
給你一臺大疆無人機,你能用來做點啥?(三)------傾斜攝影建模基礎
在做正射影像或者傾斜建模過程中會涉及到一些攝影測量和傾斜建模有關一些知識,順便查了一些資料,然後覺得很有必要,就稍微系統羅列了一下,在最後還提供了幾個建模航線為大家作為參考,希望對大家有幫助。
一、重疊度、航線彎曲、像片旋角。
1.1航向重疊率

沿同一航線的相鄰像片重疊部分的長度與像片邊長之比。簡而言之,就是同一條線路,照片與照片之間的重疊部分。
1.2旁向重疊度

沿兩條相鄰航線所攝的相鄰像片重疊部分的長度與像片長度之比。簡而言之,就是線路與線路之間照片的重疊部分。
製作正射影像圖,對於照片的重疊率是有一定的要求的,照片至少有60%的航向和旁向重疊率,這樣能保證三張照片有重疊部分。這是對於相對於地形較為平坦的地區,當地形起伏較大時,在設定重疊率時還要提高,才能保證像片立體量測與拼接的需要
1.3航線彎曲
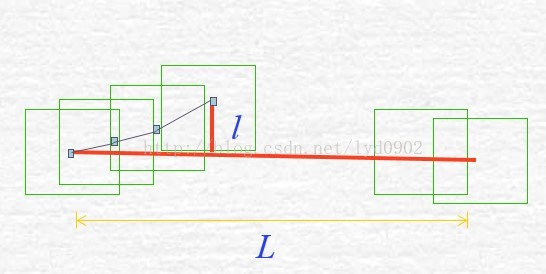
在航拍過程中,由於無人機穩定程度不如有人駕駛飛機,易受高空風力影響,會導致航線漂移,飛行的軌跡不再像傳統的航空攝影沿直線飛行,會產生航線彎曲現象。所謂航線彎曲就是把一條航線的航攝像片根據地物影像拼接起來,各張像片的主點連線不在一條直線上,而呈現為彎彎曲曲的折線
航線彎曲度:航線最大彎曲向量與航線長度之比的百分數。要求航線彎曲度<3%
1.4像片旋角
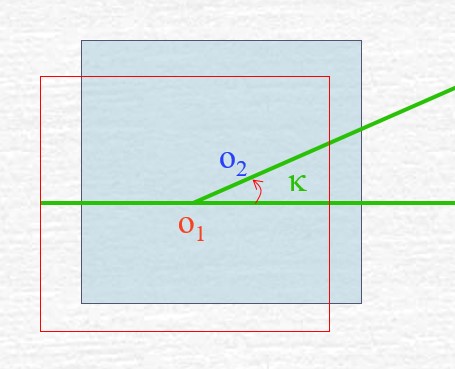
一張像片上相鄰主點連線與同方向框標連線間的夾角。要求像片旋角<6°
敲黑板!敲黑板!敲黑板!
總結一下:
1) 像片重疊率建議60%以上,地形起伏越大重疊率越高。
2) 航線彎曲度<3%。
3) 像片旋角<6°
另外自動建模軟體建立三維模型對影像重疊度的要求高於一般的航攝製圖任務,需要影像至少有70%的航向和旁向重疊度。
二、重疊率設定優化方案
2.1起飛點在任務區地面,航攝平坦開闊的區域
此種情況為常規的航攝飛行,可以按照要求的航高和重疊度直接設定航線,完成飛行。
2.2起飛點在任務區地面,航攝高樓密集的城區
直接按照要求設定重疊度,地面可以滿足重疊度要求,但是隨著樓層升高,樓頂的影像重疊度則會降低,樓頂重疊度不足會導致建成的三維模型有漏洞或者明顯拉伸,成果質量較差。所以需要根據任務區最高的樓房高度重新計算重疊度,作為飛行航攝設定的重疊度
