
ARM Linux啟動流程分析——start_kernel前啟動階段(彙編部分)
本文整理了ARM Linxu啟動流程的第二階段——start_kernel前啟動階段(彙編部分),核心版本為3.12.35。我以手上的樹莓派b(ARM11)為平臺示例來分析Linux核心在自解壓後到跳轉執行start_kernel之前所做的主要初始化工作:包括引數有效性驗證、建立初始頁表和MMU初始化等。
核心版本:Linux-3.12.35分析檔案:arch/arm/kernel/head.S、head-common.S、proc-v6.S
單板:樹莓派b
在核心啟動時執行自解壓完成後,會跳轉到解壓後的地址處執行,在我的環境中就是地址0x00008000處,然後核心啟動並執行初始化。
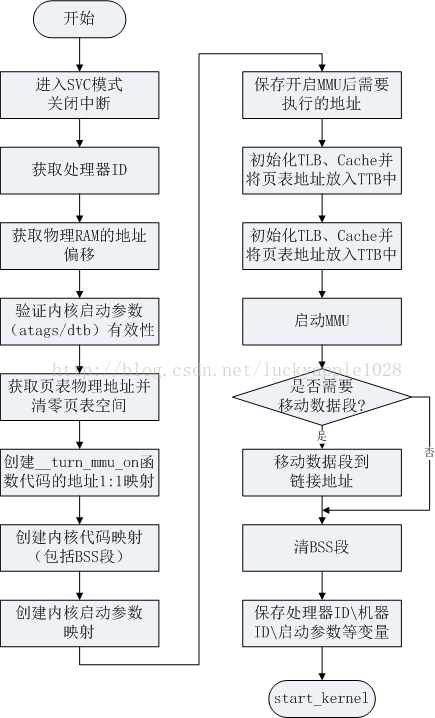
首先給出你核心啟動的彙編部分的總流程如下:
核心啟動程式的入口:參見arch/arm/kernel/vmlinux.lds(由arch/arm/kernel/vmlinux.lds.S生成)。
arch/arm/kernel/vmlinux.lds:
ENTRY(stext)
jiffies = jiffies_64;
SECTIONS
{
......
. = 0xC0000000 + 0x00008000;
.head.text : {
_text = .;
*(.head.text)
}
.text : { /* Real text segment */
_stext = .; /* Text and read-only data */此處的TEXT_OFFSET表示核心起始地址相對於RAM地址的偏移值,定義在arch/arm/Makefile中,值為0x00008000:
textofs-y := 0x00008000
......
# The byte offset of the kernel image in RAM from the start of RAM.
TEXT_OFFSET := $(textofs-y)
PAGE_OFFSET表示核心虛擬地址空間的其實地址,定義在arch/arm/include/asm/memory.h中:
CONFIG_PAGE_OFFSET定義在arch/arm/Kconfig中,採用預設值0xC0000000。#ifdef CONFIG_MMU /* * PAGE_OFFSET - the virtual address of the start of the kernel image * TASK_SIZE - the maximum size of a user space task. * TASK_UNMAPPED_BASE - the lower boundary of the mmap VM area */ #define PAGE_OFFSET UL(CONFIG_PAGE_OFFSET)
config PAGE_OFFSET
hex
default 0x40000000 if VMSPLIT_1G
default 0x80000000 if VMSPLIT_2G
default 0xC0000000所以,可以看出核心的連結地址採用的是虛擬地址,地址值為0xC0008000。
核心啟動程式的入口在linux/arch/arm/kernel/head.S中,head.S中定義了幾個比較重要的變數,在看分析程式前先來看一下:
/*
* swapper_pg_dir is the virtual address of the initial page table.
* We place the page tables 16K below KERNEL_RAM_VADDR. Therefore, we must
* make sure that KERNEL_RAM_VADDR is correctly set. Currently, we expect
* the least significant 16 bits to be 0x8000, but we could probably
* relax this restriction to KERNEL_RAM_VADDR >= PAGE_OFFSET + 0x4000.
*/
#define KERNEL_RAM_VADDR (PAGE_OFFSET + TEXT_OFFSET)
#if (KERNEL_RAM_VADDR & 0xffff) != 0x8000
#error KERNEL_RAM_VADDR must start at 0xXXXX8000
#endif
#ifdef CONFIG_ARM_LPAE
/* LPAE requires an additional page for the PGD */
#define PG_DIR_SIZE 0x5000
#define PMD_ORDER 3
#else
#define PG_DIR_SIZE 0x4000
#define PMD_ORDER 2
#endif
.globl swapper_pg_dir
.equ swapper_pg_dir, KERNEL_RAM_VADDR - PG_DIR_SIZE
.macro pgtbl, rd, phys
add \rd, \phys, #TEXT_OFFSET - PG_DIR_SIZE
.endm其中KERNEL_RAM_VADDR表示核心啟動地址的虛擬地址,即前面看到的連結地址0xC0008000,同時核心要求這個地址的第16位必須是0x8000。
然後由於沒有配置ARM LPAE,則採用一級對映結構,頁表的大小為16KB,頁大小為1MB。
最後swapper_pg_dir表示初始頁表的起始地址,這個值等於核心起始虛擬地址-頁表大小=0xC0004000(核心起始地址下16KB空間存放頁表)。虛擬地址空間如下圖:
需要說明一下:在我的環境中,核心在自解壓階段被解壓到了0x00008000地址處,由於核心入口連結地址採用的是虛擬地址0xC0008000,這兩個地址並不相同;並且此時MMU並沒有被使能,所以無法進行虛擬地址到實體地址的轉換,程式開始執行後在開啟MMU前的將使用位置無關碼。
在知道了核心的入口位置後,來看一下此時的裝置和暫存器的狀態:
/*
* Kernel startup entry point.
* ---------------------------
*
* This is normally called from the decompressor code. The requirements
* are: MMU = off, D-cache = off, I-cache = dont care, r0 = 0,
* r1 = machine nr, r2 = atags or dtb pointer.
*
* This code is mostly position independent, so if you link the kernel at
* 0xc0008000, you call this at __pa(0xc0008000).
*
* See linux/arch/arm/tools/mach-types for the complete list of machine
* numbers for r1.
