
ROS Indigo安裝和配置
簡述:
ROS (Robot Operating System,機器人作業系統),提供一系列程式庫和工具以幫助軟體開發者建立機器人應用軟體。
它提供了硬體抽象、裝置驅動、函式庫、視覺化工具、訊息傳遞和軟體包管理等諸多功能。
ROS遵循BSD開源許可協議。
ROS 是寄生在Linux 作業系統下的。
對ROS相容性最好的當屬 Ubuntu 作業系統,最好是本機是Ubuntu。
每一個ROS版本都對應著一個或兩個對應的Ubuntu版本:
ROS釋出日期 ROS版本 對應Ubutnu版本 2016.3 ROS Kinetic Kame Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) 2015.3 ROS Jade Turtle Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) 2014.7 ROS Indigo Igloo Ubuntu 14.04 (Trusty) 2013.9 ROS Hydro Medusa Ubuntu 12.04 LTS (Precise) 2012.12 ROS Groovy Galapagos Ubuntu 12.04 (Precise) ... ... ... 本人的執行環境:
系統: Ubuntu 14.04.5 amd64(下載)
ROS: ROS Indigo Igloo
如果你安裝的是Ubuntu 16.04
,只需要把下面所有出現 *-indigo-* 的地方換成 *-kinetic-*就好了。
1、 安裝ROS
請確保你的系統可以正常上網。
1 >軟體中心配置
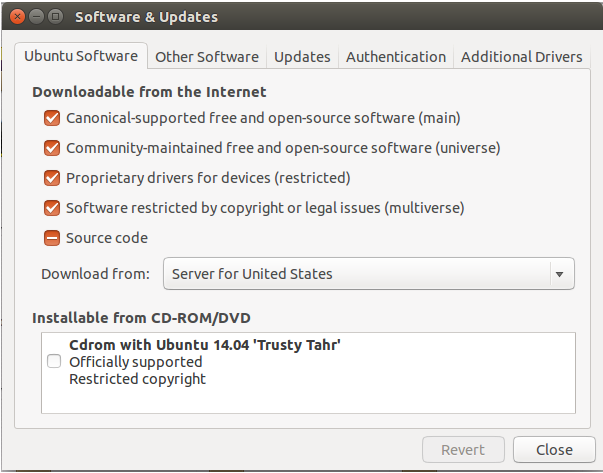
① 首先開啟軟體和更新對話方塊, 配置Ubuntu 的軟體源。
② 配置Ubuntu要求允許接受 restricted、 universe和 multiverse 的軟體源。
③ “UbuntuSoftware Center” → “Edit” → “Software& Updates”,開啟“Software& Updates”對話方塊,
④ 配置成如下圖所示即可,一般情況下,這些配置都是預設
的。
2 > 新增軟體源
① 開啟一個控制檯(Ctrl + Alt + T),輸入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
有了正確的軟體源,作業系統便會根據命令自動安裝軟體② 設定金鑰
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
3 > 安裝ROS
① 首先確保系統軟體處於最新版
$ sudo apt-get update
② 安裝ROS
在ROS中有許多不同的函式庫和工具,建議使用完全安裝,也可以根據自己的要求分別安裝。
完全安裝時的工具包括:
ROS
rqt
視覺化環境rviz(即3D視覺化工具)
通用機器人庫robot-generic libraries
2D(如stage)和3D(如Gazebo)模擬環境2D/3D simulators
導航功能包集navigation and 2D/3D(移動、定位、地圖繪製、機械臂控制)
感知庫perception(如視覺、鐳射雷達、RGB-D攝像頭等)。
tf(座標變換系統)
完整版安裝命令(推薦):
$ sudo apt-get install ros-indigo-desktop-full桌面版安裝命令:
$ sudo apt-get install ros-indigo-desktop
基礎版安裝命令:
$ sudo apt-get install ros-indigo-ros-base
安裝完成後,可以用下面的命令來檢視可使用的包:
$ apt-cache search ros-indigo
至此,雖然是安裝完了,但是還不能用ROS,繼續......
2、初始化ROS
1 > 首先初始化rosdep
$ sudo rosdep init $ rosdep update
2 > 安裝rosinstall
rosinstall命令是一個非常重要的命令,使用這個命令可以輕鬆下載許多ROS軟體包
$ sudo apt-get install python-rosinstall還可以安裝其他依賴項(可選項):
$ sudo apt-get install python-rosinstall-generator python-wstool build-essential
3 > 初始化環境變數
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc # 使環境變數設定立即生效 $ source ~/.bashrc
注意:.bashrc檔案是在當前系統使用者的home目錄下。
4 > 提醒一下,ros中有很多第三方外掛的安裝格式是
$ sudo apt-get install ros-indigo-...
