
【無人駕駛系列】基於ROS的無人駕駛系統
作者簡介:
劉少山,PerceptIn聯合創始人,主要專注於增強現實、虛擬現實、機器人的核心SLAM技術及其在智慧硬體上的實現與優化。創立PerceptIn之前在百度美國研發中心工作,負責無人車系統架構及產品化。
張偉德,百度美國研發中心高階架構師。曾在弗吉尼亞大學網格計算小組擔任研究員,在Yahoo!、微軟等公司負責大型分散式搜尋構架設計。目前在百度從事大資料、深度學習架構和開發。
James Peng,百度首席架構師。斯坦福大學博士,研究方向包括雲端計算平臺、深度學習、資料建模、大規模資料庫等。曾在Google工作多年,加入百度後領導多個創新專案,並於2013年獲得百度最高獎。
責編:周建丁([email protected])
本文為《程式設計師》原創文章,未經允許不得轉載,更多精彩文章請訂閱2016年《程式設計師》
本文是無人駕駛技術系列的第二篇。在上篇解析光學雷達(LiDAR)技術之後,本文著重介紹基於機器人作業系統ROS的無人駕駛系統。文中將介紹ROS以及它在無人駕駛場景中的優缺點,並討論如何在ROS的基礎上提升無人駕駛系統的可靠性、通訊效能和安全性。
無人駕駛:多種技術的整合
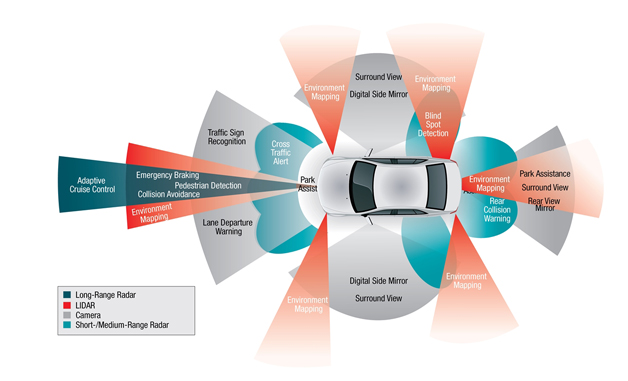
無人駕駛技術是多個技術的整合,如圖1所示,一個無人駕駛系統包含了多個感測器,包括長距雷達、鐳射雷達、短距雷達、攝像頭、超聲波、GPS、陀螺儀等。每個感測器在執行時都不斷產生資料,而且系統對每個感測器產生的資料都有很強的實時處理要求。比如攝像頭需要達到60FPS的幀率,意味著留給每幀的處理時間只有16毫秒。但當資料量增大之後,分配系統資源便成了一個難題。例如,當大量的鐳射雷達點雲資料進入系統,佔滿CPU資源,就很可能使得攝像頭的資料無法及時處理,導致無人駕駛系統錯過交通燈的識別,造成嚴重後果。
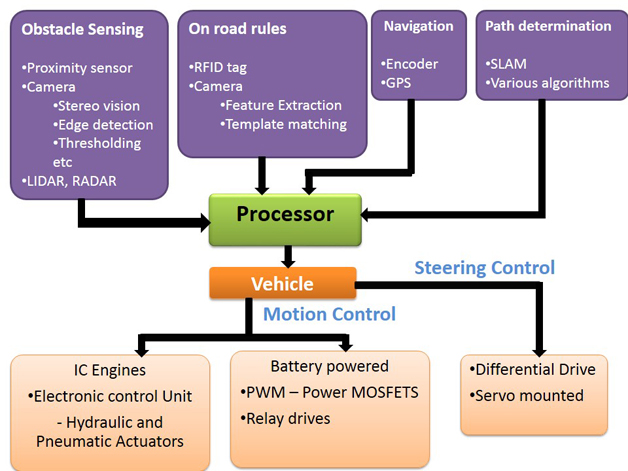
如圖2所示,無人駕駛系統整合了多個軟體模組(包括路徑規劃、避障、導航、交通訊號監測等)和多個硬體模組(包括計算、控制、感測器模組等),如何有效調配軟硬體資源也是一個挑戰。具體包括三個問題:第一,當軟硬體模組資料增加,執行期間難免有些模組會出現異常退出的問題,甚至導致系統崩潰,此時如何為提供系統自修復能力?第二,由於模組之間有很強的聯絡,如何管理模組間的有效通訊(關鍵模組間的通訊,資訊不可丟失,不可有過大的延時)?第三,每個功能模組間如何進行資源隔離?如何分配計算與記憶體資源?當資源不足時如何確認更高的優先順序執行?