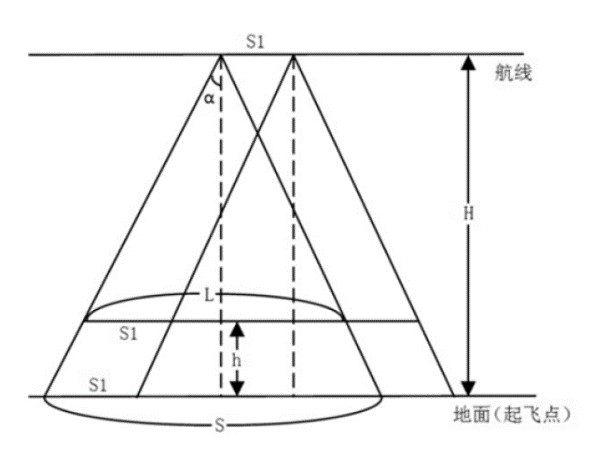
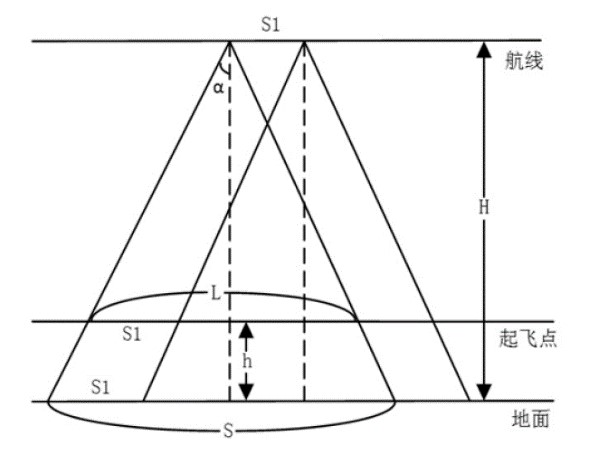
地面起飛航攝高層建築
已知H 為航攝飛行高度,h 為樓房高度,α為像幅角。
相片對應實地的長(寬):S=2H tanα
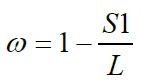
W為飛行設定的重疊度:
,則樓頂處的重疊度為:
所以,若要保證航攝區域內所有地物的重疊度達到,則設定的地面重疊度W 為:
2.3起飛點高於任務區地面,航攝平坦地區
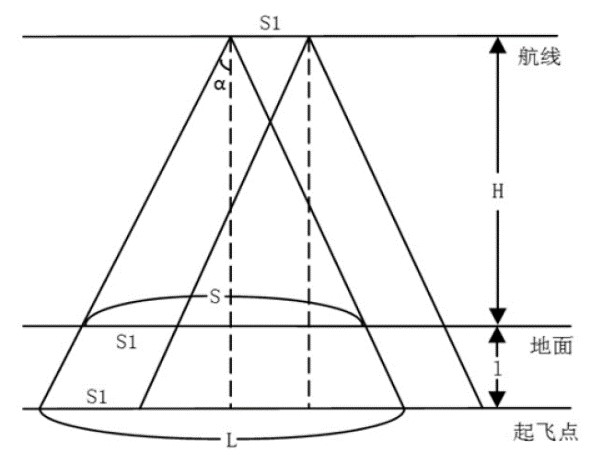
高處起飛航攝平坦地區
已知起飛點高度為h,α為像幅角,要求航攝飛行高度為H,地面重疊度為W,則場高需要設定為H-h。
則在高處起飛所需要設定的重疊度為:
2.4起飛點低於任務區地面,航攝平坦地區
低處起飛航攝平坦地區
已知起飛點低於任務區地面高度為l,α為像幅角,要求航攝飛行高度為H,地面重疊度為W,則場高需要設定為H+l。
則重疊度設定為:
實際問題分析:
假設任務要求航攝高度200 米,地面重疊度為75%,起飛點低於任務區地面50 米。
則由計算公式可知:
所以,在低於任務區地面的位置起飛需要將場高設定為250 米,重疊度設定為80%,則可以滿足航攝高度200 米和地面重疊度為75%的要求。
三、解析度、比例尺、DPI、模型精度及換算關係
3.1解析度、比例尺、DPI、
空間解析度:空間解析度又稱地面解析度,前者是從影象的分解能力而言,亦稱影象解析度;後者是從前者對應的地面而言。簡言之,空間解析度是在遙感影象上能詳細區分最小地物的尺寸。遙感影象地面解析度,是指每個像元的大小在地面上對應的實際範圍,即地表與一個像元大小相當的尺寸,以TM影像為例,影像中一個像元代表地面30米
影像解析度=地圖距離/畫素
比例尺=地圖距離/實際距離
地面解析度=實際距離/畫素
每英寸點數 (DPI)=畫素/地圖距離
比例尺=1:(地面解析度*(DPI/0.245))
3.2傾斜模型精度