*
* We're trying to keep crap to a minimum; DO NOT add any machine specific
* crap here - that's what the boot loader (or in extreme, well justified
* circumstances, zImage) is for.
*/
.arm
__HEAD
ENTRY(stext)
註釋中說明了,此時的MMU關閉、D-cache關閉、r0 = 0、r1 = 機器碼、r2 = 啟動引數atags或dtb的地址(我的環境中使用的是atags),同時核心支援的機器碼被定義在了linux/arch/arm/tools/mach-types中。我樹莓派使用的是:
bcm2708 MACH_BCM2708 BCM2708 3138
下面來逐行分析程式碼:
THUMB( adr r9, BSYM(1f) ) @ Kernel is always entered in ARM.
THUMB( bx r9 ) @ If this is a Thumb-2 kernel,
THUMB( .thumb ) @ switch to Thumb now.
THUMB(1: )
#ifdef CONFIG_ARM_VIRT_EXT
bl __hyp_stub_install
#endif
@ ensure svc mode and all interrupts masked
safe_svcmode_maskall r9
mrc p15, 0, r9, c0, c0 @ get processor id
bl __lookup_processor_type @ r5=procinfo r9=cpuid這裡的safe_svcmode_maskall是一個巨集,定義在arch/arm/include/asm/assembler.h中,它的作用就是確保ARM進入SVC工作模式並遮蔽所有的中斷(此時關閉中斷的原因是中斷向量表尚未建立,核心無能力響應中斷)。
然後獲取處理器ID儲存到r9暫存器中,接著跳轉到__lookup_processor_type尋找對應處理器ID的proc_info地址。__lookup_processor_type定義在arch/arm/kernel/head-common.S中:
/*
* Read processor ID register (CP#15, CR0), and look up in the linker-built
* supported processor list. Note that we can't use the absolute addresses
* for the __proc_info lists since we aren't running with the MMU on
* (and therefore, we are not in the correct address space). We have to
* calculate the offset.
*
* r9 = cpuid
* Returns:
* r3, r4, r6 corrupted
* r5 = proc_info pointer in physical address space
* r9 = cpuid (preserved)
*/
__lookup_processor_type:
adr r3, __lookup_processor_type_data
ldmia r3, {r4 - r6}
sub r3, r3, r4 @ get offset between virt&phys
add r5, r5, r3 @ convert virt addresses to
add r6, r6, r3 @ physical address space
1: ldmia r5, {r3, r4} @ value, mask
and r4, r4, r9 @ mask wanted bits
teq r3, r4
beq 2f
add r5, r5, #PROC_INFO_SZ @ sizeof(proc_info_list)
cmp r5, r6
blo 1b
mov r5, #0 @ unknown processor
2: mov pc, lr
ENDPROC(__lookup_processor_type)首先獲取處理器相關資訊表的執行地址並儲存到r3暫存器中。核心將所有的處理器資訊都儲存在proc_info_list結構體表中,它的定義如下(asm/procinfo.h):
/*
* Note! struct processor is always defined if we're
* using MULTI_CPU, otherwise this entry is unused,
* but still exists.
*
* NOTE! The following structure is defined by assembly
* language, NOT C code. For more information, check:
* arch/arm/mm/proc-*.S and arch/arm/kernel/head.S
*/
struct proc_info_list {
unsigned int cpu_val;
unsigned int cpu_mask;
unsigned long __cpu_mm_mmu_flags; /* used by head.S */
unsigned long __cpu_io_mmu_flags; /* used by head.S */
unsigned long __cpu_flush; /* used by head.S */
const char *arch_name;
const char *elf_name;
unsigned int elf_hwcap;
const char *cpu_name;
struct processor *proc;
struct cpu_tlb_fns *tlb;
struct cpu_user_fns *user;
struct cpu_cache_fns *cache;
};結構體中描述了CPU相關的資訊,其中__cpu_mm_mmu_flags、__cpu_io_mmu_flags和__cpu_flush這三個欄位將會在head.s中使用到。處理器相關資訊都被儲存在.init.proc.info段中:
/*
* Look in <asm/procinfo.h> for information about the __proc_info structure.
*/
.align 2
.type __lookup_processor_type_data, %object
__lookup_processor_type_data:
.long .
.long __proc_info_begin
.long __proc_info_end
.size __lookup_processor_type_data, . - __lookup_processor_type_datavmlinux.lds:
.init.proc.info : {
. = ALIGN(4); __proc_info_begin = .; *(.proc.info.init) __proc_info_end = .;
}其中每種型別處理器的資訊定義在arch/arm/mm/proc-*.S下,例如我的環境定義在proc-v6.S中:
.section ".proc.info.init", #alloc, #execinstr
/*
* Match any ARMv6 processor core.
*/
.type __v6_proc_info, #object
__v6_proc_info:
.long 0x0007b000
.long 0x0007f000
ALT_SMP(.long \
PMD_TYPE_SECT | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ | \
PMD_FLAGS_SMP)
ALT_UP(.long \
PMD_TYPE_SECT | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ | \
PMD_FLAGS_UP)
.long PMD_TYPE_SECT | \
PMD_SECT_XN | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ
b __v6_setup
......回到__lookup_processor_type程式中,程式接著在r4、r5和r6中儲存__lookup_processor_type_data、__proc_info_begin和__proc_info_end的連結地址(即虛擬地址),然後通過r3 = r3 – r4得到執行地址和連結地址之間的偏移值並將r5和r6中的地址值修正為__proc_info_begin和__proc_info_end的執行地址。
然後從proc_info_list結構中取出cpu_val和cpu_mask欄位的內容,和r9中儲存的處理器ID進行比較,若匹配上了則通過r5暫存器返回當前處理器的proc_info_list結構資訊執行地址,否則r5 = r5 + PROC_INFO_SZ(即將r5指向下一條處理器的proc_info_list結構提資訊)繼續進行匹配。若全部匹配失敗,則r5返回0。 movs r10, r5 @ invalid processor (r5=0)?
