
機器人技術基礎實驗之matlab DH修正引數
阿新 • • 發佈:2019-01-13
(機器人技術基礎實驗matlab DH修正引數求旋轉矩陣描述和計算X-Y-Z固定角描述)
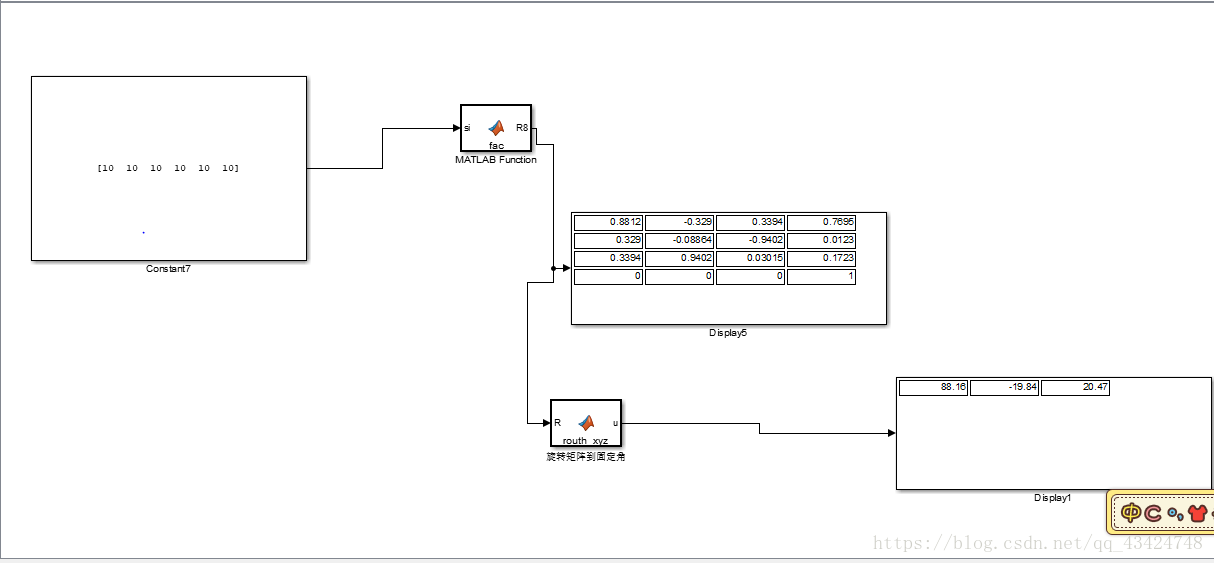
simulink效果圖:
DH引數到旋轉矩陣程式碼
function R8 = fac(si)
i=1;
R8=eye(4,4);
DH=[0,0,0,si(1)*pi/180;pi/2,0,0.2155,si(2)*pi/180;pi,0.408,0.2155,si(3)*pi/180;pi,0.376,0.1215,si(4)*pi/180;-pi/2,0,0.103,si(5)*pi/180;pi/2,0,0,si(6)*pi/180];
while(i<7)
R(1,1)=cos(DH(i,4 旋轉矩陣到X-Y-Z固定角程式碼
function u=routh_xyz(R)
u=zeros(3,1);
r11=R(1,1);
r12=R(1,2);
r13=R(1,3);
r21=R(2,1);
r22=R(2,2);
r23=R(2