5 >簡單測試ROS
① 確保正確配置了指令碼環境
檢查是否有ROS_ROOT 和ROS_PACKAGE_PATH這些環境變數:export | grep ROS
[email protected]:~# export | grep ROS declare -x ROSLISP_PACKAGE_DIRECTORIES="" declare -x ROS_DISTRO="indigo" declare -x ROS_ETC_DIR="/opt/ros/indigo/etc/ros" declare -x ROS_MASTER_URI="http://localhost:11311" declare -x ROS_PACKAGE_PATH="/opt/ros/indigo/share:/opt/ros/indigo/stacks" declare -x ROS_ROOT="/opt/ros/indigo/share/ros"如果沒有,就需要source 一些setup.*sh檔案。
例如在Ubuntu上使用apt工具安裝ROS,可以使用:
$ source /opt/ros/indigo/setup.bash注意:當你用像apt這樣的軟體包安裝管理器安裝ROS,那麼這些軟體包使用者是沒有權利的去編輯的。
當建立一個ROS package和處理一個ROS package時,你應該始終選擇一個你有許可權工作的目錄作為工作目錄。
② 測試ROS
$ roscore
看看顯示 startedcore service [/rosout] 了沒有?如果顯示了,那麼恭喜你,成功了,即完成了ROS的安裝和配置;如果沒有,重啟一下再試試,呵呵~
③執行ROS示例程式
分別開啟3個終端,並分別輸入指令(每個終端輸入一條),建議在當前系統使用者的home目錄下執行這些指令:
$ roscore $ rosrun turtlesim turtlesim_node $ rosrun turtlesim turtle_teleop_key
如果在非當前系統使用者的home目錄下輸入指令後會顯示command not found,那請先輸入source指令:
$ source /opt/ros/indigo/setup.bash
選擇輸入turtle_eleop_key的終端,並使用方向鍵控制烏龜的移動。

6 > 瞭解環境設定檔案
環境設定檔案可以來自不同的地方:
使用package管理器安裝的ROS package提供setup.*sh檔案;
rosbuild workspace使用像rosws這樣的工具提供setup.*sh檔案;
setup.*sh檔案在編譯和安裝catkin package時作為副產品建立。
注意:rosbuild和catkin是兩種組織和編譯ROS程式碼的方式,
前者簡單易用,後者更加複雜但是提供更多靈活性尤其是對那些需要去整合外部程式碼或者想釋出自己軟體的人
3、建立ROS工作環境
1 > 對於ROS Groovy和之後的版本可以參考以下方式建立catkin工作環境。在shell中執行:
$ source /opt/ros/indigo/setup.bash $ mkdir -p ~/catkin_ws/src //連續建立兩個目錄 $ cd ~/catkin_ws/src //進入目錄 $ catkin_init_workspace //初始化工作空間建立CMakeLists.txt
2 > 可以看到在src資料夾中可以看到一個CMakeLists.txt的連結檔案,即使這個工作空間是空的(在src中沒有package),仍然可以建立一個工作空間
$ cd ~/catkin_ws/ $ catkin_make成功執行會出現:
-- Build files have been written to: /home/hebbe/catkin_ws/build #### #### Running command: "make -j1 -l1" in "/home/hebbe/catkin_ws/build" ####
3 > catkin_make命令可以非常方便的建立一個catkin工作空間。在你的當前目錄中可以看到有build和devel兩個資料夾,在devel資料夾中可以看到許多個setup.*sh檔案。啟用這些檔案都會覆蓋你現在的環境變數,想了解更多,可以檢視文件catkin。在繼續下一步之前先啟動你的新的setup.*sh檔案
$ source devel/setup.bash
4 > 為了確認你的環境變數是否被setup指令碼覆蓋了,可以執行一下命令確認你的當前目錄是否在環境變數中
$ echo $ROS_PACKAGE_PATH
5 > 如果需要移除工作空間下的構建物件,執行以下命令:
cd ~/catkin_ws \rm -rf devel build install
之後可以重新構建資料包。
參考:
相關推薦
ROS Indigo安裝和配置
簡述: ROS (Robot Operating System,機器人作業系統),提供一系列程式庫和工具以幫助軟體開發者建立機器人應用軟體。 它提供了硬體抽象、裝置驅動、函式庫、視覺化工具、訊息
Ubuntu14.04安裝和配置ROS Indigo
lis des 運行 tps all href 使用 軟件源 sim Ubuntu安裝ROS教程 1、配置Ubuntu的軟件源 配置Ubuntu要求允許接受restricted、universe和multiverse的軟件源,可以根據下面的鏈接配置: https://h
ubuntu 14.04 (desktop amd 64) 安裝和配置ROS Indigo
安裝ROS 配置Ubuntu的軟體源 配置Ubuntu要求允許接受restricted、universe和multiverse的軟體源,可以根據下面的連結配置: https://help.ubuntu.com/community/Repositories/Ubuntu 配置成如下圖所示即可,一般情況下
Ubuntu14.04安裝和配置ROS Indigo(一)