THUMB( it eq ) @ force fixup-able long branch encoding
beq __error_p @ yes, error 'p'回到外層函式後,這裡會先將返回值付給r10,然後判斷是否返回值是否為0,若為0表示沒有匹配到對應的處理器資訊,呼叫__error_p打印出錯資訊並進入死迴圈,核心啟動失敗。
#ifdef CONFIG_ARM_LPAE
mrc p15, 0, r3, c0, c1, 4 @ read ID_MMFR0
and r3, r3, #0xf @ extract VMSA support
cmp r3, #5 @ long-descriptor translation table format?
THUMB( it lo ) @ force fixup-able long branch encoding
blo __error_p @ only classic page table format
#endif這裡ARM_LAPE表示大實體記憶體擴充套件,我的環境下並沒有配置該項,暫不考慮。
#ifndef CONFIG_XIP_KERNEL
adr r3, 2f
ldmia r3, {r4, r8}
sub r4, r3, r4 @ (PHYS_OFFSET - PAGE_OFFSET)
add r8, r8, r4 @ PHYS_OFFSET
#else
ldr r8, =PHYS_OFFSET @ always constant in this case
#endif這裡將計算起始RAM實體地址並儲存到r8中,計算的方法同前面獲取CPU資訊結構地址的方法類似,首先獲取標號為2處的執行地址和連結地址(通過反彙編檢視,我的環境分別是:0x00008070和0xC0008070),一減之後就得到了執行地址和實體地址的差值(0xC0000000),然後用這個差值加上PAGE_OFFSET(0xC0000000)即可得到實際實體記憶體的起始地址PHYS_OFFSET(0x00000000)。
現在來檢視反彙編程式碼,加深理解:
c0008040: e28f3028 add r3, pc, #40 ; 0x28
c0008044: e8930110 ldm r3, {r4, r8}
c0008048: e0434004 sub r4, r3, r4
c000804c: e0888004 add r8, r8, r4
......
c0008070: c0008070 andgt r8, r0, r0, ror r0
c0008074: c0000000 andgt r0, r0, r0這裡r3 = 0x00008040 + 0x8 + 0x28 = 0x00008070,r4 =0xC0008070,r8 = 0xC0000000,在經過偏移處理後,r8的值就變成了0x00000000,即物理RAM首地址在記憶體地址空間中的偏移PAGE_OFFSET。(這裡有一點疑問,如果我這裡核心的執行地址並不是在0x00008000,那這個計算出道的物理RAM首地址不是就不正確了?)
/*
* r1 = machine no, r2 = atags or dtb,
* r8 = phys_offset, r9 = cpuid, r10 = procinfo
*/
bl __vet_atags現在來確認一下暫存器中儲存內容的含義:
r1:機器碼
r2:atag或者dtb的地址
r8:實體記憶體地址偏移
r9:獲取到的CPU ID
r10:處理器資訊結構地址
然後呼叫__vet_atags來驗證r2中地址值得有效性
/* Determine validity of the r2 atags pointer. The heuristic requires
* that the pointer be aligned, in the first 16k of physical RAM and
* that the ATAG_CORE marker is first and present. If CONFIG_OF_FLATTREE
* is selected, then it will also accept a dtb pointer. Future revisions
* of this function may be more lenient with the physical address and
* may also be able to move the ATAGS block if necessary.
*
* Returns:
* r2 either valid atags pointer, valid dtb pointer, or zero
* r5, r6 corrupted
*/
__vet_atags:
tst r2, #0x3 @ aligned?
bne 1f
ldr r5, [r2, #0]
#ifdef CONFIG_OF_FLATTREE
ldr r6, =OF_DT_MAGIC @ is it a DTB?
cmp r5, r6
beq 2f
#endif
cmp r5, #ATAG_CORE_SIZE @ is first tag ATAG_CORE?
cmpne r5, #ATAG_CORE_SIZE_EMPTY
bne 1f
ldr r5, [r2, #4]
ldr r6, =ATAG_CORE
cmp r5, r6
bne 1f
2: mov pc, lr @ atag/dtb pointer is ok
1: mov r2, #0
mov pc, lr
ENDPROC(__vet_atags)首先驗證是否4位元組地址對齊,若不對齊則直接將r2內容清空並返回。接著讀取r2地址處的內容到r5暫存器中,這裡若配置了CONFIG_OF_FLATTREE就會判斷是否是DTB,我的環境中並沒有配置。
然後進行atag的驗證,若是atag,則r2地址處的內容將儲存tag_header中的size值(arch/arm/include/uapi/asm/setup.h),同時核心也要求atag資訊的第一項必須是ATAT_CORE型別的項
struct tag_header {
__u32 size;
__u32 tag;
};
......
struct tag_core {
__u32 flags; /* bit 0 = read-only */
__u32 pagesize;
__u32 rootdev;
};該CORE項的size值為sizeof(struct tag_header) + sizeof(struct tag_core) >> 2,正好等於ATAG_CORE_SIZE:
#define ATAG_CORE_SIZE ((2*4 + 3*4) >> 2)比較完size值後就將地址值偏移4位元組讀取tag值,比較是否等於ATAG_CORE,若是則驗證通過則跳轉到標號2處直接返回。
#ifdef CONFIG_SMP_ON_UP
bl __fixup_smp
#endif
#ifdef CONFIG_ARM_PATCH_PHYS_VIRT
bl __fixup_pv_table
#endif
bl __create_page_tables然後我這裡沒有配置CONFIG_SMP_ON_UP和CONFIG_ARM_PATCH_PHYS_VIRT選項(他們的核心配置解釋分別為Allowbooting SMP kernel on uniprocessor systems和Patch physical tovirtual translations at runtime),接下來就要跳轉到__create_page_tables中建立初始頁表了。
/*
* Setup the initial page tables. We only setup the barest
* amount which are required to get the kernel running, which
* generally means mapping in the kernel code.