傾斜攝影的模型精度一般是照片解析度的三倍,就是根據照片生成的正射影像的地面解析度的三倍,如果生成的正射影像的解析度是3cm/畫素,那模型精度基本就是8-15cm。為什麼不是9釐米精度呢?而是一個範圍,原因在於地面無論如何會有起伏,加上受風等不可控制因素影響,沒法保證照片的解析度是固定的。
公式:傾斜攝影模型精度=同工程正射解析度的三倍
3.3換算關係
其實很多人在看了上面的知識後,基本都會換算了。這裡只是舉例說明
以1:1000的比例尺,對應的地面解析度是指地圖上1cm對應地表1000cm,
1釐米=0.3937008英寸
按照大疆無人機拍的72dpi來算,一英寸包含72畫素,那麼1釐米包含0.3937008*72=28.3464576畫素
得到對應關係為28.3464576對應地圖上1000cm
解析度為:1000/28.3464576=35.277776649
1:1000的比例尺對應的地面解析度為35.2釐米,接近0.36米
那航拍模型的精度也就要求0.36米,對應的航拍解析度就是0.12米。就是說航拍建模的時候拍攝的照片要能達到12cm精度以上。
四、建模航線參考
這裡只為傾斜攝影建模的航線提供參考。
模型質量好與精的區別一定在於硬體嗎?不存在的。。。。
4.1 “S”形路線

這裡說的S路線,指按常規五條路線設定,這也是單鏡頭無人機採集傾斜攝影模型資料最穩妥的路線。分別是正射航線一條,東南西北四個方向個一條。這種方式比較適合拍攝大面積的場景。
4.2環形航線
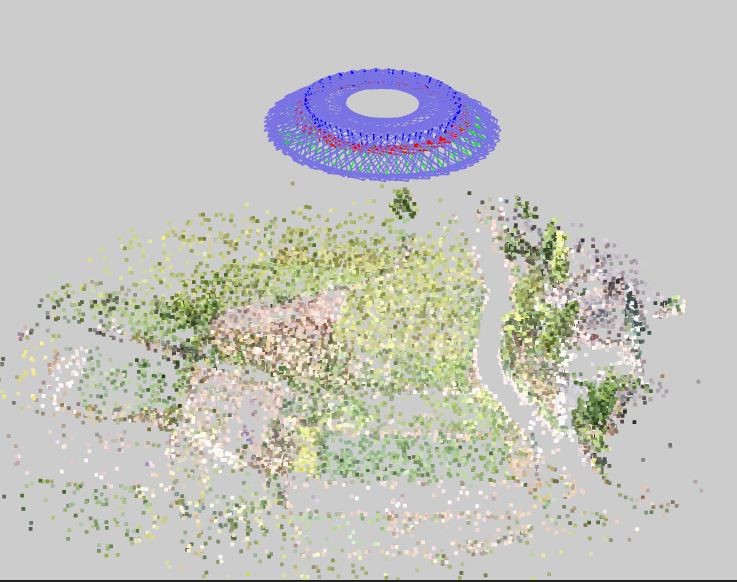
環繞,顧名思義就是繞著要建模的區域做環形飛行拍攝,並讓相機對準被建模的主體進行拍攝。這種航線方法特別適合對單棟建築或者標誌物的拍攝,三維重建效果好,同時所需的影象也很少,以大疆為例,如果該區域或建築物不是太大,一塊的電池就能滿足。
4.3“高低組合”
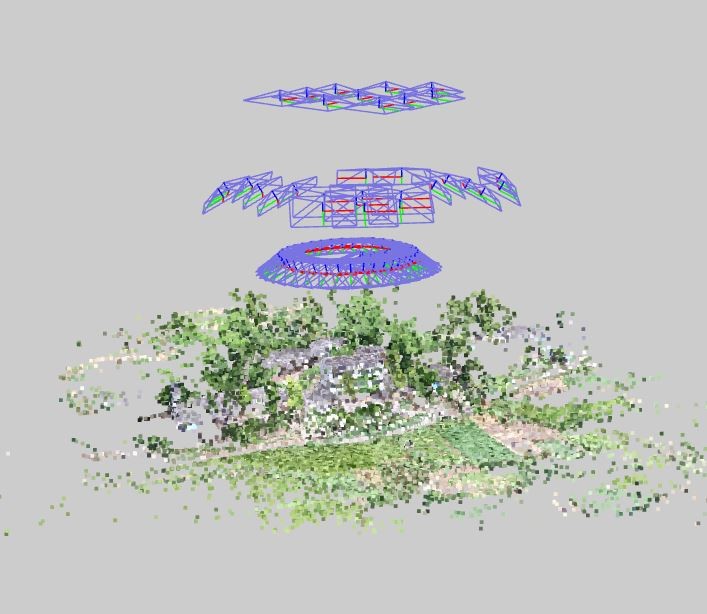
模型越精細,地面取樣密度GSD越高。在相機引數一定,飛行高度越低,地面精度越高,模型重建的結果就更加細緻。飛的越高採集的區域越大,而飛得相對較低的部分模型精度較高,建模效果越好。
參考文獻:
1.於廣瑞,王智超,張坤鵬,孫立軍. 基於測繪型無人機航線優化設計應用研究[J]. 北京測繪,2015,(04):46-48+70.
