
影象處理基礎知識之二
空域增強技術:
基礎知識1:
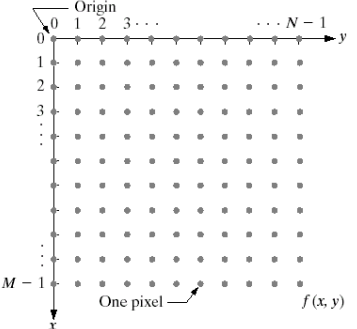
定義二維函式f(x,y),其中x,y是空間座標,f(x,y)是點(x,y)的幅值。
灰度影象是一個二維灰度(亮度)函式f(x,y);彩色圖片是由三個二維灰度函式f(x,y)組成。
畫素組成的二維排列可以用矩陣來表示:
1)對於單色(灰度)的影象而言,每個畫素的亮度用一個數值來表示,通常數值範圍是0~255之間,0表黑,255表示白,它的值處於黑白之間的灰度。
2)彩色影象可以用紅綠藍三原色的二維矩陣來組成,即有三個二維陣列。三元組的每個數值也在0~255之間,0表示相應的基色再該畫素中沒有,255表示相應的基色在該畫素中取得最大值。
基礎知識2:
影象增強
目標:改善影象質量/改善視覺效果
標準:相當主觀,因人而異
沒有完全通用的標準
可以有一些相對一致的準則
技術:“好”,“有用”的含義不相同
具體增強技術也可以大不相同
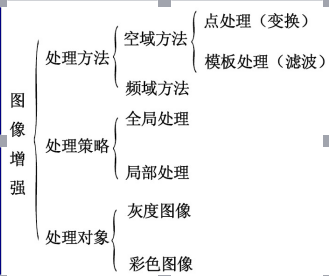
1 空域技術分類
1.1基礎概念
空域:指由畫素組成的空間
空域增強:

點操作:灰度點操作:

幾何操作:

點操作:輸出值僅與畫素灰度有關的處理稱為點處理:
(1) 藉助對一系列影象間的操作進行變換
(2) 將f (·)中的每個畫素按EH操作直接變換以得到g(·);
(3) 藉助f (·)的直方圖進行變換
模板操作(涉及鄰域):
1.2 影象間的運算:
影象間的運算指以影象為單位進行的操作,運算的結果是一幅新影象。
1.2.1 算術和邏輯運算
對整幅影象的算術和邏輯運算是逐畫素進行的,即在兩幅影象的對應(位置)畫素間進行。
A、算術運算
(1) 加法:記為p + q
(2) 減法:記為p – q
(3) 乘法:記為p * q
(4) 除法:記為p÷q
B、邏輯運算(只用於二值影象)
(1) 補(COMPLEMENT):記為NOT q
(2) 與(AND): 記為p AND q
(3) 或(OR): 記為p OR q
(2) 異或(XOR): 記為p XOR q
1.2.2 影象間運算的應用
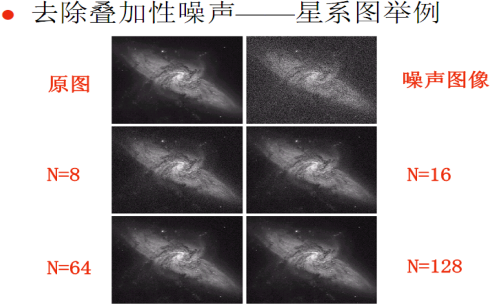
1)、畫素間的加法運算:

去除疊加性噪聲:
—去除不需要的疊加性圖案
—檢測同一場景兩幅影象之間的變化
—計算物體邊界的梯度

3)影象間乘法的應用:
--影象的區域性顯示,用二值模板影象與原影象做乘法

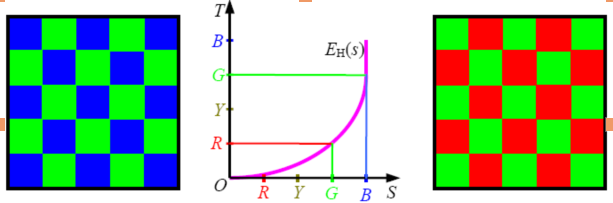
1.3直接灰度對映:直接灰度對映是一種點操作
f (x, y)中的每個畫素灰度按EH 操作直接變換以得到g(x, y)
1.3.1 灰度對映原理
直接灰度對映如上圖,利用E(s)函式,s:橫軸是原圖;T:縱軸是對映後的圖
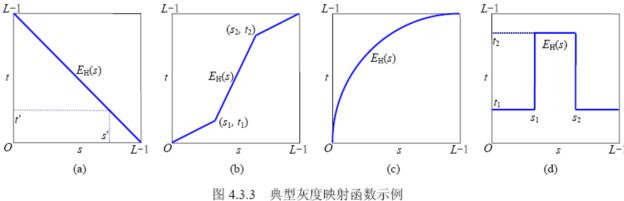
1.3.2 典型灰度對映
a)影象求反;b)增強對比度;c)動態範圍壓縮;d)灰度切分
1.3.3變換方法
