
機器人作業系統入門:二(中科大&&重德智慧)
阿新 • • 發佈:2019-01-13
目錄
一 roscpp
1.Client library 是提供ROS程式設計的庫
CL語言包有兩種:c++和py。roscpp 執行效率較高,rospy 開發效率較高。
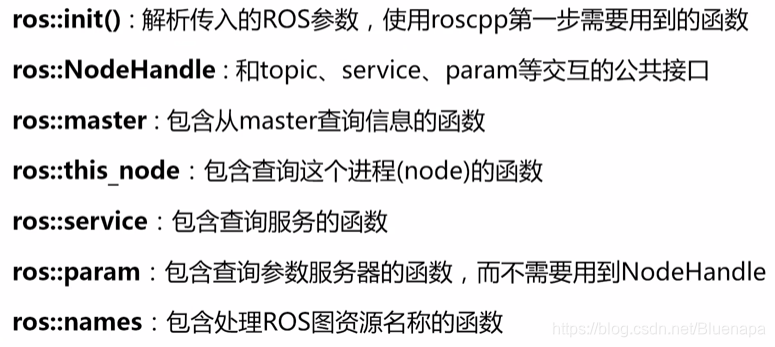
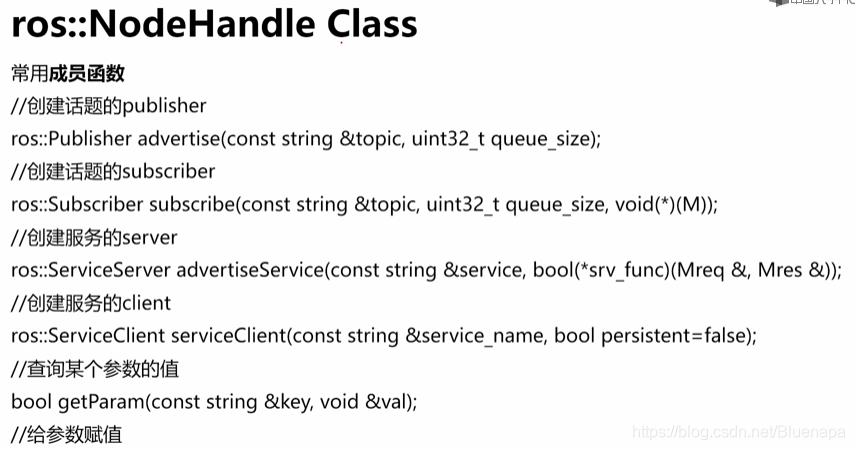
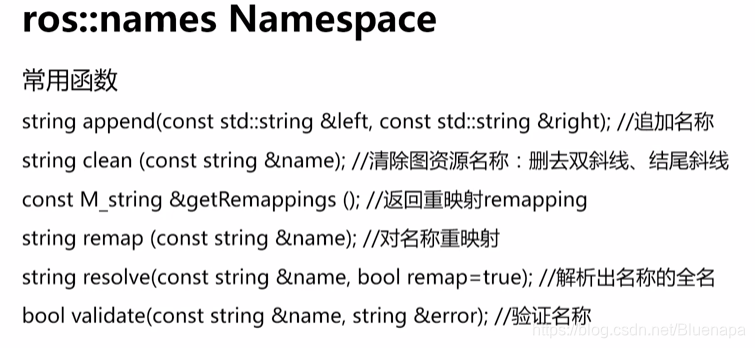
roscpp 是和topic service param timer 互動的一個介面。
roscpp包含的API簡介: http://docs.ros.org/api/roscpp/html/

2. 一個簡單的topic Demo
兩個node,一個釋出模擬的GPS訊息,一個接收處理。
步驟:
- 建立package
- 自定義的訊息格式 msg
- 釋出者的原始碼 talker.cpp
- 接收者的原始碼 listener.cpp
- 修改CMakeLists 和 xml檔案
1.建立package
cd ~/catkin_ws/src
catkin_create_pkg topic_demo roscpp rospy std_msgs2.自定義訊息格式msg
cd topic_demo/ && mkdir msg
cd msg && vim gps.msggps.msg 檔案內容格式如下:
float32 y
float32 x
string state
經過編譯過後會出現對應的標頭檔案 ~/catkin_ws/devel/include/topic_demo/gps.h
3.釋出者的原始碼 talker.cpp
#include <ros/ros.h>
#include <topic_demo/gps.h>
int main(int argc,char** argv)
{
ros::init(argc,argv,"talker"); //解析引數,命名節點(talker是節點名稱)
ros::NodeHandle nh; //建立控制代碼,例項化node
topic_demo::gps msg; //建立msg訊息
msg.x=1.0;
mag.y=1.0;
msg.state="working";
/********建立publisher,advertise 模板函式的第一個引數gps_info是釋出的topic的名稱,第二個引數是先發布到一個佇列中(類似快取?),隨發隨收,所以佇列的長度設為1。********/
ros::Publisher pub= nh.advertise<topic_demo::gps>("gps_info",1);
/*********接下來要週期性迴圈釋出訊息*************/
ros::Rate loop_rate(1.0); //定義迴圈釋出的頻率,1代表1hz
while(ros::ok())
{
msg.x=1.03* msg.x;
msg.y=1.03* msg.y;
ROS_INFO( "GPS:x=%f,y=%f",msg.x,msg.y); //列印輸出當前msg
pub.publish(msg); //釋出訊息
loop_rate.sleep();
}
return 0;
}4.接收者的原始碼 listener.cpp
#include <ros/ros.h>
#incldue <topic_demo/gps.h>
#include <std_msgs/Float32.h>
void gpsCallback(const topic_demo::gps::ConstPtr & msg) //常指標
{
std_msgs::Float32 distance; //ros自帶的Float32型別,為結構體
distance.data=sqrt(pow(msg->x,2),pow(msg->y,2));