簡單的嵌入式系統並不能滿足無人駕駛系統的上述需求,我們需要一個成熟、穩定、高效能的作業系統去管理各個模組。在詳細調研後,我們覺得機器人作業系統ROS比較適合無人駕駛場景。下文將介紹ROS的優缺點,以及如何改進ROS使之更適用於無人駕駛系統。
機器人作業系統(ROS)簡介
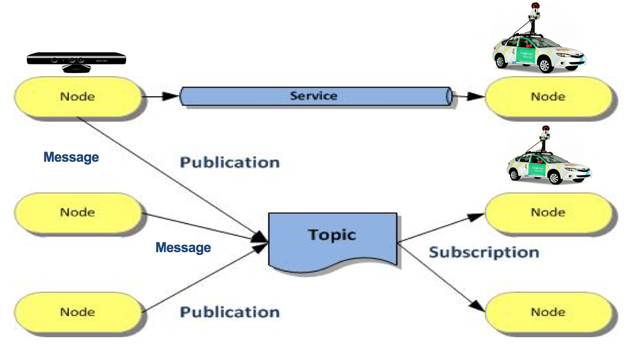
ROS是一個強大而靈活的機器人程式設計框架,從軟體構架的角度說,它是一種基於訊息傳遞通訊的分散式多程序框架。ROS很早就被機器人行業使用,很多知名的機器人開源庫,比如基於quaternion的座標轉換、3D點雲處理驅動、定位演算法SLAM等都是開源貢獻者基於ROS開發的。因為ROS本身是基於訊息機制的,開發者可以根據功能把軟體拆分成為各個模組,每個模組只是負責讀取和分發訊息,模組間通過訊息關聯。如圖3所示,最左邊的節點可能會負責從硬體驅動讀取資料(比如Kinect),讀出的資料會以訊息的方式打包,ROS底層會識別這個訊息的使用者,然後把訊息資料分發給他們。
ROS 1.0
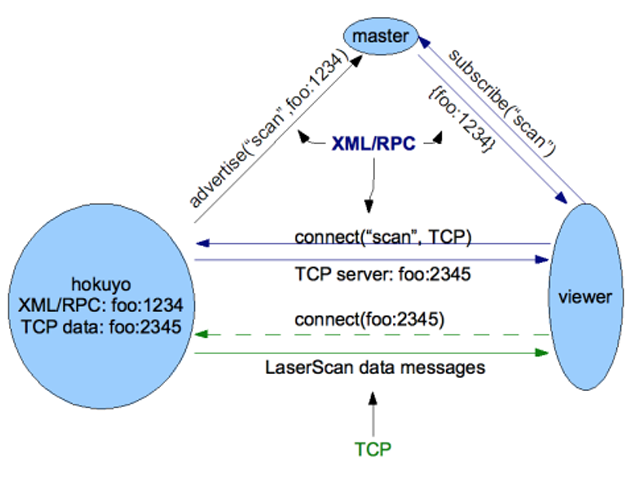
ROS 1.0起源於Willow Garage的PR2專案,主要元件包括ROS Master、ROS Node和ROS Service三種。ROS Master的主要功能是命名服務,它儲存了啟動時需要的執行時引數,訊息釋出上游節點和接收下游節點的連線名和連線方式,和已有ROS服務的連線名。ROS Node節點是真正的執行模組,對收到的訊息進行處理,並且釋出新的訊息給下游節點。ROS Service是一種特殊的ROS節點,它相當於一個服務節點,接受請求並返回請求的結果。圖4展示了ROS通訊的流程順序,首先節點會向master advertise或者subscribe感興趣的topic。當建立連線時,下游節點會向上遊節點TCP Server釋出連線請求,等連線建立後,上游節點的訊息就會通過連線送至下游節點。
ROS 2.0
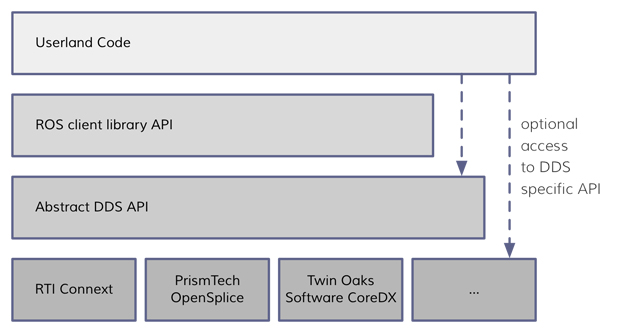
ROS 2.0的改進主要是為了讓ROS能夠符合工業級的執行標準,採用了DDS(資料分發服務)這個工業級別的中介軟體來負責可靠通訊,通訊節點動態發現,並用shared memory方式使得通訊效率更高。通過使用DDS,所有節點的通訊拓撲結構都依賴於動態P2P的自發現模式,所以也就去掉ROS Master這個中心節點。如圖5所示,RTI Context、PrismTech OpenSplice和Twin Oaks都是DDS的中介軟體提供商,上層通過DDS API封裝,這樣DDS的實現對於ROS Client透明。設計上ROS主頁詳細討論了用DDS的原因,詳情參見http://design.ros2.org/articles/ros_on_dds.html。
在無人車駕駛系統中, 我們選擇依舊基於ROS 1.0 開發,而不是ROS 2.0,主要有以下幾點考慮:
- ROS 2.0是一個開發中的框架,很多功能還不是很完整,有待更多的測試與驗證。而在無人駕駛環境中,穩定性與安全性是至關重要的,我們需要基於一個經過驗證的穩定系統來保證系統的穩定性、安全性和效能,以達到無人車的要求。
- DDS本身的耗費。我們測試了直接在ROS 1.0上使用DDS中介軟體,其中國防科技大學有一個開源專案MicROS已經做了相關的嘗試,詳情參見https://github.com/cyberdb/micROS-drt。但是實驗發現在一般的ROS通訊場景中(100K傳送者接收者通訊),ROS on DDS的吞吐率並不及ROS 1.0,主要原因是DDS框架本身的耗費要比ROS多一些,同時用了DDS以後CPU佔用率有明顯提高。但是我們也確認了使用DDS之後,ROS的QoS高優先順序的吞吐率和組播能力有了大幅提升。我們的測試基於PrismTech OpenSplice的社群版,在它的企業版中有針對單機的優化,比如使用了共享記憶體的優化,我們暫未測試。
- DDS介面的複雜性。DDS本身就是一套龐大的系統,其介面的定義極其複雜,同時文件支援較薄弱。
系統可靠性
如上文所述,系統可靠性是無人駕駛系統最重要的特性。試想幾個場景:第一,系統執行時ROSMaster出錯退出,導致系統崩潰;第二,其中一個ROS節點出錯,導致系統部分功能缺失。以上任何一個場景在無人駕駛環境中都可能造成嚴重的後果。對於ROS而言,其在工業領域的應用可靠性是非常重要的設計考量,但是目前的ROS設計對這方面考慮得比較少。下面就討論實時系統的可靠性涉及的一些要素。
去中心化
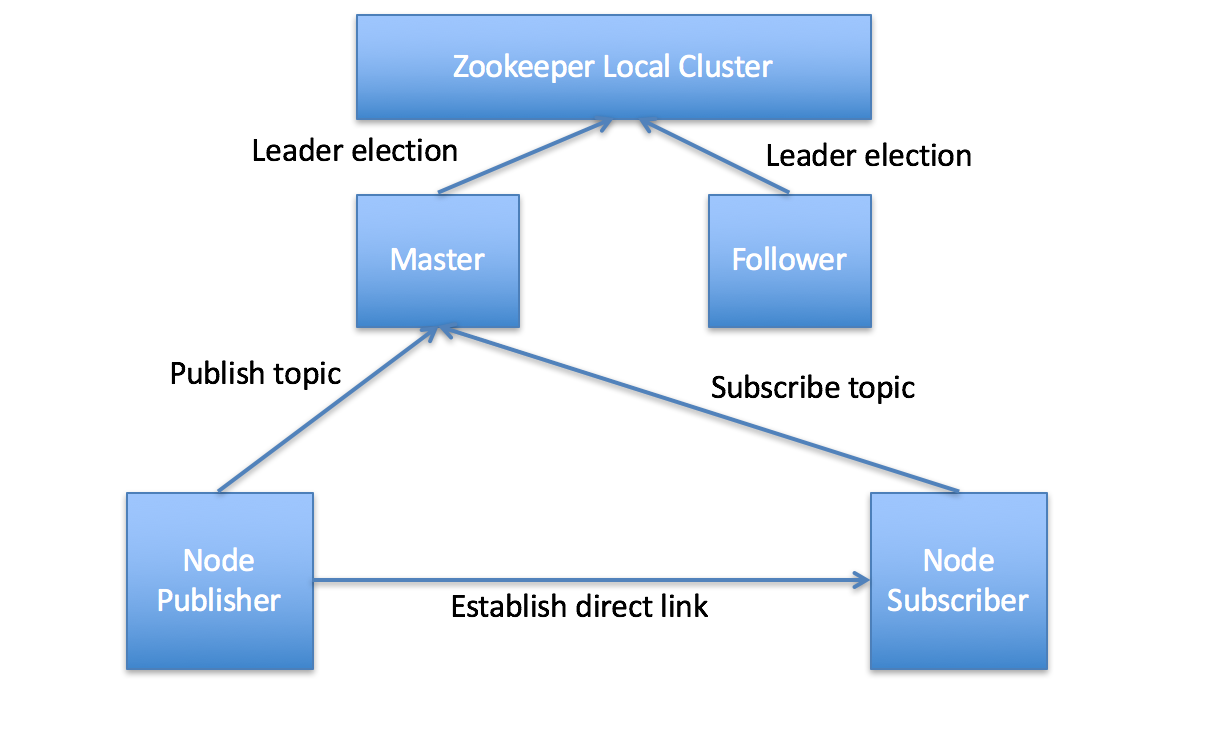
ROS重要節點需要熱備份,以便宕機時可以隨時切換。在ROS 1.0的設計中,主節點維護了系統執行所需的連線、引數和主題資訊,如果ROS Master宕機了,整個系統就有可能無法正常執行。去中心化的解決方案有很多,如圖6所示,我們可以採用主從節點的方式(類似ZooKeeper),同時主節點的寫入資訊隨時備份,主節點宕機後,備份節點被切換為主節點,並且用備份的主節點完成資訊初始化。
實時監控和報警
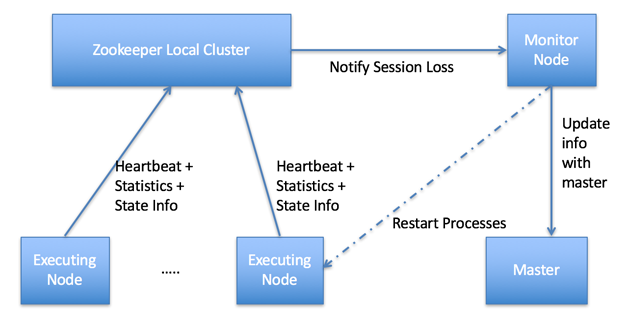
對於執行的節點實時監控其執行資料,並檢測到嚴重的錯誤資訊時報警。目前ROS並沒有針對監控做太多的構架考慮,然而這塊方面恰恰是最重要的。對於執行時的節點,監控其執行資料,比如應用層統計資訊、執行狀態等,對將來的除錯、錯誤追蹤都有很多好處。如圖7所示,實時監控從軟體構架來說主要分成3部分:ROS節點層的監控資料API,讓開發者能夠設定所需的統計資訊,通過統一的API進行記錄;監控服務端定期從節點獲取監控資料(對於緊急的報警資訊,節點可以把訊息推送給監控服務端);獲取到監控資料後,監控服務端對資料進行整合、分析、記錄,在察覺到異常資訊後報警。
節點宕機狀態恢復