反變換:s=(L-1)-r
[0,L-1]為影象的灰度級,反變換的作用是將黑的變白,白的變黑。

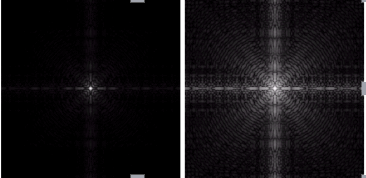
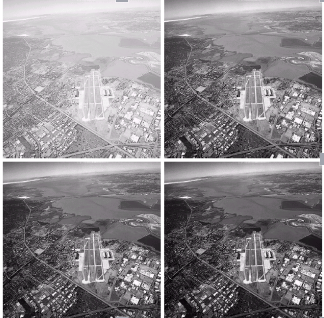
對數變換:s=clog(1+r),其中c是常數,r>=0 對數變換的作用是對原圖進行灰度壓縮
有些原圖太大,超過某些顯示裝置的動態範圍,如果直接使用原圖,則一部分細節可能會丟失,使用的辦法是對原圖進行灰度壓縮,如對數變換!下圖左邊是一副影象的傅立葉變換,右邊是在傅立葉變換的基礎上進行對數變換的結果圖。
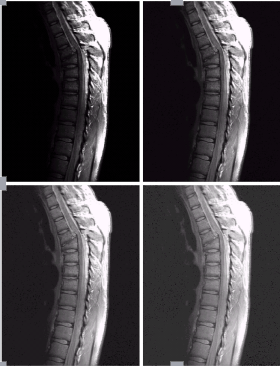
冪次變換:
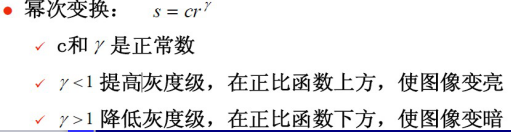
冪次小於1時擴充套件低灰度級,壓縮高灰度級,使影象變亮。這一點與對數變換十分相似。冪次大於1時擴充套件高灰度級,壓縮低灰度級,使影象變暗。
栗子:
下圖左邊是:a圖是原圖,b、c、d三幅圖對應的r依次是3、4、5。由於r>1,變換後使得影象變暗。
下圖右邊是:a圖是原圖,b、c、d三幅圖對應的r依次是0.6、0.4、0.3。由於r>1,變換後使得影象變亮。其中0.4時效果最好。
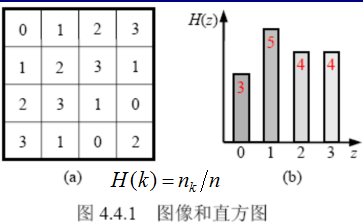
1.4 直方圖變換:直方圖是影象的一種統計表達,直方圖反映了圖中灰度的分佈情況:
灰度統計直方圖:1-D的離散函式提供了影象畫素的灰度值分佈情況。
設定一個有 L 個元素的陣列,對原圖的灰度值進行統計;灰度級的範圍是[0,L-1]
數字影象直方圖是離散函式h(rk)= nk 或者 p(rk)=nk/n
其中rk是第K個灰度級,rk的增量是1,K =0,1,2...L-1;nk是影象中灰度級為rk的畫素個數;n是畫素總數,後者將函式值正則化到[0,1]
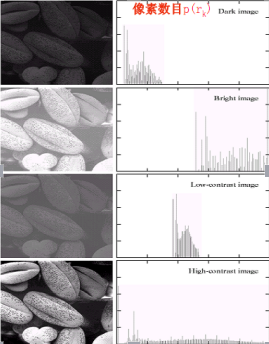
1.4.1直方圖均衡化:藉助直方圖變換實現(歸一的)灰度對映
基本思想:對在影象中畫素個數多的灰度級進行展寬,而對畫素個數少的灰度級進行縮減。從而達到清晰影象的目的。
變換原始影象的直方圖為均勻分佈==> 擴大動態範圍
使畫素灰度值的動態範圍最大==> 增強影象整體對比度(反差)
1.4.2直方圖規定化
5 濾波器:(線性平滑濾波器:減弱或消除影象中的噪聲)
空域濾波技術根據功能主要分為平滑濾波與銳化濾波。
平滑濾波能減弱或消除影象中的高頻率分量而不影響低頻分量,高頻分量對應影象中的區域邊緣等灰度值具有較大變化的部分,平滑濾波可將這些分量濾去減少區域性灰度起伏,使影象變得比較平滑。也可用於消除噪聲,或在提取較大目標前去除小的細節或將目標的小間斷連線起來。
在平滑濾波中,均值(線性)濾波可能帶來輪廓模糊的副作用,而中值濾波(非線性)濾波去噪效果優秀,相較均值濾波其模糊程度更低,尤其是針對脈衝噪聲的去噪,但有可能帶來影象性質的改變
銳化濾波正好相反,銳化濾波常用於增強被模糊的細節或目標的邊緣,強化影象的細節