ROS_INFO("Distance=%f,state-=%s",distance.data,msg->state.c_str()); //列印輸出
}
int main(int argc,char** argv)
{
ros::init(argc,argv,"listener"); //解析引數,命名節點
ros::NodeHandle n;
/**********建立subscriber************/
/********第一個引數是監聽的topic的名稱,第二個引數是訊息佇列的長度,第三個是回撥函式(指標),用來處理監聽到的資訊*******/
ros::Subscriber sub=n.subscribe("gps_info",1,gpsCallback);
ros::spin(); //反覆檢視佇列是否有訊息,然後呼叫當前可觸發的回撥函式,系統呈阻塞狀態
return 0;
}
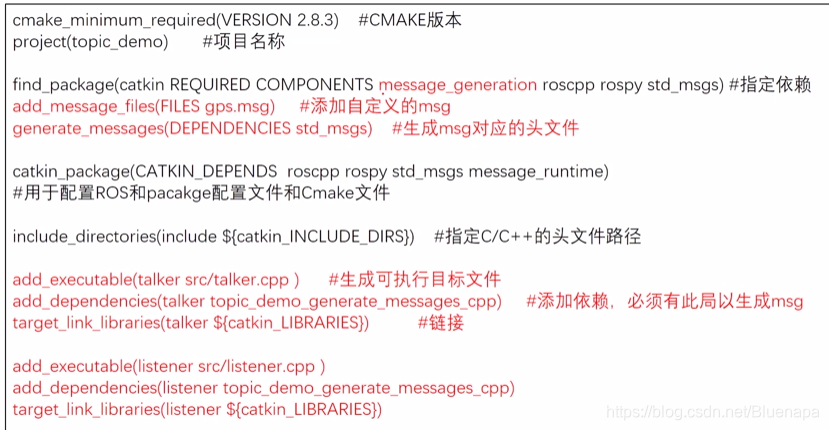
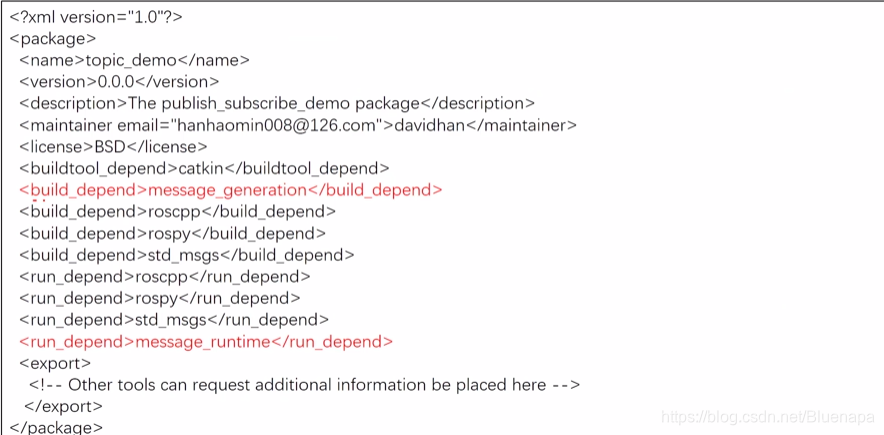
5.改動CMakeLists 和 xml
改動 CMakeLists
改動 xml
6.編譯執行
程式碼工作均已完成,接下來 編譯 catkin_make 執行 rosrun
3. 一個簡單的ServiceDemo
兩個node,一個釋出請求(格式自定義,本例中是姓名和年齡),一個接收處理並返回資訊(本例中是一個字串)。
步驟:
- 建立package
- 定義srv
- 響應者的原始碼 server.cpp
- 請求者的原始碼 client.cpp
- 修改CMakeLists 和 package.xml檔案
1.建立package
cd ~/catkin_ws/src
catkin_create_pkg service_demo roscpp rospy std_msgs2.定義srv
cd service_demo/
mkdir srv
vim Greeting.srv
編譯後會在指定檔案下出現標頭檔案,具體如下

3.響應者的原始碼 server.cpp
#include <ros/ros.h>
#include <service_demo/Greeting.h>
//返回值為布林型,表示函式是否被正確執行
bool handle_function(service::demo::Greeting::Request & req, service::demo::Greating::Response &res)
{
ROS_INFO("Request from %s with age %d", req.name.c_str(),req.age); //列印請求資訊
res.feedback=“Hi” + req.name +“I am server!”; //處理請求,結果寫入reponse
return ture; //返回 true ,正確處理請求
}
int main()
{
ros::init(argc,argv, "greetings_server"); //解析引數,命名節點
ros::NodeHandle nh; //建立控制代碼,例項化node
/********提供服務,第一個引數是服務名稱,第二個引數是處理函式(函式指標)*********/
ros::ServcieServer service = nh.advertiseService(“greetings”, handle_function)
ros::spin();
return 0;
}
4.請求者的原始碼
#include <ros/ros.h>
#include <service_demo/Greeting.h>
int main(int argc, char** argv)
{
ros::init(argc,argv,"greetings_server");