*
* r8 = phys_offset, r9 = cpuid, r10 = procinfo
*
* Returns:
* r0, r3, r5-r7 corrupted
* r4 = page table (see ARCH_PGD_SHIFT in asm/memory.h)
*/
__create_page_tables:
pgtbl r4, r8 @ page table address這裡的註釋中說明了,建立初始頁表的過程只會建立核心程式碼部分地址的頁表。
這裡的pgtbl r4, r8表示獲取存放頁表首地址的執行時地址(實體地址)到r4中去,它在反彙編中被翻譯成:
c0008078 <__create_page_tables>:
c0008078: e2884901 add r4, r8, #16384 ; 0x4000可見這裡的r4值就是0x00004000,正好是頁表的起始實體地址。
/*
* Clear the swapper page table
*/
mov r0, r4
mov r3, #0
add r6, r0, #PG_DIR_SIZE
1: str r3, [r0], #4
str r3, [r0], #4
str r3, [r0], #4
str r3, [r0], #4
teq r0, r6
bne 1b然後將頁表記憶體空間清零,從0x00004000~0x00008000的空間都清零。
#ifdef CONFIG_ARM_LPAE
/*
* Build the PGD table (first level) to point to the PMD table. A PGD
* entry is 64-bit wide.
*/
mov r0, r4
add r3, r4, #0x1000 @ first PMD table address
orr r3, r3, #3 @ PGD block type
mov r6, #4 @ PTRS_PER_PGD
mov r7, #1 << (55 - 32) @ L_PGD_SWAPPER
1:
#ifdef CONFIG_CPU_ENDIAN_BE8
str r7, [r0], #4 @ set top PGD entry bits
str r3, [r0], #4 @ set bottom PGD entry bits
#else
str r3, [r0], #4 @ set bottom PGD entry bits
str r7, [r0], #4 @ set top PGD entry bits
#endif
add r3, r3, #0x1000 @ next PMD table
subs r6, r6, #1
bne 1b
add r4, r4, #0x1000 @ point to the PMD tables
#ifdef CONFIG_CPU_ENDIAN_BE8
add r4, r4, #4 @ we only write the bottom word
#endif
#endif由於沒有配置ARM_LPAE,這一部分內容先暫時不做分析,接著往下看。
ldr r7, [r10, #PROCINFO_MM_MMUFLAGS] @ mm_mmuflags
/*
* Create identity mapping to cater for __enable_mmu.
* This identity mapping will be removed by paging_init().
*/
adr r0, __turn_mmu_on_loc
ldmia r0, {r3, r5, r6}
sub r0, r0, r3 @ virt->phys offset
add r5, r5, r0 @ phys __turn_mmu_on
add r6, r6, r0 @ phys __turn_mmu_on_end
mov r5, r5, lsr #SECTION_SHIFT
mov r6, r6, lsr #SECTION_SHIFT這裡開始建立特殊對映來滿足開啟MMU的需求,該對映將會在核心後續初始化執行paging_init()時被銷燬。
首先從處理器的procinfo結構中獲取__cpu_mm_mmu_flags引數儲存在r7中,然後獲取標號__turn_mmu_on_loc處的執行地址儲存到r0中,然後使用前文中類似的手段獲得__trun_mmu_on和__trun_mmu_on_end入口處的實際執行的實體地址儲存到r5和r6暫存器中。
__turn_mmu_on_loc:
.long .
.long __turn_mmu_on
.long __turn_mmu_on_end然後由於我的環境中沒有開啟LAPE,採用一級對映方式,對映單位為1M,所以這裡的SECTION_SHIFT為20。這裡對r5和r6中的值右移20位,得到了__trun_mmu_on和__trun_mmu_on_end的物理基地址。
1: orr r3, r7, r5, lsl #SECTION_SHIFT @ flags + kernel base
str r3, [r4, r5, lsl #PMD_ORDER] @ identity mapping
cmp r5, r6
addlo r5, r5, #1 @ next section
blo 1b這裡將r5左移20位後或上r7中的標識位,得到了對應的First-level descriptor(即也表中存放的一級描述符,參見《ARM Linux啟動流程分析——核心自解壓階段》),然後將這個描述符寫到頁表中對應的項中去。
這裡包括__trun_mmu_on和__trun_mmu_on_end之間地址空間的特殊對映方式同樣採用的是1:1對映,因此這裡計算對應頁表向的方式如下:
頁表地址 = 對映物理基址 << PMD_ORDER(2)
例如:我環境中__trun_mmu_on實體地址為0xc0433398,它的基地址為0xc04,轉換為對應的表項為0x3010,所以會在0x00004000+0x3010處的頁表地址中寫入“頁描述符”,該描述描述符中的基址同樣為0xc04。在進行虛擬地址到實體地址的轉換過程中,即可實現x線性轉換(轉換方式參見《ARM Linux啟動流程分析——核心自解壓階段》)。
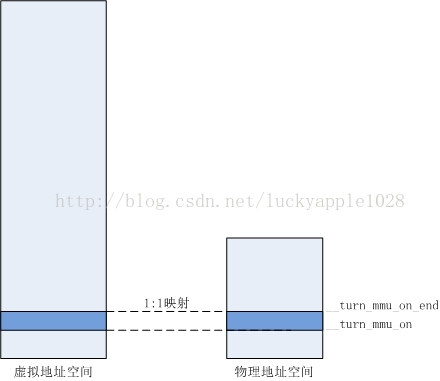
如此迴圈對映完整個__turn_mmu_on部分程式碼,對映後的地址空間如下圖:
/*
* Map our RAM from the start to the end of the kernel .bss section.