2.邢誠. 基於簡化SIFT演算法的無人機影像重疊度分析[J]. 哈爾濱工程大學學報,2012,33(02):221-225.
3.崔紅霞,林宗堅,孫杰. 大重疊度無人機遙感影像的三維建模方法研究[J]. 測繪科學,2005,(02):36-38+4.
相關推薦
給你一臺大疆無人機,你能用來做點啥?(三)------傾斜攝影建模基礎
在做正射影像或者傾斜建模過程中會涉及到一些攝影測量和傾斜建模有關一些知識,順便查了一些資料,然後覺得很有必要,就稍微系統羅列了一下,在最後還提供了幾個建模航線為大家作為參考,希望對大家有幫助。 一、重疊度、航線彎曲、像片旋角。 1.1航向重疊率
給你一臺大疆無人機,你能用來做點啥?(二)-----——傾斜攝影建模
上一期我們寫了一篇關於如何用大疆輕小型無人機制作正射影像。這一期講解如何利用大疆輕小型無人機進行傾斜攝影建模。 一、 採集資料 地面站用Altizure 這個app,很方便的!強烈推薦。 規劃採集資料區域 設定重疊率和鏡頭傾斜角度以及飛行速度 航線分東、南
SDP(13): Scala.Future - far from completion,絕不能用來做甩手掌櫃
atm 軟件 listen async execute gpo eve 並且 pri 在前面幾篇關於數據庫引擎的討論裏很多的運算函數都返回了scala.Future類型的結果,因為我以為這樣就可以很方便的實現了non-blocking效果。無論任何復雜的數據處理操作,只
Python那麽火,到底能用來做什麽?我們來說說Python3的主要應用
htm 51cto atp 出現 instagram 希望 pytho b2c 代碼塊 如果您正在考慮學習Python,或者您最近剛開始學習, 您可能會問自己:“我到底可以用Python做什麽?” 這是個棘手的問題,因為Python有很多用途。 但是隨著時間的推移, 我發現
大疆無人機,賽爾傾斜相機,合作打造高效行業應用解決方案
隨著無人機和傾斜五目相機技術本身的發展,以及各行業的資訊化建設推進應用,無人機和傾斜五目相機有越來越多的機會成為“標準工具”,在空中提供精準的資料採集能力以提升作業效率。於是這一趨勢也造就了廣闊的無人機與三維建模行業應用市場。 大疆在MWC 2017(2017世界移動大會)上正式釋出了全新系列平
大疆無人機Android版SDK開發踩坑之旅(一)----前言
最近一段時間一直在做大疆無人機安卓版開發,這水也是挺深的,不仔細看官網SDK的介紹就會遇到各種各樣的坑,簡單記錄一下,希望可以讓其他人少走一些彎路。 安卓端用到的SDK大概有兩種:Android SDK和Android UX SDK Android SDK(官網介紹): 開發人員可以通過SDK
IPHONE6 近來1年不會開放NFC的API給開發人員,也就是僅僅能用來做支持了如今
company its put ech tran repo article -s cati IPHONE6 近來1還不會開放NFC的API給開發人員,也就是僅僅能用來做支持了如今,可是能夠肯定的是,以後肯定會放發出來的。就像指紋傳感器一樣,如今也開放出來了。前
為什麼中文不能用來做程式設計,而英文卻可以?深資程式設計師告訴你答案
為什麼中文不能用來做程式設計,而英文卻可以?深資程式設計師告訴你答案 小編推薦一個學C語言/C++的學習群:948954484,入群即送C/C++全套學習資料,滿滿的乾貨! 接觸過程式設計的人都知道,不管是國內還是國外,大家都是使用英文來做程式設計的。所以有不少人很好奇,為什麼只能用英文來寫
MD5 和的價值體現在哪裏,它是用來做什麽的?