空間濾波和空間濾波器的區別:
使用空間模板進行的影象處理稱為空間濾波;模板本身稱為空間濾波器
分類一:
線性濾波器:領域平均;卷積操作
非線性濾波器:中值濾波器
分類二:
平滑(低通)濾波器:模糊、消除噪聲
銳化(高通)濾波器:增強被模糊的細節
5.1 線性平滑濾波器
(1)領域平均:
(2)加權平均:中心繫數大,周圍係數小,表明一些畫素更為重要
作用:減小影象灰度的尖銳變化,減小噪聲;由於影象邊緣是由影象灰度銳 化變化引起的,所以也存在邊緣模糊的問題。
5.2非線性濾波
邏輯的、幾何的、代數的非線性濾波器
基於集合的、基於形狀的、基於排序的
(1)非線性平滑濾波器:
中值濾波:既除噪聲又保持細節
最大濾波器:尋找亮點
最小濾波器:尋找暗點
(2)非線性銳化濾波器:利用微分可以得到銳化影象(積分平滑影象)
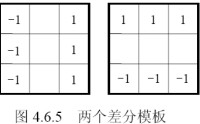
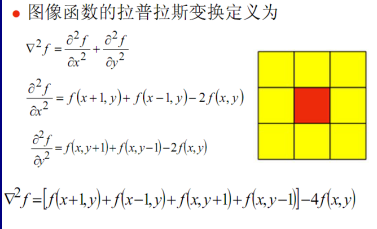
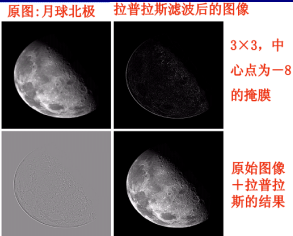
二階微分濾波器:拉普拉斯運算元
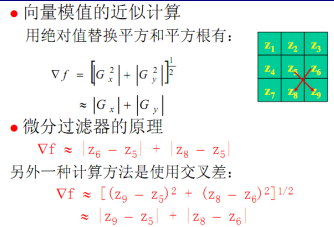
一階微分濾波器: 梯度運算元
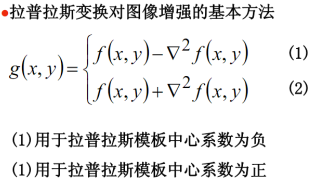
從模板形式容易看出,如果在影象中一個較暗的區域中出現了一個亮點,那麼用拉普拉斯運算就會使這個亮點變得更亮。影象中的邊緣就是那些灰度發生跳變的區域,所以拉普拉斯銳化模板中邊緣檢測中很有用。但該運算元也會增強影象中的噪聲,有時可將影象先進行平滑處理再用拉普拉斯運算元。將原始影象和拉普拉斯變換影象想家,既能保護拉普拉斯變換的效果,又能復原背景資訊。
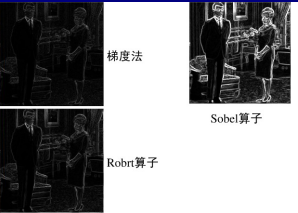
1)梯度運算元
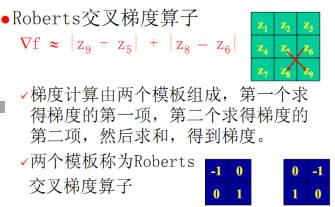
2)Roberts交叉梯度運算元
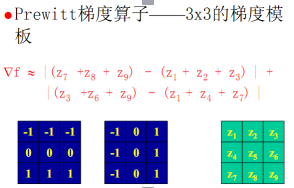
3)Prewitt梯度運算元
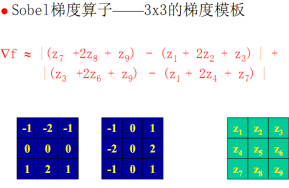
4)Sobel運算元
相關推薦
影象處理基礎知識之二
空域增強技術: 基礎知識1: 定義二維函式f(x,y),其中x,y是空間座標,f(x,y)是點(x,y)的幅值。 灰度影象是一個二維灰度(亮度)函式f(x,y);彩色圖片是由三個二維灰度函式f(x,
影象處理基礎知識(二)—— 中心矩求主軸方向
本文內容:主要介紹中心矩的定義,以及利用中心矩求取影象主軸方向。 1.4 matlab求取歸一化中心矩、hu不變矩和主軸方向 function test % atan(phi) 值域為[-90,90] atan2(y,x) 值域為[-180,180] %
影象處理基礎知識系列之二:核概率密度估計簡介