節點宕機的時候,需要通過重啟的機制恢復節點,這個重啟可以是無狀態的,但有些時候也必須是有狀態的,因此狀態的備份格外重要。節點的宕機檢測也是非常重要的,如果察覺到節點宕機,必須很快地使用備份的資料重啟。這個功能我們也已經在ZooKeeper框架下實現了。
系統通訊效能提升
由於無人駕駛系統模組很多,模組間的資訊互動很頻繁,提升系統通訊效能會對整個系統性能提升的作用很大。我們主要從以下三個方面來提高效能:
第一,目前同一個機器上的ROS節點間的通訊使用網路棧的loop-back機制,也就是說每一個數據包都需要經過多層軟體棧處理,這將造成不必要的延時(每次20微秒左右)與資源消耗。為了解決這個問題,我們可以使用共享記憶體的方法把資料memory-map到記憶體中,然後只傳遞資料的地址與大小資訊,從而把資料傳輸延時控制在20微秒內,並且節省了許多CPU資源。
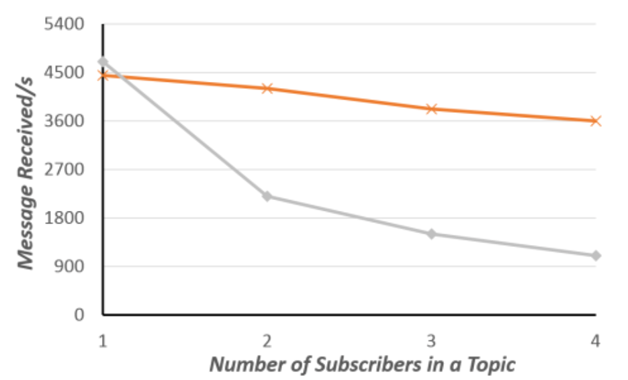
第二,現在ROS做資料broadcast的時候,底層實現其實是使用multiple unicast,也就是多個點對點的傳送。假如要把資料傳給5個節點,那麼同樣的資料會被拷貝5份。這造成了很大的資源浪費,特別是記憶體資源的浪費。另外,這樣也會對通訊系統的吞吐量造成很大壓力。為了解決這個問題,我們使用了組播multicast機制:在傳送節點和每一接收節點之間實現點對多點的網路連線。如果一個傳送節點同時給多個接收節點傳輸相同的資料,只需複製一份相同的資料包。組播機制提高了資料傳送效率,減少了骨幹網路出現擁塞的可能性。圖8對比了原有的通訊機制(灰線)與組播機制(橙色)的效能,隨著接收節點數量增加(X軸),原有的通訊機制的資料吞吐量急劇下降,而組播機制的資料吞吐量則比較平穩,沒有受到嚴重影響。
第三,對ROS的通訊棧研究,我們發現通訊延時很大的損耗是在資料的序列化與反序列化的過程。序列化將記憶體裡物件的狀態資訊轉換為可以儲存或傳輸的形式。在序列化期間,物件將其當前狀態寫入到臨時或永續性儲存區。之後,可以通過從儲存區中讀取或反序列化物件的狀態,重新建立該物件。為了解決這個問題,我們使用了輕量級的序列化程式,將序列化的延時降低了50%。
系統資源管理與安全性
如何解決資源分配與安全問題是無人駕駛技術的一個大課題。想象兩個簡單的攻擊場景:第一,其中一個ROS的節點被劫持,然後不斷地分配記憶體,導致系統記憶體消耗殆盡,造成系統OOM而開始關閉不同的ROS節點程序,從而整個無人駕駛系統崩潰。第二,ROS的topic或者service被劫持, ROS節點之間傳遞的資訊被偽造,導致無人駕駛系統行為異常。
我們選擇的方法是使用Linux Container(LXC)來管理每一個ROS節點程序。簡單來說,LXC提供輕量級的虛擬化以便隔離程序和資源,而且不需要提供指令解釋機制以及全虛擬化等其他複雜功能,相當於C++中的NameSpace。LXC有效地將單個作業系統管理的資源劃分到孤立的群組中,以更好地在孤立的群組之間平衡有衝突的資源使用需求。對於無人駕駛場景來說,LXC最大的好處是效能損耗小。我們測試發現,在執行時LXC只造成了5%左右的CPU損耗。
