
-02-實時Prewitt邊緣檢測,640×480 @60fps【ARM NEON加速】
阿新 • • 發佈:2019-01-20
目的:使用NEON加速處理,實現實時Prewitt邊緣檢測,640×480 @60fps
硬體平臺Zynq SoC,FPGA邏輯實現視訊採集與視訊輸出,ARM SoC中使用NEON實現實時Prewitt邊緣檢測,整體實現640×480 @60fps 處理。影象輸出使用了三重緩衝,有效避免了影象撕裂。介面:HDMI輸入RGB彩色影象,VGA輸出灰度影象。
最終的邊緣檢測效果較好,Prewitt的NEON加速平均每幀計算時間很短,理論上可以做到120fps(包括記憶體資料的讀取、RGB轉灰度、Prewitt邊緣計算、檢測結果寫入記憶體的時間)
效果圖:
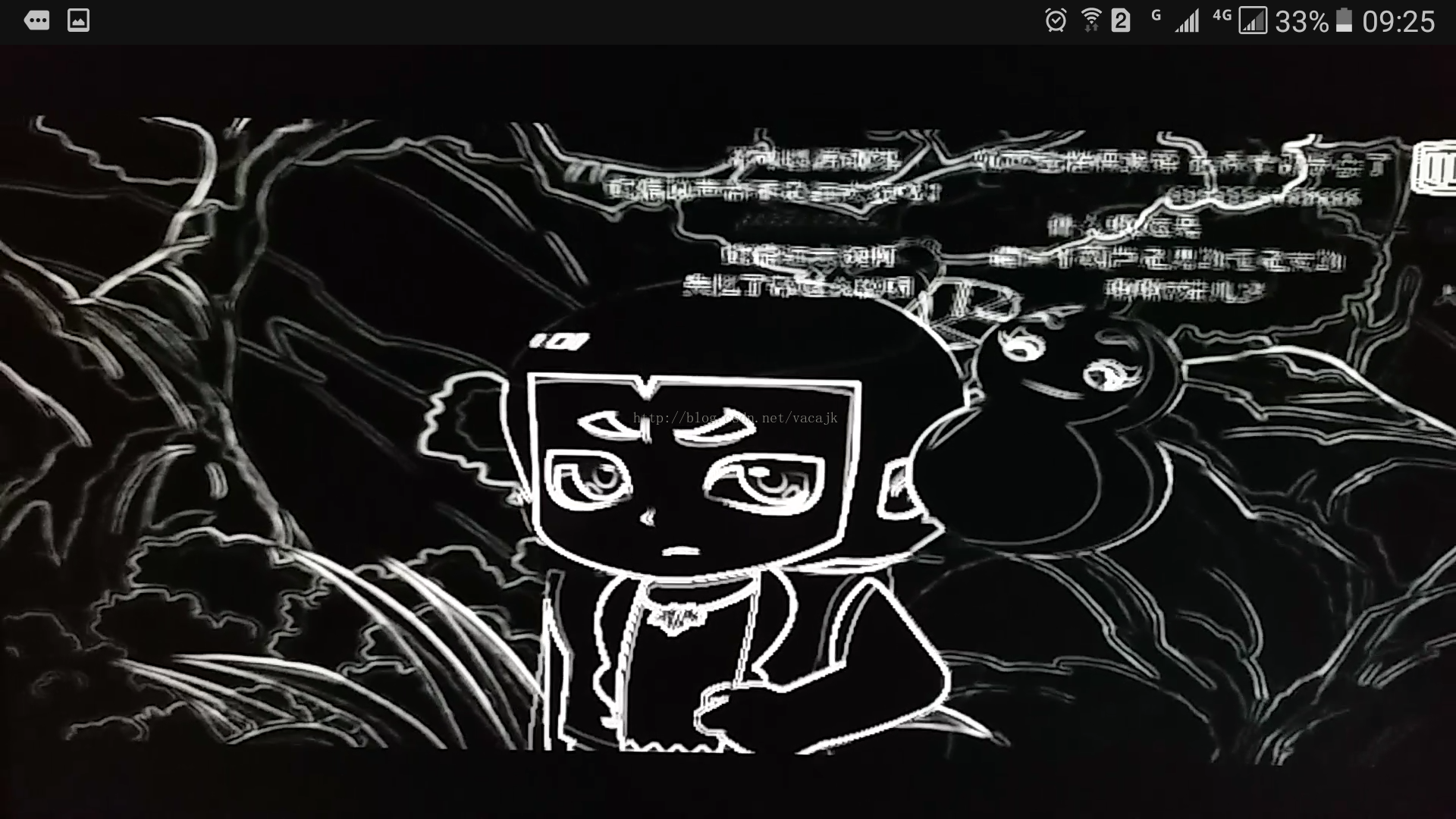

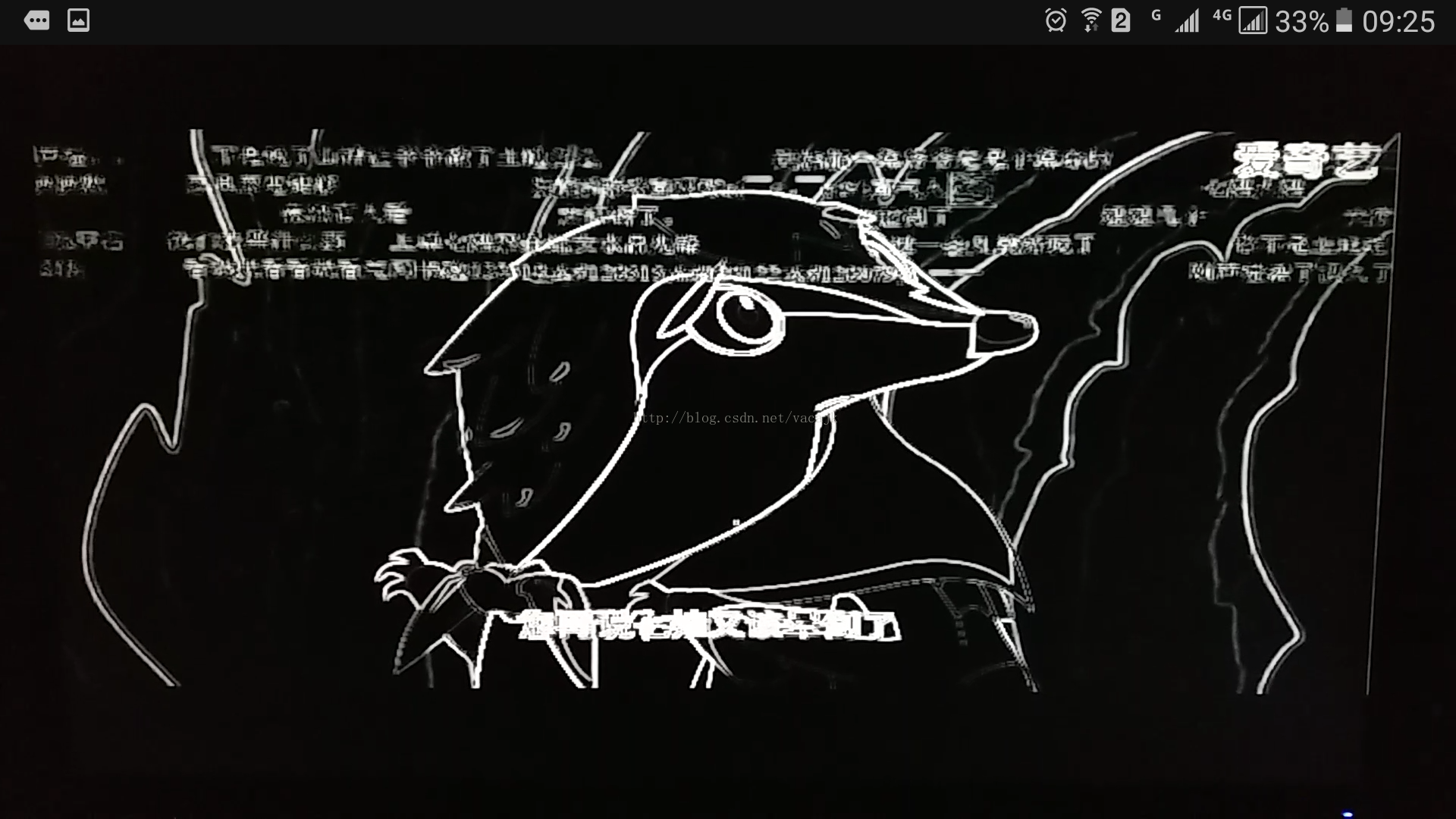
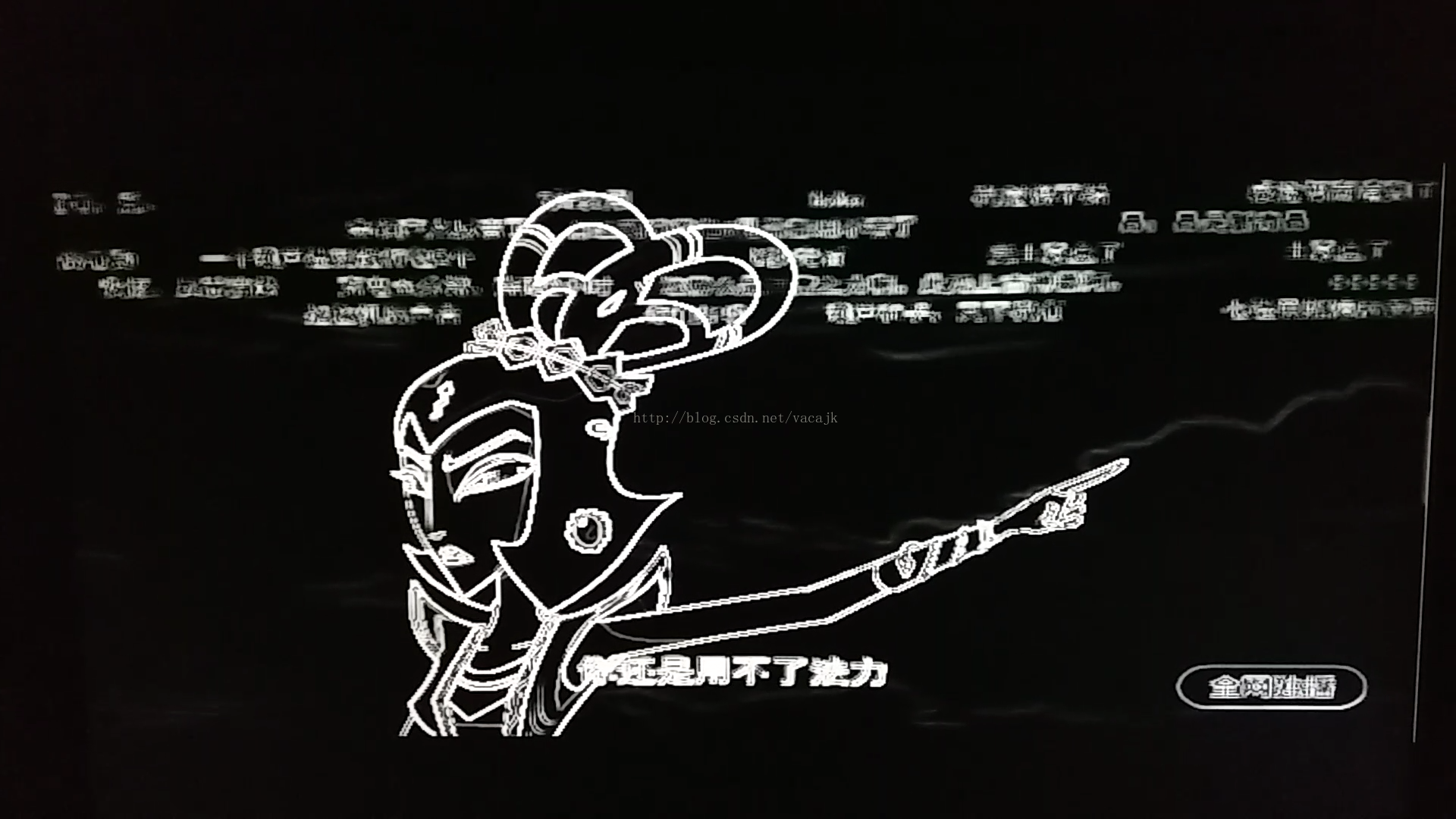
視訊:網址