在這裡提出一個問題,假設資料不完整性一致,就是x我們不知道的取值數量是一定的,最後的概率密度估計圖形和什麼有關係呢?和bin有關。bin不同,最後的對應著概率密度估計就不同,如圖5和圖6。這個bin組距引數對應著公式(1)中的h,,,而公式(1)中的n對應著直方圖組數,(組距=bin=h,組數=n)具體關
Python基礎知識之二
== 當前 條件 nor style 嵌套使用 elif python基礎 lis 在上一篇寫了一些Python的基本語法,這篇主要是寫Python裏面的條件和循環和函數結構,不多說,直接進入正題。 Python的條件和循環語句: 1.if語句:
影象處理基礎知識筆記
一、噪聲 1.噪聲產生的原因:感測器源的質量、光照的影響、質量的影響 2.加性噪聲:與訊號關係相加 3.乘性噪聲:與訊號關係相乘,與信噪比有關,隨機性是變性 白噪聲:功率譜在整個頻域內分佈的噪聲 高斯噪聲:呈高斯型 二、濾波 eg:利用矩形框低通濾波器來濾波
1.MATLAB影象處理基礎知識
更多MATLAB影象處理視訊請點選 http://study.163.com/course/courseMain.htm?courseId=1003594013 在MATLAB中,基本資料結構為數列,大部分影象也是以數列的方式儲存的,例如,包含1024列768行的彩色影象
MATLAB影象處理基礎知識3 size函式
d = size(X); %返回矩陣的行數和列數,儲存在d中[m,n] = size(X)%返回矩陣的行數和列數,分別儲存在m和n中m = size(X,dim);%返回矩陣的行數或列數,dim=1返回行數,dim=2返回列數
影象處理基礎知識(持續更新中)
本文由本文由 @DavidHan@DavidHan出品,轉載請注明出處出品,轉載請注明出處 文章鏈接:文章鏈接:http://blog.csdn.net/David_Han008/article/details/78883641 前言 最近
【影象處理基礎知識】-混合高斯背景建模
0、高斯模糊原理-------------------------------------------------------分割線----------------------------------------------------------------1、一維高斯函式
【Unity基礎知識之二】支援iOS架構 armv6 armv7 armv7s arm64
釋出一個unity遊戲到iOS上,需要匯出XCode工程,編譯釋出,但是一個同樣的程式,在android上只有20M,在iOS上就60幾M了,一個跟android包會壓縮有關,另外就是因為指令集了。 目前ios的指令集有以下幾種: armv6 iPhone iPh
影象處理基礎知識(三)——根據主軸方向旋轉至水平或垂直方向
本文內容:主要介紹根據主軸方向,把影象旋轉至水平或垂直方向,以及求最小外接矩形長寬比。 1.旋轉至水平方向 2.旋轉至垂直方向 3. 求連通域最小外接矩形長寬比 for(i=0; i<B
算法基礎知識之樹、二叉樹,