除了資源限制外,LXC也提供了沙盒支援,使得系統可以限制ROS節點程序的許可權。為了避免有危險性的ROS節點程序可能破壞其他ROS節點程序的執行,沙盒技術可以限制可能有危險性的ROS節點訪問磁碟、記憶體以及網路資源。另外為了防止節點中的通訊被劫持,我們還實現了節點中通訊的輕量級加密解密機制,使黑客不能回放或更改通訊內容。
結論
要保證一個複雜的系統穩定、高效地執行,每個模組都能發揮出最大的潛能,需要一個成熟有效的管理機制。在無人駕駛場景中,ROS提供了這樣一個管理機制,使得系統中的每個軟硬體模組都能有效地進行互動。原生的ROS提供了許多必要的功能,但是這些功能並不能滿足無人駕駛的所有需求,因此我們在ROS之上進一步地提高了系統的效能與可靠性,完成了有效的資源管理及隔離。我們相信隨著無人駕駛技術的發展,更多的系統需求會被提出,比如車車互聯、車與城市交通系統互聯、雲車互聯、異構計算硬體加速等,我們也將會持續優化這個系統,力求讓它變成無人駕駛的標準系統。
無人駕駛技術系列文章將討論ROS系統、高精地圖、路徑規劃、底層控制和視覺識別等技術。整體規劃如下,敬請期待:
相關推薦
【無人駕駛系列】基於ROS的無人駕駛系統
作者簡介: 劉少山,PerceptIn聯合創始人,主要專注於增強現實、虛擬現實、機器人的核心SLAM技術及其在智慧硬體上的實現與優化。創立PerceptIn之前在百度美國研發中心工作,負責無人車系統架構及產品化。 張偉德,百度美國研發中心高階架構師。曾在弗吉尼亞大學網格計
【無人駕駛系列二】基於ROS的無人駕駛系統
本文是無人駕駛技術系列的第二篇。在上篇解析光學雷達(LiDAR)技術之後,本文著重介紹基於機器人作業系統ROS的無人駕駛系統。文中將介紹ROS以及它在無人駕駛場景中的優缺點,並討論如何在ROS的基礎上提升無人駕駛系統的可靠性、通訊效能和安全性。 無人駕駛:多種技術的整合 無人駕駛技術是多個
【無人駕駛系列】鐳射雷達(LiDAR)在無人駕駛技術中的應用
無人駕駛汽車的成功涉及高精地圖、實時定位以及障礙物檢測等多項技術,而這些技術都離不開光學雷達(LiDAR)。本文將深入解析光學雷達是如何被廣泛應用到無人車的各項技術中。文章首先介紹光學雷達的工作原理,包括如何通過鐳射掃描出點雲;然後詳細解釋光學雷達在無人駕駛技術中的應用,包括
【金陽光測試】基於控件核心技術探討---Android自己主動化系列(2)---2013年5月
進程 實用 版本 信號 監聽 dialog otto 設計 核心技術 第一講分享了下安卓自己主動化一些概況和一些自己主動化框架現狀和技術可以解決什麽樣的問題。這次課就深入到android世界裏面。遨遊、翺翔。深入了解自己主動化測試核心技術。
【GAN ZOO翻譯系列】基於能量的生成對抗網路 Energy-Based Generative Adversarial Networks