安裝ROS 配置Ubuntu的軟體源 配置Ubuntu要求允許接受restricted、universe和multiverse的軟體源,可以根據下面的連結配置: 配置成如下圖所示即可,一般情況下,這些配置都是預設的。 軟體源配置 新增軟體源到sources.list
在Ubuntu14.04上安裝和配置ROS Indigo
1. Ubuntu和ROS版本的對應關係 Ubuntu 和 ROS 都存在不同的版本,其對應關係如下:。 每一個 ROS 版本都對應著一個或兩個對應的 Ubuntu 版本 ROS釋出日期 RO
ubuntu14.04+ROS(indigo) 安裝配置+虛擬機器VMware一站式配置教程(一)
Ubuntu14.04+ros(indigo)虛擬機器教程 1、安裝前置: 虛擬機器:VMware,具體版本最好是14,只要在360軟體管家中搜索安裝就好了。 安裝好了,在網上搜索一個序列。號就好 vmware12 5A02H-AU243
tk1刷機+ROS安裝+rplidar安裝和配置+turtlebot安裝和配置
上一篇中,在ROS虛擬機器中成功使用rplidar執行google cartographer後,下一步試圖把這些移植到實驗室的turtlebot上(tk1 + kobuki base)。本篇記錄一下移植過程和期間遇到的一些小問題。 tk1刷機 刷機的起因是剛開始直接在實
CloudStack+XenServer詳細部署方案 CloudStack管理節點的安裝和配置
cloudstack+xenserver詳細部署方案 cloudstack管理節點的安裝和配置CloudStack+XenServer詳細部署方案 CloudStack管理節點的安裝和配置本文將根據設計文檔, 安裝和配置CloudStack管理節點。本文只對配置流程和結果進行舉例說明, 具體 細節和配置操作請
centos7 mysql數據庫安裝和配置
web 大小 images etc 安裝mysql 安裝 commands 0 rows type 一、系統環境 yum update升級以後的系統版本為 [[email protected]/* */ yl]# cat /etc/redhat-relea
redis學習教程一《Redis的安裝和配置》
遠程服務 name 工具 列表 端口號 裏的 redis服務器 映射 tin redis學習教程一《Redis的安裝和配置》 Redis的優點 以下是Redis的一些優點。 異常快 - Redis非常快,每秒可執行大約110000次的設置(SET)操作,每秒大約可執
linux下jdk的安裝和配置
rac -s watermark img 使用 etc 文件拷貝 安裝 com 一、首先依據自己的系統位數在網上下載對應的jdk安裝包 下載地址例如以下:http://www.oracle.com/technetwork/java/javase/downloads/jd
linux中安裝和配置 jdk
jdk1 png images 下載 配置環境變量 ftp 當前 bsp 官網 01.去官網下載指定的jdk 02.使用xftp把下載好的文件 傳遞到 linux指定文件夾中03.進入指定的文件夾輸入tar -zxvf 文件名稱04.發現文件 05.進入文件c
eclipse maven 插件的安裝和配置
打印 屬性 配置文件 size text 官網下載 maven 應該 庫存 maven3 安裝: 安裝 Maven 之前要求先確定你的 JDK 已經安裝配置完畢。Maven是 Apache 下的一個項目。眼下最新版本號是 3.0.4。我用的也是這個。
Microsoft SQL Server for Linux安裝和配置
fig fcm zone linux for onf targe 查看 nbsp 客戶端 雖說mssql for linux早已經出來了,但原本沒有打算這麽早就去嘗試的,無奈之下還是得先嘗試用了,這裏分幾篇介紹我在用mssql for linux時遇到的問題,不得不說作
nfs安裝和配置
nfs nfs安裝 clas bind 修改配置文件 讀取 word 修改 source nfs安裝和配置 1,安裝軟件: yum -y install nfs-utils 註意,會自動安裝rpcbind 2,啟動nfs service rpcbind start serv
Gulp的安裝和配置
分享 插件 gis 鏡像文件 path cal user sta 全局 註意:要安裝倆次gulp(全局和本地) 之前由大牛幫忙配置的gulp來用。今天時間充裕,就和小夥伴一起動手配置gulp及其插件。第一步:建了一個Gulp文件夾,保存插件用於使用第二步:進入nodejs環
Maven實戰02_Maven的安裝和配置
order width maven 檢查 bin apach 執行文件 win10 .com 1:在Windows上安裝Maven 本人系統環境:win10 + JDK1.8 + apache-maven-3.3.9 在安裝Maven之前,首先要確定你
Centos7.3安裝和配置Tomcat8
localhost pat 1.10 logs .cn mage port oot -c 第一步:下載Tomcat8壓縮包 進入 http://tomcat.apache.org/download-80.cgi 下載tar.gz壓縮包 第二步:用ftp
Centos7.3安裝和配置Mysql5.7
mysql5 logs public mon grant https mysql sta -- 第一步:獲取mysql YUM源 進入mysql官網獲取RPM包下載地址 https://dev.mysql.com/downloads/repo/yum/
Centos7.3安裝和配置jre1.8
分享 運行環境 filezilla www 編輯 exp path 解壓 安裝和配置 在正式環境裏 我們可以不安裝jdk ,僅僅安裝Java運行環境 jre即可; 第一步:下載jre 我們去oracle官方下載下jre http://www.oracle