pan rect nbsp 結構 src class wiki 子節點 資料 一、樹 把它叫做“樹”是因為它看起來像一棵倒掛的樹,也就是說它是根朝上,而葉朝下的。在計算機科學中,樹(英語:tree)是一種抽象數據類型(ADT)或是實作這種
算法基礎知識之樹、二叉樹
image inline cstyle width var mar span mes med 一、樹 把它叫做“樹”是因為它看起來像一棵倒掛的樹,也就是說它是根朝上,而葉朝下的。在計算機科學中,樹(英語:tree)是一種抽象數據類型(AD
Python 之 基礎知識(二)
break post elif true 滿足 賦值 隨機數 計數 spa 一、分支運算 在Python 2.x中判斷不等於還可以用<> if語句進階:elif if 條件1: ...... elif 條件2: ...... else:
影象處理特徵提取之(二):Haar特徵
1,Haar特徵: Haar特徵分為:邊緣特徵,線性特徵,中心特徵,對角線特徵。特徵模板內有白色和黑色兩種矩形,並定義該模板的特徵值為白色矩形畫素減去黑色矩形畫素和。Haar特徵值反映了影象的灰度變化情況。例如:臉部的一些特徵能有矩形特徵簡單的描述,如眼睛要比臉頰顏色深,鼻
React基礎知識之Ref回撥函式處理
程式碼地址請在github檢視,如果有新內容,我會定時更新,也歡迎您star,issue,共同進步 1.為DOM元素新增Ref react支援一個ref屬性,該屬性可以新增到任何的元件上。該ref屬性接收一個回撥函式,這個回撥函式在元件掛載或者解除安裝的時候
數字影象處理基礎之--畫素間的關係(鄰接/連通)
影象的畫素的意義 一幅影象,經過取樣和量化之後就可以得到數字影象。數字影象在儲存時,都是由單一的畫素儲存在儲存裝置中。畫素儲存順序是與畫素在數字圖片中原本所處在的物理位置相關,那麼就要了解畫素之間的一些基本關係。 在數字影象處理領域,存在著空間域和變換域的概念。數字影象處理
Open CV學習記錄(二十二)—影象處理基本知識
Mat 的初始化可以使用複製建構函式或者賦值運算子,不進行儲存畫素值的矩陣複製,只複製矩陣頭。 clone()和copyTo進行整體複製。 設定某部分割槽域,可以使用Rect或Range HSV把顏色分解成色調、飽和度和亮度,拋棄最後一個元素,使演算法對輸
PHP之新手自學基礎知識(二)——語法篇
1.PHP If…Else 語句 條件語句的三種情況: ● if 語句 - 在條件成立時執行程式碼 ● if…else 語句 - 在條件成立時執行一塊程式碼,條件不成立時執行另一塊程式碼 ● if…elseif….else 語句 - 在若干條
PHP基礎知識之————PDO預處理語句
轉載處:http://www.cnblogs.com/xiaohuochai/p/6133353.html 定義 在生成網頁時,許多PHP指令碼通常都會執行除引數之外,其他部分完全相同的查詢語句,針對這種重複執行一個查詢,每次迭代使用不同的引數情況,PDO提供了一種名為預處理語句(prepared st