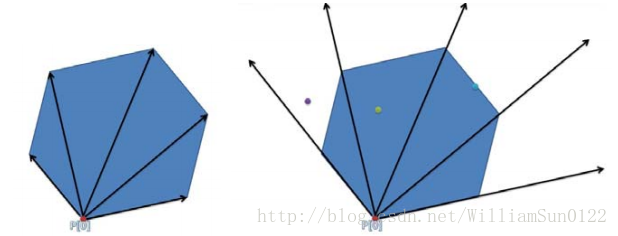
2. 判斷給定的點是否在所有射線包圍的區域之內,即判斷給定點是否在最左側射線的左邊,或者在最右側射線的右邊。
3. 如果在射線包圍的區域之內,選擇構成最兩側的射線的點為left和right,則mid = (left+right)/2,連線給頂點和起點作射線,判斷該射線在mid點和起點的哪一邊,不斷迴圈,如此用二分法最後求出給定點所在的三角形區域,由此確定了除起點外的一條邊。
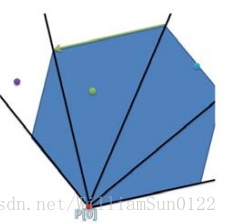
4. 判斷給定點在這條邊的左方還是右方,由此判斷給定點是否在三角形區域內,也就是是否在多邊形內。
//判斷點P在多邊形內-O(logn) 順時針給出
bool InPolygon(Point P)
{
if(dcmp((polygon[n]-polygon[1])^(P-polygon[1]))<=0 || dcmp((polygon[2]-polygon[1])^(P-polygon[1]))>=0) //判斷在不在區域外
return false;
int l=2,r=n,mid;
//找出所在三角形區域的左邊的頂點
while(l<r)
{
mid = (l+r+1)>>1;
if(dcmp((polygon[mid]-polygon[1])^(P-polygon[1]))<=0) l=mid;
else r = mid-1;
}
//判斷在多邊形外或線上
if(dcmp((polygon[l+1]-polygon[l])^(P-polygon[l]))>=0) return false;
return true;
}hrbust1429
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const double eps = 1e-6;
const double PI = acos(-1);
const int maxn = 1e5+5;
int n,m;
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){}
//向量+
Point operator +(const Point &b)const
{
return Point(x+b.x,y+b.y);
}
//向量-
Point operator -(const Point &b)const
{
return Point(x-b.x,y-b.y);
}
//點積
double operator *(const Point &b)const
{
return x*b.x + y*b.y;
}
//叉積
//P^Q>0,P在Q的順時針方向;<0,P在Q的逆時針方向;=0,P,Q共線,可能同向或反向
double operator ^(const Point &b)const
{
return x*b.y - b.x*y;
}
}polygon[maxn];
typedef Point Vector;
//三態函式,判斷兩個double在eps精度下的大小關係
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判斷點Q是否在P1和P2的線段上
bool OnSegment(Point P1,Point P2,Point Q)
{
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判斷點P在多邊形內-O(logn) 順時針給出
bool InPolygon(Point P)
{
if(dcmp((polygon[n]-polygon[1])^(P-polygon[1]))<=0 || dcmp((polygon[2]-polygon[1])^(P-polygon[1]))>=0)
return false;
int l=2,r=n,mid;
while(l<r)
{
mid = (l+r+1)>>1;
if(dcmp((polygon[mid]-polygon[1])^(P-polygon[1]))<=0) l=mid;
else r = mid-1;
}
if(dcmp((polygon[l+1]-polygon[l])^(P-polygon[l]))>=0) return false;
return true;
}
int main()
{
while(~scanf("%d",&n))
{
for(int i=1;i<=n;i++) scanf("%lf %lf",&polygon[i].x,&polygon[i].y);
Point test;
bool flag = true;
scanf("%d",&m);
while(m--)
{
scanf("%lf %lf",&test.x,&test.y);
if(!flag) continue;
if(!InPolygon(test)) flag = false;
}
if(flag) printf("YES\n");
else printf("NO\n");
}
return 0;
}
最後總結一下O(n)演算法的選擇:個人感覺最優先考慮射線,其次是轉角,其它的能不用最好不用。
如果對你有所幫助請給個贊,沒有也請不要踩。。。QAQ
相關推薦
詳談判斷點在多邊形內的七種方法(最全面) hdu1756 hrbust1429 為例
這幾天在學計算幾何,學到點定位的判斷點在多邊形內,書上提到了三種方法,但是有些方法的程式碼不全。於是網上找了找,又發現更多判斷的方法,一時興起決定學習一下,看看到底有多少種,結果一個大坑。。。 網上好多介紹的不詳細(特別是轉角法,最後還是google出來的),
判斷點是否在一個任意多邊形內幾種方法
1.多邊形面積演算法(非凹多邊形,凹多邊形需要切割為凸多邊形): 設要檢測的點為P點。用P點連線多邊形各頂點,假如P點在多邊形以內,則頂點與P組成的三角形正好填充此多邊形。反之,則不能。此時使用多邊形面積計算公式,使P點作為參考點(a,b,c,.......,n為
Leetcode|Longest Palindromic Substring(最長迴文的幾種方法)(Manacher演算法)
