
【Linux嵌入式】示波器分析I2C時序波形圖
對於嵌入式開發的朋友來說,I2C協議實在是再熟悉不過了,有太多的器件,採用的都是通過I2C來進行相應的設定。今天,我們就隨便聊聊這個I2C協議。
I2C協議中最重要的一點是I2C地址。這個地址有7位和10位兩種形式。7位能夠表示127個地址,而在實際使用中基本上不會掛載如此多的設定,所以很多裝置的地址都採用7位,所以本文接下來的說明都是基於此。
I2C還有一個很重要的概念,就是“主—從”。對於從裝置來說,它是啥都不幹的,更不會自動傳送資料;而主裝置,則是起到控制作用,一切都是從它開始。
除了GND以外,I2C有兩根線,分別是SDA和SCL,所有的裝置都是接到這兩根線上。那麼,這些裝置如何知道資料是傳送給它們呢?這就得依靠前面所說到的地址了。裝置I2C的地址是固定的,比如0x50,0x60等等。因為只能有127個地址,地址衝突是很常見的,所以一般裝置都會有一個地址選擇PIN,比如拉高時候為0x50,接地為0x60。如果無論拉高還是接地,都和別的晶片有衝突,那該怎麼辦呢?答案是:涼拌,沒辦法。遇到這種情況,只能換晶片了。
我們來看I2C協議中的資料傳輸時序圖:
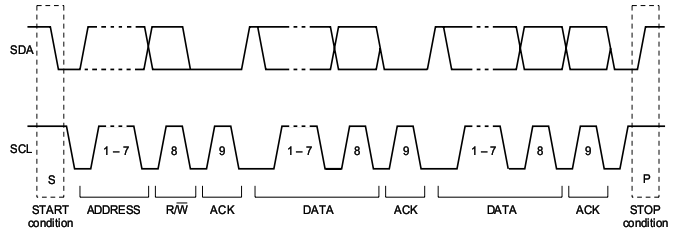
SCL是時鐘,SDA承載的是資料。當SDA從1變動到0,而SCL還是1時,表示開始資料傳輸。接下來的7位,就是裝置的地址。緊接著的是讀寫標誌,其為1時是讀取,為0則是寫。如果I2C總線上存在著和請求的地址相對應的裝置,則從裝置會發送一個ACK訊號通知主裝置,可以傳送資料了。接到ACK訊號後,主裝置則傳送一個8位的資料。當傳輸完畢之後,SCL保持為1,SDA從0變換到1時,標明傳輸結束。
從這個時序圖中可以看到,SCL很重要,並且哪個時鐘沿是幹嘛的,都是確定好的。比如,前面7個必定是地址,第8個是讀寫標誌,資料傳輸必須是8位,必須接個ACK訊號等等。
前面的時序圖並沒有標明資料傳輸的方向,我們現在看看寫操作的資料流向:
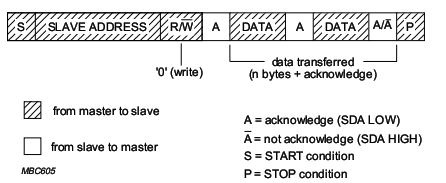
網格的是主裝置傳送的,白色格子是從裝置傳送的。從圖示中可以看到,對於寫操作,從裝置都只是傳送ACK進行確認而已。
而讀操作的資料流向,就有所不同,如圖:
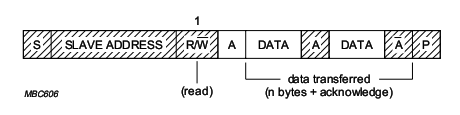
這時候,從裝置除了傳送ACK以外,緊跟著的還有資料。
我們用示波器來檢視波形圖,以便於理解。
I2C的概念原理網上都有就不說了,這裡只把我把兩個開發板通過I2C通訊的除錯經驗記錄分享一下。
I2C要求要有一個主裝置,負責發起請求和控制時鐘;其它為從裝置,通過裝置ID地址來識別並響應主裝置請求。主從裝置要輪流控制SDA。一開始我沒搞明白這一點,直接加了寫I2C資料程式碼,然後用示波器在SDA和SCL腳測量,卻只能找到些凌亂的波形,沒有預期的效果。後來把從裝置接上,兩邊寫好程式碼,互相有了響應,這才在示波器上看到波形。
這裡我找了一個主裝置往從裝置寫資料的例子,程式碼如下:
char buf[128];
int len;
strcpy(buf,"..huz_hello_i2c/n");
len=strlen(buf);
//deviceid: 0x3c
write_i2c(0x3c, buf , len);
接收端的程式碼比較簡單,就不貼了。
將示波器的X和Y分別接到SDA和SCL,得到波形並分析如圖:
從圖中可知時序如下:
- 由主機發起,在SCL為高電平時,SDA由高到低切變,形成開始訊號;
- 接著是7位地址和一位讀寫標誌,這裡7位地址為0111100,即0x3c,正是我們程式碼中設定的地址ID;最後一位為0表示寫操作;
- 接著在下一個時鐘,主機以高電平狀態釋放SDA,這時從機響應,將SDA拉低了;
- 接著是兩個8位資料00101110與響應,即0x2E,正是“.”號的ASCII碼,符合預期輸出;
- 還有其它資料和最後的停止位,圖中被截掉了。
從圖中可知,縱向一格是200mV,則SDA和SCL的電平大概就是350mV;由於訊號筆上設定了訊號x10,因此實際電平應該大概是3.5V(理論上應該是3.3V)。橫向一格是25us,10個時鐘週期大概用了4格,即4x25us=100us,平均每個時鐘週期是10us,可算出傳輸頻率為1/10us=100,000/s,即100k bps。
另外,對於讀從裝置內容,基本流程是主裝置先往從裝置寫一個命令,然後再輸出讀取命令,然後才由從裝置傳送資料。過程類似,不再具體分析了。
下圖示例中,主機先向從機寫了一個地址命令,然後重新開始並進入讀取週期。
分析波形可檢測出I2C通訊工作是否正常,是否符合預期,對我們程式設計除錯診斷有輔助作用。