ros::NodeHandle nh;
/*******這步是建立client,傳送的請求的型別是servcie_demo::Greeting,函式的引數“greetings”就是要傳送到的sevice********/
ros::ServiceClient client= nh.serviceClient<servcie_demo::Greeting>("greetings");
service_demo::Greeting srv;
srv.request.name = "HAN" ;
srv.request.age = 20;
/*********client.call返回的布林值變數也是handle_function返回的結果*************/
if(client.call(srv))
{
ROS_INFO("Feedback from server:%s",srv.response.feedback);
}
else
{
ROS_ERROR("Failed to call service greeting.");
return 1;
}
return 0;
}
5.修改 CMakeList 和 xml
類比之前的。。。
4. 一個簡單的Param Demo
同一個功能兩套API:ros::param 和 ros::NodeHandle
param_demo.cpp ()在原始碼中設定引數
#incldue <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc,argv,"greetings_server");
ros::NodeHandle nh;
int parameter1,parameter2,parameter3,parameter4,parameter5;
//獲取引數的三種方法, param 是namespace
ros::param::get("param1",parameter1); //把第一個引數(key)的值賦給第二個引數
nh.getParam("param2",parameter2); //把第一個引數(key)的值賦給第二個引數
nh.param("param3",parameter3,123); //如果沒有找到param3,就賦給預設值123
//設定引數
ros::param::set("param4",parameter4)
nh.setParam("param5",parameter5)
//檢查引數是否存在
ros::param::has("param5")
nh.hasParam("param6");
//刪除引數
ros::param::del("param5");
ros::deleteParam("param6");
return 0;
}另一種設定引數的方法 launch檔案法
param_demo_cpp.launch
<launch>
<!--Param標籤設定單個引數-->
<param name="param1" value="1" />
<param name="param2" value="2" />
<param name="robot_description" command="$(find xacro)/xacro.py $(find demo)/urdf/robot.urdf" />
<!--rosparam標籤設定多個引數-->
<rosparam>
param3:3
param4:4
param10:helloworld!
</rosparam>
<rosparam file= "$(find param_demo)/config/myparam.yaml" command= "load" />
<node pkg= "param_demo" type="param_demo" name="param_demo" output= "screen" />
</launch>