趙俊博, Michael Mathieu, Yann LeCun 紐約大學計算機科學系 Facebook人工智慧研究院 {jakezhao, mathieu, yann}@cs.nyu.edu 原文連結https://arxiv.org/abs/1609.031
【菜鳥系列】hbase(java)介面--基於hbase1.1.2
先講解下主要的介面類 HBaseConfiguration org.apache.hadoop.hbase.HBaseConfiguration Adds HBase configuration files to a Configuratio
【開源專案系列】如何基於 Spring Cache 實現多級快取(同時整合本地快取 Ehcache 和分散式快取 Redis)
## 一、快取 當系統的併發量上來了,如果我們頻繁地去訪問資料庫,那麼會使資料庫的壓力不斷增大,在高峰時甚至可以出現數據庫崩潰的現象。所以一般我們會使用快取來解決這個資料庫併發訪問問題,使用者訪問進來,會先從快取裡查詢,如果存在則返回,如果不存在再從資料庫裡查詢,最後新增到快取裡,然後返回給使用者,當然了,接
【CNMP系列】CNMP之路,系統起步。
ftp 系列 fig samba 建立連接 編輯 為我 作用 let 簡單的來理解,我所說的CNMP,不是CNM+P,而是CentOs+Nginx+MySql+PHP,也可以單純的理解為LNMP,但是系統是我們自己選的,雖說是Linux的一個分支,但我就喜歡CentOs的這
【iOS開發系列】九宮格布局
使用 objc with div self. orm i++ back hab /** * 這個盡管非常easy,算是一個小技巧,可是碰到了就記錄下來吧.積跬步,致千裏嘛. */ - (void)scratchableLatex { for (int i=
【JVM命令系列】jmap
mark bsp null 參考 nfa location bootstra 內容 遠程debug 命令基本概述 Jmap是一個可以輸出所有內存中對象的工具,甚至可以將VM 中的heap,以二進制輸出成文本。打印出某個java進程(使用pid)內存內的,所有‘對象’的情況(
【iOS開發系列】NSObject方法介紹
ati ber oid ring cto rgb dst -s 推斷 NSObject是OC中的基類,全部類都繼承於此,這裏面也給我們提供了非常多與“類”和“方法”相關的方法,本文將解說幾個非常有用的方法。 正文: Per
【ALB學習筆記】基於事件觸發方式的串行通信接口數據接收案例
except 和數 從數據 發送數據 exceptio 工作原理 實時 double 窗體 基於事件觸發方式的串行通信接口數據接收案例 廣東職業技術學院 歐浩源 1、案例背景 之前寫過一篇《基於多線程方式的串行通信接口數據接收案例》的博文,討論了采用輪詢方
【ALB學習筆記】基於.NET環境的高頻RFID卡讀寫設備的基本操作案例