*/
add r0, r4, #PAGE_OFFSET >> (SECTION_SHIFT - PMD_ORDER)
ldr r6, =(_end - 1)
orr r3, r8, r7
add r6, r4, r6, lsr #(SECTION_SHIFT - PMD_ORDER)
1: str r3, [r0], #1 << PMD_ORDER
add r3, r3, #1 << SECTION_SHIFT
cmp r0, r6
bls 1b對映完開啟MMU部分的程式碼後,接下來開始對映核心。
首先將PAGE_OFFSET(0xc0008000)右移(20-2)位在加上r4(頁表物理基地址)得到核心起始連結地址對應頁表項的實體地址,儲存到r0中。
接著獲取核心程式碼的結束虛擬地址(包括了bss段)儲存到r6中,_end定義在vmlinux.lds中:
_edata_loc = __data_loc + SIZEOF(.data);
. = ALIGN(0); __bss_start = .; . = ALIGN(0); .sbss : AT(ADDR(.sbss) - 0) { *(.sbss) *(.scommon) } . = ALIGN(0); .bss : AT(ADDR(.bss) - 0) { *(.bss..page_aligned) *(.dynbss) *(.bss) *(COMMON) } . = ALIGN(0); __bss_stop = .;
_end = .;
.stab 0 : { *(.stab) } .stabstr 0 : { *(.stabstr) } .stab.excl 0 : { *(.stab.excl) } .stab.exclstr 0 : { *(.stab.exclstr) } .stab.index 0 : { *(.stab.index) } .stab.indexstr 0 : { *(.stab.indexstr) } .comment 0 : { *(.comment) }
.comment 0 : { *(.comment) }
}在我的環境中,它的值為0xc116c517。
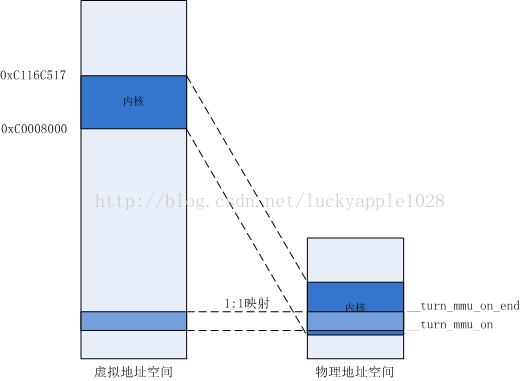
接著將r7或上r8得到First-leveldescriptor儲存到r3中(該值的高12位為0),然後計算核心結束虛擬地址對應應頁表項的實體地址儲存到r6中。接下來的程式碼將r0~r6中的頁表項迴圈迴圈填充上需要對映的First-level descriptor,每一次迴圈都會將r3+1<<SECTION_SHIFT,即加上基地址增量。建立對映表後的記憶體對映關係如下:
/*
* Then map boot params address in r2 if specified.
* We map 2 sections in case the ATAGs/DTB crosses a section boundary.
*/
mov r0, r2, lsr #SECTION_SHIFT
movs r0, r0, lsl #SECTION_SHIFT
subne r3, r0, r8
addne r3, r3, #PAGE_OFFSET
addne r3, r4, r3, lsr #(SECTION_SHIFT - PMD_ORDER)
orrne r6, r7, r0
strne r6, [r3], #1 << PMD_ORDER
addne r6, r6, #1 << SECTION_SHIFT
strne r6, [r3]在對映完核心之後就需要對映核心啟動引數了,核心的啟動引數地址儲存在r2中。在前面的程式中已經對r2中啟動引數地址的有效性進行了驗證,如果無效則現在r2中的值就是0,將不做對映操作。
此處程式碼中的前兩行就是為了判斷該值是否為0,如果不為0才進行對映操作。
首先獲取啟動引數地址相對於物理RAM的偏移值並儲存到r3中,然後再對該值加上PAGE_OFFSET(0xc0000000)得到其所需對映到的虛擬地址,接著找到對應的頁表和生成First-level descriptor,最後連續寫入連續的兩項頁表項來完成2頁的對映。也就是說不論核心啟動引數有多大,這裡預設只對映2MB的記憶體。 mov pc, lr對映完3個記憶體區間後,我這裡過濾掉其他未定義的條件編譯項後直接看到程式碼中執行返回操作,初始頁表建立完成。
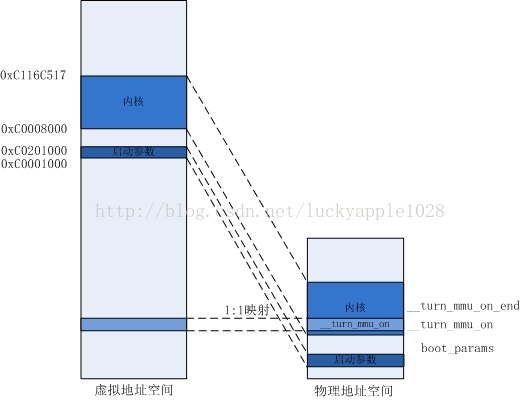
我的環境中核心啟動引數的地址為0x00000100,所以對映結果如下:
/*
* The following calls CPU specific code in a position independent
* manner. See arch/arm/mm/proc-*.S for details. r10 = base of
* xxx_proc_info structure selected by __lookup_processor_type
* above. On return, the CPU will be ready for the MMU to be
* turned on, and r0 will hold the CPU control register value.
*/
ldr r13, =__mmap_switched @ address to jump to after
@ mmu has been enabled
adr lr, BSYM(1f) @ return (PIC) address
mov r8, r4 @ set TTBR1 to swapper_pg_dir
ARM( add pc, r10, #PROCINFO_INITFUNC )
THUMB( add r12, r10, #PROCINFO_INITFUNC )
THUMB( mov pc, r12 )
1: b __enable_mmu這裡首先儲存__mmap_switched函式的連結地址(虛擬地址)到r13中,它是MMU開啟後的第一個要跳轉執行的虛擬地址。
然後儲存返回地址為下文中標號1處的地址,此處為b __enable_mmu;接著儲存r4中的頁表實體地址到r8寄存其中,最後就跳轉到架構相關的處理器初始化函式中執行初始化,為開啟MMU做準備工作;在執行完初始化函式後,將返回到lr儲存的地址執行,開啟MMU。
這裡的PROCINFO_INITFUNC巨集定義為16,此時PC的值正好為引數__cpu_flush的值
struct proc_info_list {
unsigned int cpu_val;
unsigned int cpu_mask;
unsigned long __cpu_mm_mmu_flags; /* used by head.S */
unsigned long __cpu_io_mmu_flags; /* used by head.S */
unsigned long __cpu_flush; /* used by head.S */
const char *arch_name;__v6_proc_info:
.long 0x0007b000
.long 0x0007f000
ALT_SMP(.long \
PMD_TYPE_SECT | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ | \
PMD_FLAGS_SMP)
ALT_UP(.long \
PMD_TYPE_SECT | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ | \
PMD_FLAGS_UP)
.long PMD_TYPE_SECT | \
PMD_SECT_XN | \
PMD_SECT_AP_WRITE | \
PMD_SECT_AP_READ
b __v6_setup在前文中已經看到,我的環境中在proc-v6.S已經定義了引數__cpu_flush的內容為b __v6_setup,所以這裡會執行__v6_setup函式:
/*
* __v6_setup
*
* Initialise TLB, Caches, and MMU state ready to switch the MMU
* on. Return in r0 the new CP15 C1 control register setting.
