
linux讀檔案過程-3.10.0-Start From read
從系統呼叫read開始,
其系統呼叫實現如下,傳入的引數是開啟的檔案控制代碼,使用者區緩衝池,讀取長度:
SYSCALL_DEFINE3(read, unsignedint, fd, char __user *, buf, size_t, count)
{
struct fd f = fdget_pos(fd);
ssize_t ret = -EBADF;
if (f.file) {
loff_t pos = file_pos_read(f.file);
ret = vfs_read(f.file, buf, count, &pos);
if
file_pos_write(f.file, pos);
fdput_pos(f);
}
return ret;
}
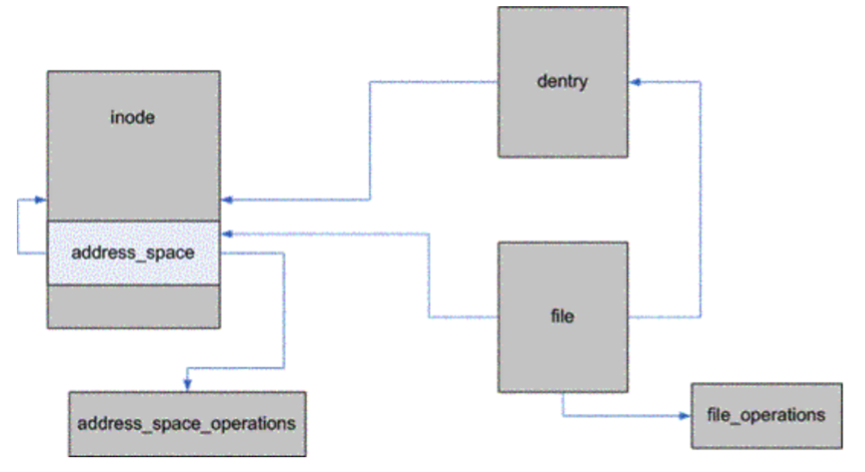
fd是檔案描述符是一個整型,對應一個檔案,其實是一個索引,關聯到一個struct file。
因為入參中是檔案描述符,所以需要通過fget_pos(fd)(->fdget->fget_light,current->files)函式來獲取file結構體。
fget_pos函式返回的是機構體struct fd,fd的定義如下,包含了file和flags:
struct
struct file *file;
unsignedint flags;
};
看到其中呼叫了vfs_read函式,引數是file,使用者層緩衝區和檔案偏移位置。
ssize_t vfs_read(struct file *file, char __user *buf, size_t count, loff_t *pos)
{
ssize_t ret;
if (!(file->f_mode & FMODE_READ))
return -EBADF;
if (!file->f_op || (!file->f_op->read && !file->f_op->aio_read))
return -EINVAL;
if (unlikely(!access_ok(VERIFY_WRITE, buf, count)))
return -EFAULT;
ret = rw_verify_area(READ, file, pos, count);
if (ret >= 0) {
count = ret;
if (file->f_op->read)
ret = file->f_op->read(file, buf, count, pos);
else
ret = do_sync_read(file, buf, count, pos);
if (ret > 0) {
fsnotify_access(file);
add_rchar(current, ret);
}
inc_syscr(current);
}
return ret;
}
先是判斷,檔案的模式是否可讀,以及其file_operations結構體中是否定義了read後者aio_read,如果沒有則返回。如果成功返回則給程序結構的ioac成員更新io情況。
使用file的f_op函式集,ext4則是結構體ext4_file_operations,定義如下,所以file->f_op->read函式就是do_sync_read函式。
conststruct file_operations ext4_file_operations = {
.llseek = ext4_llseek,
.read = do_sync_read,
.write = do_sync_write,
.aio_read = generic_file_aio_read,
.aio_write = ext4_file_write,
.unlocked_ioctl = ext4_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = ext4_compat_ioctl,
#endif
.mmap = ext4_file_mmap,
.open = ext4_file_open,
.release = ext4_release_file,
.fsync = ext4_sync_file,
.splice_read = generic_file_splice_read,
.splice_write = generic_file_splice_write,
.fallocate = ext4_fallocate,
};
如果是xfs檔案系統如下:
conststruct file_operations xfs_file_operations = {
.llseek = xfs_file_llseek,
.read = do_sync_read,
.write = do_sync_write,
.aio_read = xfs_file_aio_read,
.aio_write = xfs_file_aio_write,
.splice_read = xfs_file_splice_read,
.splice_write = xfs_file_splice_write,
.unlocked_ioctl = xfs_file_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = xfs_file_compat_ioctl,
#endif
.mmap = xfs_file_mmap,