範例 write load rgs 顯示 職業 ner num cte 基於.NET環境的高頻RFID卡讀寫設備的基本操作案例 廣東職業技術學院 歐浩源 1、引言 RFID高頻卡在我們的日常生活中隨處可見,是物聯網應用中不可或缺的一個重要部分,也是全國職業
【大數據系列】HDFS文件權限和安全模式、安裝
重新啟動 inux 客戶 元數據 masters cnblogs 格式 新的 檢測 HDFS文件權限 1、與linux文件權限類型 r:read w:write x:execute權限x對於文件忽略,對於文件夾表示是否允許訪問其內容 2、如果linux系統用戶sanglp
【大數據系列】MapReduce示例好友推薦
trac [0 ont protect run task main orm pat package org.slp; import org.apache.hadoop.io.LongWritable; import org.apache.hadoop.io.Text;
【大數據系列】在hadoop2.8.0下配置SecondaryNameNode
hadoop .cn color dfs repl images replicat style 節點 修改namenode上的hdfs-site.xml configuration> <property> <name>dfs.r
【SignalR學習系列】4. SignalR廣播程序
back aspnet ocs || tutorial strong family load over 創建項目 創建一個空的 Web 項目,並在 Nuget 裏面添加 SignalR,jQuery UI 包,添加以後項目裏包含了 jQuery,jQuery.UI ,和
【Owin 學習系列】1. 第一個 Owin 程序
進程 task reading 地址 [] 地址欄 urn rtu () IIS 中的 Owin 在 IIS 裏面部署 Owin,既能得到 Owin 管道模型的靈活性和模塊特性,也能很好地利用 IIS 成熟的配置,Owin 程序將會跑在 ASP.NET reques
【問題記錄系列】the resource is not on the build path of a java project
搭建 關閉 spring源碼 remove 環境 eclips 右鍵 生產 ldp 在eclipse中新建了一個maven項目搭建Spring源碼閱讀環境,創建一個bean生產getter和setter方法的時候報錯“the resource is not on the b
【表格建模系列】二、添加數據
geography custom img eof pan ipaddress customer fwe ebr 加載如下表並清空相應字段: DimCustomer清除字段: SpanishEducation, FrenchEducation, SpanishOccupati