*
* We automatically detect if we have a Harvard cache, and use the
* Harvard cache control instructions insead of the unified cache
* control instructions.
*
* This should be able to cover all ARMv6 cores.
*
* It is assumed that:
* - cache type register is implemented
*/
__v6_setup:__v6_setup函式主要是配置CPU的暫存器,這裡不再詳細分析了,函式將會初始化TLB、Cache以及開啟MMU的一些必要的狀態(例如將頁表實體地址設定到TTB:Translation Table Base中),然後通過r0暫存器返回CP15 C1控制暫存器中的設定值。
/*
* Setup common bits before finally enabling the MMU. Essentially
* this is just loading the page table pointer and domain access
* registers.
*
* r0 = cp#15 control register
* r1 = machine ID
* r2 = atags or dtb pointer
* r4 = page table (see ARCH_PGD_SHIFT in asm/memory.h)
* r9 = processor ID
* r13 = *virtual* address to jump to upon completion
*/
__enable_mmu:
#if defined(CONFIG_ALIGNMENT_TRAP) && __LINUX_ARM_ARCH__ < 6
orr r0, r0, #CR_A
#else
bic r0, r0, #CR_A
#endif
#ifdef CONFIG_CPU_DCACHE_DISABLE
bic r0, r0, #CR_C
#endif
#ifdef CONFIG_CPU_BPREDICT_DISABLE
bic r0, r0, #CR_Z
#endif
#ifdef CONFIG_CPU_ICACHE_DISABLE
bic r0, r0, #CR_I
#endif完成了上面的準備工作後就要開啟MMU了,本質上這裡僅僅是載入了頁表指標和域訪問控制暫存器。
首先這裡根據核心配置選項再對r0中返回的CR15 CR1進行配置,這些巨集定義在arch/arm/include/asm/cp15.h中,表示了暫存器每一位的定義,其中部分內容如下:
#define CR_M (1 << 0) /* MMU enable */
#define CR_A (1 << 1) /* Alignment abort enable */
#define CR_C (1 << 2) /* Dcache enable */
#define CR_W (1 << 3) /* Write buffer enable */
#define CR_P (1 << 4) /* 32-bit exception handler */
#define CR_D (1 << 5) /* 32-bit data address range */
#define CR_L (1 << 6) /* Implementation defined */
#define CR_B (1 << 7) /* Big endian */
#define CR_S (1 << 8) /* System MMU protection */
#define CR_R (1 << 9) /* ROM MMU protection */
#define CR_F (1 << 10) /* Implementation defined */
#define CR_Z (1 << 11) /* Implementation defined */
#define CR_I (1 << 12) /* Icache enable */
#define CR_V (1 << 13) /* Vectors relocated to 0xffff0000 */
#define CR_RR (1 << 14) /* Round Robin cache replacement */
#define CR_L4 (1 << 15) /* LDR pc can set T bit */
#define CR_DT (1 << 16)
......例如,如果核心CONFIG_CPU_DCACHE_DISABLE,則這裡會清除CR_C位來使D-Cache失能等等。
#ifndef CONFIG_ARM_LPAE
mov r5, #(domain_val(DOMAIN_USER, DOMAIN_MANAGER) | \
domain_val(DOMAIN_KERNEL, DOMAIN_MANAGER) | \
domain_val(DOMAIN_TABLE, DOMAIN_MANAGER) | \
domain_val(DOMAIN_IO, DOMAIN_CLIENT))
mcr p15, 0, r5, c3, c0, 0 @ load domain access register接下來這裡設定域訪問控制暫存器,ARM處理器使用域管理記憶體訪問許可權,它將虛擬記憶體區域劃分為幾個區域,為每個區域附於訪問控制權限來進行保護和控制。
從手冊中看到,L1頁描述符中第[5:8]位標識所在的域(4位最大能表示16個域)。域訪問控制暫存器CP15 C3為一個32位暫存器:


其中每一項Dx佔兩位(共16項),表示該域的許可權,其含義如下:
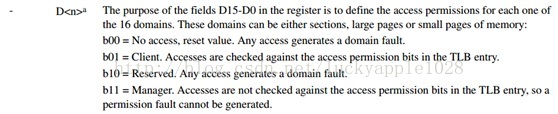
程式碼中domain_val巨集定義如下(arch/arm/include/asm/domian.h):
#define DOMAIN_KERNEL 0
#define DOMAIN_TABLE 0
#define DOMAIN_USER 1
#define DOMAIN_IO 2
......
#define DOMAIN_NOACCESS 0
#define DOMAIN_CLIENT 1
#ifdef CONFIG_CPU_USE_DOMAINS
#define DOMAIN_MANAGER 3
#else
#define DOMAIN_MANAGER 1
#endif
......
#define domain_val(dom,type) ((type) << (2*(dom)))
由於沒有配置CPU_USE_DOMAINS,所以不使用Manager許可權展開後r5和c3暫存器的值為
0x00000015,對應關係如下:
D0 —— DOMAIN_KERNEL\DOMAIN_TABLE—— DOMAIN_CLIENT
D1 —— DOMAIN_USER —— DOMAIN_CLIENT
D2 —— DOMAIN_IO —— DOMAIN_CLIENT
mcr p15, 0, r4, c2, c0, 0 @ load page table pointer
#endif
b __turn_mmu_on
ENDPROC(__enable_mmu)接下來將r4中儲存的頁表實體地址寫入C2的TTB中,其實這一步驟已經在__v6_setup中已經做過了,這裡重複了一次,需要注意的是r4中頁表實體地址的低5位已經被處理過了(頁表地址必須32位元組對齊),用於設定PD0和PD1等,C2暫存器如下:

在設定完TTB後,就要跳轉到__turn_mmu_on開啟MMU了。
ENTRY(__turn_mmu_on)
mov r0, r0
instr_sync
mcr p15, 0, r0, c1, c0, 0 @ write control reg
mrc p15, 0, r3, c0, c0, 0 @ read id reg
instr_sync
mov r3, r3
mov r3, r13
mov pc, r3
__turn_mmu_on_end:這裡首先將前面配置過的r0暫存器寫入C1暫存器中,如此MMU就被啟動了,然後將前面儲存在r13中的__mmap_switched函式的連結地址(虛擬地址)賦值到r3中,最後跳轉到__mmap_switched函式執行。
注意:由於在執行461行程式碼(mcr p15, 0, r0, c1, c0, 0)後MMU已經開啟了,CPU在取指時已經採用虛擬地址,需經過頁表的轉換,但是此時的PC暫存器的值卻還是按原來的順序取指(例如在執行461行程式碼時,我的環境中PC的值為0x004333a0+8),也即如果不對__turn_mmu_on函式進行線性1:1對映的話,0x00XXXXXX處的地址無法解析,程式將無法繼續執行。
/*
* The following fragment of code is executed with the MMU on in MMU mode,
* and uses absolute addresses; this is not position independent.