.open = xfs_file_open,
.release = xfs_file_release,
.fsync = xfs_file_fsync,
.fallocate = xfs_file_fallocate,
};
那麼,我們進入到了,函式do_sync_read如下:
ssize_t do_sync_read(struct file *filp, char __user *buf, size_t len, loff_t *ppos)
{
struct iovec iov = { .iov_base = buf, .iov_len = len };
struct kiocb kiocb;
ssize_t ret;
init_sync_kiocb(&kiocb, filp);
kiocb.ki_pos = *ppos;
kiocb.ki_left = len;
kiocb.ki_nbytes = len;
ret = filp->f_op->aio_read(&kiocb, &iov, 1, kiocb.ki_pos);
if (-EIOCBQUEUED == ret)
ret = wait_on_sync_kiocb(&kiocb);
*ppos = kiocb.ki_pos;
return ret;
}
do_sync_read函式中會先初始化kiocb(kernel io control block),然後呼叫f_op->aio_read函式,在ext4中generic_file_aio_read。
在generic_file_aio_read函式呼叫generic_segment_checks檢測要寫的緩衝區是否有效,這種檢查在整個核心中都非常常見,如果不做檢測很容易導致指標異常而系統崩潰。
然後判斷是否是直接IO,如果是則會呼叫retval = mapping->a_ops->direct_IO(READ, iocb, iov, pos, nr_segs);
該函式的a_ops是address_space_ops,ext4的如下,其呼叫的direct_IO是ext4_direct_IO.
staticconststruct address_space_operations ext4_aops = {
.readpage = ext4_readpage,
.readpages = ext4_readpages,
.writepage = ext4_writepage,
.writepages = ext4_writepages,
.write_begin = ext4_write_begin,
.write_end = ext4_write_end,
.bmap = ext4_bmap,
.invalidatepage_range = ext4_invalidatepage,
.releasepage = ext4_releasepage,
.direct_IO = ext4_direct_IO,
.migratepage = buffer_migrate_page,
.is_partially_uptodate = block_is_partially_uptodate,
.error_remove_page = generic_error_remove_page,
};
另外xfs的如下:
conststruct address_space_operations xfs_address_space_operations = {
.readpage = xfs_vm_readpage,
.readpages = xfs_vm_readpages,
.writepage = xfs_vm_writepage,
.writepages = xfs_vm_writepages,
.set_page_dirty = xfs_vm_set_page_dirty,
.releasepage = xfs_vm_releasepage,
.invalidatepage_range = xfs_vm_invalidatepage,
.write_begin = xfs_vm_write_begin,
.write_end = xfs_vm_write_end,
.bmap = xfs_vm_bmap,
.direct_IO = xfs_vm_direct_IO,
.migratepage = buffer_migrate_page,
.is_partially_uptodate = block_is_partially_uptodate,
.error_remove_page = generic_error_remove_page,
};
如果不是,則呼叫函式do_generic_file_read,從磁碟讀取請求的頁並把它們複製到使用者態快取區。真正執行讀操作,是通過mapping->a_ops->readpage()來完成。
Address_space物件的readpage會負責啟用磁碟到頁之間的I/O資料傳輸。Ext4的readpage函式是ext4_readpage,會呼叫函式mpage_readpage.如果塊在磁碟上是連續的,就用單個bio,如果不連續就用不同的bio描述符來讀。
完事之後,由file_read_actor函式負責把頁中的資料拷貝到使用者態緩衝區中。
Submit_bio是一個關鍵函式,負責根據傳遞的bio例項建立一個新請求。並使用make_request_fn將請求置於驅動程式的請求佇列上。
之後就到塊層了,塊層會對這些請求進行合併、插入,從而提高效能。