Given a string S, find the longest palindromic substring in S. You may assume that the maximum length of S is 1000, and there ex
JAVA:定時器的三種方法(詳細註解)
第一種: 建立一個thread,然後讓它在while迴圈裡一直執行著,通過sleep方法來達到定時任務的效果,程式碼如下: public class Task1 { public static void main(String[] args) { /
SpringBoot給容器中註冊元件的四種方法(簡易版)
本文介紹的方法比較簡潔,需要有Spring基礎 方法一:包掃描+註解 1.配置類,標明註解掃描的範圍 //告訴Spring這是一個配置類 @Configuration //註解所掃描的範圍,類似於spring配置檔案的 context:component-scan
讀取視訊幀的幾種方法(自己整理)
1、第一種方法 #include "opencv2/opencv.hpp" using namespace cv; int main(int, char**) { VideoCapture cap(
canvas中將y軸方向反轉的一種方法(有弊端)
先將原點移動到左下 context.translate(0, canvas.height); 然後,利用座標縮放,縮放y軸倍數為-1,這樣子y軸就會“縮回去”,從而達到反轉y軸的效果,如下: context.scale(1, -1); 但是這樣如
Android自定義Dialog對話方塊的幾種方法(精簡版)
自定義對話方塊是經常使用的功能,我們常用的彈窗操作,除了使用popwindow就是使用dialog來實現,這兩種元件都支援之定義佈局和功能來滿足我們個性化的需求,也可以不採用自定義而直接使用系統封裝好的api來實現功能。今天簡單總結下在使用dialog做彈窗功能
矩陣相乘的三種方法(java實現)
package cqychen.algorithm.ch01; /** * 本程式由cqychen編寫,主要是矩陣相乘的三種方法, 常規方法,一般的分治演算法,strassen演算法,這裡就不編寫泛型的相關方法了,麻煩。 * 後續會繼續跟進演算法導論相應章節
CSS清除浮動的幾種方法(有例項)
首先我們要說一下浮動帶給我們的問題:如果父元素沒有設定固定高度那麼當子元素設定浮動時父元素不會被撐開,很明顯這會影響我們的佈局 效果如下: 1、第一種方法:after偽元素(推薦使用) 給浮動元素的父元素新增類名clearfix並設定clearfix的css /*第一種
Node.js debug //迅速除錯bug的倆種方法 (詳細全面!)方法一
Node Js 有倆個方法可以輕易的debug 在這篇文章中 我還加入了很多小技巧更加方便 這一個方法直接在command line中執行 1. node inspect 在 command line中 在command line 中 輸入 node i
js清除瀏覽器快取的幾種方法(專案總結)
以前很少關注這方面的問題,直達我們的技術經理找我們說要換框架,為什麼換框架呢,因為快取的問題,原來的專案是用版本號作為重新整理的依據的。因為微信 公眾號上有這樣一個機制,使用版本好的話,有時做不到及時重新整理,所以就用了vue.js,因為它有這樣的功能就是如果某個檔案裡面的
Ubuntu 建立開機啟動指令碼的一種方法(rc.local)
# 1、編輯/etc/rc.local如:sudo vim /etc/rc.local 在 exit 0之前新增指令碼程式碼如:sh /ect/ifconfig.sh rc.local: 1 #!/bin/sh -e 2 # 3 # rc.local 4 #
Android Studio匯入SlidingMenu的兩種方法(超詳細)
方法1 匯入aar 順道解析一下在Android studio中,有兩種方式: 一種是jar包,一種是帶資原始檔的aar包。 jar: 只包含了class檔案與清單檔案 ,不包含資原始檔,如圖片等所有res中的檔案。 aar: 包含jar包和資原始檔,如圖片等所
[Android] Android 定時任務實現的三種方法(以SeekBar的進度自動實現為例)
orien nta callback 間隔 end ++ tar protect bundle [Android] Android 定時任務實現的三種方法(以SeekBar的進度自動實現為例) 一、采用Handler與線程的sleep(long)方法 二、采用H
安裝Windows和Linux雙系統方法(以Windows7和Ubuntu16.04為例)
用UltraISO製作Ubuntu 或 Debian 的U盤啟動盤後,在機器用U盤啟動時有時會報這個錯誤:failed to load ldlinux.c32 這是UltraISO的問題,需要換燒錄軟體,請換燒錄軟體: linux:mkusb windows
sparkstreaming和kafka整合的兩種方式(最全)
-1,基於接收者的方法 運算元:KafkaUtils.createStream 方法:PUSH,從topic中去推送資料,將資料推送過來 API:呼叫的Kafka高階API 效果:SparkStreaming中的Receivers,恰好Kafka有釋出/
delphi導出數據至Excel的七種方法
number bcd pos component cep inf 安裝 windows 入庫 delphi導出數據至Excel的七種方法 2012-01-17 00:00 一;delphi 快速導出excel uses ComObj,clipbrd; fu
C#獲取當前路徑的七種方法
filename ces cut lease rect 包括 name system file //1.獲取模塊的完整路徑。 string path1 = System.Diagnostics.Process.GetCurrentProcess().MainModul
判斷圖連通的三種方法——dfs,bfs,並查集
題目 pan closed 節點 out esp cli div find Description 如果無向圖G每對頂點v和w都有從v到w的路徑,那麽稱無向圖G是連通的。現在給定一張無向圖,判斷它是否是連通的。 Input 第一行有2個整數n和m(0 <