*
* r0 = cp#15 control register
* r1 = machine ID
* r2 = atags/dtb pointer
* r9 = processor ID
*/
__INIT
__mmap_switched:
adr r3, __mmap_switched_data
ldmia r3!, {r4, r5, r6, r7}
cmp r4, r5 @ Copy data segment if needed
1: cmpne r5, r6
ldrne fp, [r4], #4
strne fp, [r5], #4
bne 1b在跳轉到__mmap_switched後,頁表建立完畢,MMU處於啟用狀態,將使用絕對地址執行,不再採用位置無關程式碼,所以從這裡開始也就不需要再區分連結地址和實際的執行實體地址了。
首先將__mmap_switched_data的地址儲存到r3中,然後將__data_loc、_sdata、__bss_start和_end變數的地址儲存到r4、r5、r6和r7暫存器中。注意r3後面的歎號,r3的值會遞增。
.align 2
.type __mmap_switched_data, %object
__mmap_switched_data:
.long __data_loc @ r4
.long _sdata @ r5
.long __bss_start @ r6
.long _end @ r7
.long processor_id @ r4
.long __machine_arch_type @ r5
.long __atags_pointer @ r6
#ifdef CONFIG_CPU_CP15
.long cr_alignment @ r7
#else
.long 0 @ r7
#endif
.long init_thread_union + THREAD_START_SP @ sp
.size __mmap_switched_data, . - __mmap_switched_data它們的地址值在我的環境中如下:
c05ab2ac <__mmap_switched_data>:
c05ab2ac: c1080000 mrsgt r0, (UNDEF: 8)
c05ab2b0: c1080000 mrsgt r0, (UNDEF: 8)
c05ab2b4: c10bccec smlattgt fp, ip, ip, ip
c05ab2b8: c116c518 tstgt r6, r8, lsl r5然後比較__data_loc和_sdata的值是否一致,若不一致則需要拷貝資料段。其中__data_loc是核心映象中資料段的儲存位置,在開啟CONFIG_XIP_KERNEL後該值不等於_sdata值,在vmlinux.lds.S中定義如下:
#ifdef CONFIG_XIP_KERNEL
__data_loc = ALIGN(4); /* location in binary */
. = PAGE_OFFSET + TEXT_OFFSET;
#else
__init_end = .;
. = ALIGN(THREAD_SIZE);
__data_loc = .;
#endif
.data : AT(__data_loc) {
_data = .; /* address in memory */
_sdata = .;而_sdata是資料段的連結位置。若開啟CONFIG_XIP_KERNEL,則這兩個值不等,所以需要將資料段拷貝到連結地址處(在RAM中)。在我的環境中,這兩個值一致,不需要拷貝。
mov fp, #0 @ Clear BSS (and zero fp)
1: cmp r6, r7
strcc fp, [r6],#4
bcc 1b
ARM( ldmia r3, {r4, r5, r6, r7, sp})
THUMB( ldmia r3, {r4, r5, r6, r7} )
THUMB( ldr sp, [r3, #16] )
str r9, [r4] @ Save processor ID
str r1, [r5] @ Save machine type
str r2, [r6] @ Save atags pointer
cmp r7, #0
bicne r4, r0, #CR_A @ Clear 'A' bit
stmneia r7, {r0, r4} @ Save control register values
b start_kernel
ENDPROC(__mmap_switched)接下來首先清空BSS段,然後將processor_id、__machine_arch_type、__atags_pointer、cr_alignment和init_thread_union + THREAD_START_SP值依次讀取到r4、r5、r6、r7和sp中。其中processor_id、__machine_arch_type和__atags_pointer是定義在arch/arm/kerne/setup.c中的全域性變數,分別用於儲存處理器ID、bootloader傳入的機器ID和啟動引數地址。
然後依次將r9、r1和r2中儲存的相應引數寫入到這些全域性變數中去,以便後面執行start_kernel之後的程式中使用到。
接著判斷C7中的值是否為0,由於我的環境中已經配置了CONFIG_CPU_CP15,所以該值不為0,儲存的是cr_alignment全域性變數的地址。cr_alignment全域性變數被定義在arch/arm/kernel/entry-armv.S中,和他一起使用的還有cr_no_alignment。他們分別被用來儲存啟用和禁用“A域”的CP15 C1暫存器值。


“A域”的作用是控制是否啟用訪問對齊檢查,若開啟,在未對齊的訪問記憶體會發生data abort trap。程式中分別將啟用A域和禁用A域的C1暫存器值儲存到cr_alignment和cr_no_alignment全域性變數中以備後續使用。
最後跳轉到start_kernel函式進行進一步的初始化動作,核心啟動的彙編部分到這裡結束。最後總結一下這部分主要完成了以下初始化:
(1)驗證處理器ID、核心啟動引數等地址的有效性;
(2)建立初始頁表,完成核心程式碼、啟動引數和核心啟動MMU程式碼這3部分記憶體對映;
(3)開啟MMU並儲存引數。
參考文獻:1、《ARM Linux核心原始碼剖析》
2、《ARM11 資料手冊》
相關推薦
ARM Linux啟動流程分析——start_kernel前啟動階段(彙編部分)
本文整理了ARM Linxu啟動流程的第二階段——start_kernel前啟動階段(彙編部分),核心版本為3.12.35。我以手上的樹莓派b(ARM11)為平臺示例來分析Linux核心在自解壓後到跳轉執行start_kernel之前所做的主要初始化工作:包括引數有效性驗證
Linux核心原始碼分析--系統時間初始化(kernel_mktime()函式)
從boot檔案中的幾個彙編程式執行後跳轉到init檔案中的main.c程式開始繼續執行,該main.c函式式為系統執行的環境進行初始化的。首先來看系統時間的初始化(因為系統時間的初始化開始程式就在init檔案中),其中主要還是由kernel中的mktime.