是否 什麽 使用 pos HA products 互聯網 con www MD5 和的價值體現在哪裏,它是用來做什麽的? MD5 和是由字母和數字構成的字符串,起到了文件指紋的作用。如果兩個文件有相同的 MD5 和值,那麽,文件完全相同。您可以為每一軟件下載使用所提供的 M
JDK的Proxy技術實現AOP,InvocationHandler和Proxy詳解——Spring AOP(三)
上一章已經講到了想要完成AOP的設計原理以及要實現AOP功能,得需要使用代理模式: 本章就介紹一個實現動態代理的兩種方式之一——JDK中的Proxy技術 AOP實現原理(使用JDK中的Proxy技術實現AOP功能,InvocationHandler和Proxy(Class)詳解
redis可以用來做什麼?(一)
redis可以用來做什麼?以部落格帖子為例大概說說,當然redis的其他功能還有很多,後續在做介紹。 Redis 是網際網路技術領域使用最為廣泛的儲存中介軟體,它是「Remote Dictionary Service」的首字母縮寫,也就是「遠端字典服務」。 記錄帖子的點贊數、評論數和點選數 (hash)
java基礎重點講解,看了還不會找我(三)
###03.01_Java語言基礎(邏輯運算子的基本用法)(掌握) * A:邏輯運算子有哪些 * &,|,^,! * &&,|| * B:案例演示 * 邏輯運算子的基本用法
Python那麼火,到底可以用來做什麼?
如果您正在考慮學習Python,或者您最近剛開始學習,您可能會問自己:“我到底可以用Python做什麼?”這是個棘手的問題,因為Python有很多用途。但是隨著時間的推移,我發現Python主要可用於一下三個方面: 如果您正在考慮學習Python,或者您最近剛開始學習,您可
萬能的Python,還能用來製作高大上的進度條?
開發十年,就只剩下這套架構體系了! >>>
如果給你一臺電梯,請問你如何測試它
nbsp 性能 可靠 多次 需求 關閉 正常 模塊 用戶 1.功能:上升、下降、停止、開門、關門、梯內電話、燈光、指示燈等;2.性能:速度、反應時間、關門時間等;3.壓力:超載、尖銳物碰撞電梯壁等;4.安全:停電、報警裝置、轎箱停靠位置、有人扒門時的情況等;5.可用性:按鍵
微軟釋出Windows SDK,通過Windows 10應用控制大疆無人機
微軟今天在公開預覽版中推出了Windows SDK,供開發人員製作可以控制大疆無人機的Windows 10應用程式。機器人元件、感測器或執行器等可能包含在無人機中的硬體也可以使用SDK進行整合。 微軟還宣佈了AirMap,這是一項幫助使用者遵守當地法律並避免與其他無人機發生衝突的服務,它將
Linux:寫一個指令碼,給每一臺主機裝上JDK,並配好環境變數
當我們有很多臺主機,想在每臺機器上都安裝一樣的某些軟體時,可以通過指令碼去實現。 首先建立一個資料夾noarch(這裡是因為我之前配置的目錄就在這,所以就寫這個了,你可以隨便寫個名字) mkdir noarch 把事先下載好的軟體包放在這個目錄下(這個過程所有機器
Linux:自動化部署指令碼,給每一臺主機裝上JDK,且配好環境變數
centos6.7 當我們有很多臺主機,想在每臺機器上都安裝一樣的某些軟體,當然,一臺機器一臺機器安裝也是可以的,但是如果有一鍵安裝所有機器上的軟體那是不是很激動人心呢! 首先我們需要製作一臺伺服器,並把軟體包放在我們的伺服器上 首先進入 /var/www/html資料夾
解決大疆無人機飛了一段距離就停下來的問題(大疆限飛50米)
在開發大疆SDK時候遇到一個問題就是大疆的無人機飛了一段距離就停下來了,一直以為是自己的程式碼問題,弄了很久,後來才發現原來是大疆的限制,必須呼叫他的介面去登入大疆的賬號,不登入賬號就限飛50米,藍瘦。
Appium+python自動化(二十一)- 讓猴子按你指令大鬧手機,讓我們都成為耍猴高手(超詳解)
簡介 一年一度的暑假如期而至,每年必不可少的,便是《西遊記》這部經典電視連續劇的播出,作為一名90後,對於這部經典劇的情誼,就是觀看已成為一種習慣。依然深刻的記得,小時候媽媽為了催促我睡覺,而關掉我的《西遊記》,那種哀求不成繼而絕望的感覺,至今記憶猶新。長大後只要得空在家,哪怕手裡做著其他的事