linux-2.6.22.6內核啟動流程分析之配置
linux 分享圖片 src image 比較 文件包含 子目錄 2.6 config 配置過程最終結果是生成.config文件,我們想要對配置的目的有很清楚的了解,必須先對.config文件進行分析。通過cd命令切換到linux-2.6.22.6內核目錄,輸入vi .co
Linux核心啟動流程分析(一)
1. 依據arch/arm/kernel/vmlinux.lds 生成linux核心原始碼根目錄下的vmlinux,這個vmlinux屬於未壓縮,帶除錯資訊、符號表的最初的核心,大小約23MB; 命令:arm-linux-gnu-ld -o vmlinux -T a
專題4-我是bootloader設計師-Souce Insight+ARM啟動流程分析
一、bootloader設計藍圖 寫在前面:不想當將軍的士兵不是好士兵,不想當設計師的程式設計師不是好程式設計師 1、bootloader的作用 就像航天器的助推器,將航天器帶到指定的軌道。(啟動linux核心) 程式碼包括兩部分: 第一部分程式碼主要
Linux 的開機啟動流程分析
幾個名詞 CMOS CMOS的主要功能為記錄主機板上面的重要引數, 包括系統時間、CPU 電壓與頻率、各項裝置的 I/O 地
Android5 Zygote 與 SystemServer 啟動流程分析
進一步 null 正常的 rtb 這樣的 ket constant vml resp Android5 Zygote 與 SystemServer 啟動流程分析 Android5 Zygote 與 SystemServer 啟動流程分析 前言 zy
開機啟動流程分析
boot 啟動流程 本節索引 在對系統啟動流程進行分析的時候,我想你一定是對系統有了一定的了解。系統的啟動目前來講大都為串行接力的方式來啟動。而所謂的並行方式的啟動方式也是某一個階段的並行。所以我按照系統啟動的順序來把文章連綴起來。 * BIOS階段 * BootLoader階段
kexec 內核快速啟動流程分析
-- 令行 並且 內存 tab 執行過程 family use -a 一、命令行 1. kexec -l $kpwd --append="$arg" 其中$kpwd =目標內核的路徑 $arg =傳給內核的參數,與/proc/cmdline一致時表示重啟現有內核
從0移植uboot (二) _啟動流程分析
title tco ret 沒有 返回 ips css location config 來源:Linux社區 作者:xiaojiang1025 : http://www.linuxidc.com/Linux/2017-02/141019.htm 經過
u-boot.2012.10——mini2440(二、啟動流程分析)
我們 分享 默認 從數據 中斷 改變 處理 mini2440 https 參考資料:https://blog.csdn.net/suiyuan19840208/article/details/7239949 1、第一階段功能 * 硬件設備初始化 * 加載u-boot
GEF入門實例_總結_04_Eclipse插件啟動流程分析
理解 viso inf targe get ica order workbench 註意 一、前言 本文承接上一節:GEF入門實例_總結_03_顯示菜單和工具欄 註意到app目錄下的6個類文件。 這6個文件對RCP應用程序而言非常重要,可能我們現在對這幾個文件的理
[Abp 源碼分析] 一、Abp 框架啟動流程分析
arch rep man job dsi 法則 依賴 gconf dep Abp 不一定僅用於 Asp.Net Core 項目,他也可以在 Console 與 WinFrom 項目當中進行使用,所以關於啟動流程可以分為兩種,一種是 Asp.Net Core 項目的啟動流程
Linux進程啟動過程分析do_execve(可執行程序的加載和運行)---Linux進程的管理與調度(十一)
[] flag 表示 conn nali 最終 roc 不同的 recursion execve系統調用 execve系統調用 我們前面提到了, fork, vfork等復制出來的進程是父進程的一個副本, 那麽如何我們想加載新的程序, 可以通過execve來加載和啟動新的程
Flink on Yarn模式啟動流程分析
cin XML images ont list action -i 多個 信息 此文已由作者嶽猛授權網易雲社區發布。歡迎訪問網易雲社區,了解更多網易技術產品運營經驗。Flink On Yarn 架構Paste_Image.png前提條件首先需要配置YARN_CONF_DIR
Spark2.2.2原始碼解析: 3.啟動worker節點啟動流程分析
本文啟動worker節點啟動流程分析 啟動命令: ${SPARK_HOME}/sbin/start-slave.sh spark://sysadmindeMacBook-Pro.local:7077 檢視start-slave.sh
Android9.0 Activity啟動流程分析(二)
文章目錄 1、ActivityThread的main函式 2. AMS的attachApplication函式 2.1 Part-I 2.2 Part-II 2.2.1 ApplicationThread的bindApp
Android9.0 Activity啟動流程分析(一)
1、ActivityRecord、TaskRecord、ActivityStack和ActivityDisplay介紹 本篇文章是基於Android refs/tags/android-9.0.0_r8分支的程式碼進行分析的 在分析Activity啟動的原始碼之前先介紹一下Act
s5pv210 -uboot(三)SD卡啟動流程分析
https://blog.csdn.net/wangweijundeqq/article/details/78886155 --------------------- 本文來自 MrT_WANG 的CSDN 部落格 ,全文地址請點選:https://blog.csdn.net
Android 虛擬機器簡單介紹——ART、Dalvik、啟動流程分析
Android 虛擬機器方面的知識,我是通過《深入理解 Android 核心設計思想》來學習的,內容特別多(只有一章,但有 160 頁),但感覺和 Android 開發有些偏了,因此很多內容都沒有認真去看,比如 EFL 格式等,這裡只是選取了一些感覺比較重要的做