
FFmpeg的HEVC解碼器原始碼簡單分析:CTU解碼(CTU Decode)部分-TU
=====================================================
HEVC原始碼分析文章列表:
【解碼 -libavcodec HEVC 解碼器】
=====================================================
本文分析FFmpeg的libavcodec中的HEVC解碼器的CTU解碼(CTU Decode)部分的原始碼。FFmpeg的HEVC解碼器呼叫hls_decode_entry()函式完成了Slice解碼工作。hls_decode_entry()則呼叫了hls_coding_quadtree()完成了CTU解碼工作。由於CTU解碼部分的內容比較多,因此將這一部分內容拆分成兩篇文章:一篇文章記錄PU的解碼,另一篇文章記錄TU解碼。本文記錄TU的解碼過程。
函式呼叫關係圖
FFmpeg HEVC解碼器的CTU解碼(CTU Decoder)部分在整個HEVC解碼器中的位置如下圖所示。

CTU解碼(CTU Decoder)部分的函式呼叫關係如下圖所示。

從圖中可以看出,CTU解碼模組對應的函式是hls_coding_quadtree()。該函式是一個遞迴呼叫的函式,可以按照四叉樹的句法格式解析CTU並獲得其中的CU。對於每個CU會呼叫hls_coding_unit()進行解碼。
hls_coding_unit()會呼叫hls_prediction_unit()對CU中的PU進行處理。hls_prediction_unit()呼叫luma_mc_uni()對亮度單向預測塊進行運動補償處理,呼叫chroma_mc_uni()對色度單向預測塊進行運動補償處理,呼叫luma_mc_bi()對亮度單向預測塊進行運動補償處理。
hls_coding_unit()會呼叫hls_transform_tree()對CU中的TU進行處理。hls_transform_tree()是一個遞迴呼叫的函式,可以按照四叉樹的句法格式解析並獲得其中的TU。對於每一個TU會呼叫hls_transform_unit()進行解碼。hls_transform_unit()會進行幀內預測,並且呼叫ff_hevc_hls_residual_coding()解碼DCT殘差資料。
hls_decode_entry()
//解碼入口函式 static int hls_decode_entry(AVCodecContext *avctxt, void *isFilterThread) { HEVCContext *s = avctxt->priv_data; //CTB尺寸 int ctb_size = 1 << s->sps->log2_ctb_size; int more_data = 1; int x_ctb = 0; int y_ctb = 0; int ctb_addr_ts = s->pps->ctb_addr_rs_to_ts[s->sh.slice_ctb_addr_rs]; if (!ctb_addr_ts && s->sh.dependent_slice_segment_flag) { av_log(s->avctx, AV_LOG_ERROR, "Impossible initial tile.\n"); return AVERROR_INVALIDDATA; } if (s->sh.dependent_slice_segment_flag) { int prev_rs = s->pps->ctb_addr_ts_to_rs[ctb_addr_ts - 1]; if (s->tab_slice_address[prev_rs] != s->sh.slice_addr) { av_log(s->avctx, AV_LOG_ERROR, "Previous slice segment missing\n"); return AVERROR_INVALIDDATA; } } while (more_data && ctb_addr_ts < s->sps->ctb_size) { int ctb_addr_rs = s->pps->ctb_addr_ts_to_rs[ctb_addr_ts]; //CTB的位置x和y x_ctb = (ctb_addr_rs % ((s->sps->width + ctb_size - 1) >> s->sps->log2_ctb_size)) << s->sps->log2_ctb_size; y_ctb = (ctb_addr_rs / ((s->sps->width + ctb_size - 1) >> s->sps->log2_ctb_size)) << s->sps->log2_ctb_size; //初始化周圍的引數 hls_decode_neighbour(s, x_ctb, y_ctb, ctb_addr_ts); //初始化CABAC ff_hevc_cabac_init(s, ctb_addr_ts); //樣點自適應補償引數 hls_sao_param(s, x_ctb >> s->sps->log2_ctb_size, y_ctb >> s->sps->log2_ctb_size); s->deblock[ctb_addr_rs].beta_offset = s->sh.beta_offset; s->deblock[ctb_addr_rs].tc_offset = s->sh.tc_offset; s->filter_slice_edges[ctb_addr_rs] = s->sh.slice_loop_filter_across_slices_enabled_flag; /* * CU示意圖 * * 64x64塊 * * 深度d=0 * split_flag=1時候劃分為4個32x32 * * +--------+--------+--------+--------+--------+--------+--------+--------+ * | | * | | | * | | * + | + * | | * | | | * | | * + | + * | | * | | | * | | * + | + * | | * | | | * | | * + -- -- -- -- -- -- -- -- --+ -- -- -- -- -- -- -- -- --+ * | | | * | | * | | | * + + * | | | * | | * | | | * + + * | | | * | | * | | | * + + * | | | * | | * | | | * +--------+--------+--------+--------+--------+--------+--------+--------+ * * * 32x32 塊 * 深度d=1 * split_flag=1時候劃分為4個16x16 * * +--------+--------+--------+--------+ * | | * | | | * | | * + | + * | | * | | | * | | * + -- -- -- -- + -- -- -- -- + * | | * | | | * | | * + | + * | | * | | | * | | * +--------+--------+--------+--------+ * * * 16x16 塊 * 深度d=2 * split_flag=1時候劃分為4個8x8 * * +--------+--------+ * | | * | | | * | | * + -- --+ -- -- + * | | * | | | * | | * +--------+--------+ * * * 8x8塊 * 深度d=3 * split_flag=1時候劃分為4個4x4 * * +----+----+ * | | | * + -- + -- + * | | | * +----+----+ * */ /* * 解析四叉樹結構,並且解碼 * * hls_coding_quadtree(HEVCContext *s, int x0, int y0, int log2_cb_size, int cb_depth)中: * s:HEVCContext上下文結構體 * x_ctb:CB位置的x座標 * y_ctb:CB位置的y座標 * log2_cb_size:CB大小取log2之後的值 * cb_depth:深度 * */ more_data = hls_coding_quadtree(s, x_ctb, y_ctb, s->sps->log2_ctb_size, 0); if (more_data < 0) { s->tab_slice_address[ctb_addr_rs] = -1; return more_data; } ctb_addr_ts++; //儲存解碼資訊以供下次使用 ff_hevc_save_states(s, ctb_addr_ts); //去塊效應濾波 ff_hevc_hls_filters(s, x_ctb, y_ctb, ctb_size); } if (x_ctb + ctb_size >= s->sps->width && y_ctb + ctb_size >= s->sps->height) ff_hevc_hls_filter(s, x_ctb, y_ctb, ctb_size); return ctb_addr_ts; }
從原始碼可以看出,hls_decode_entry()主要呼叫了2個函式進行解碼工作:
(1)呼叫hls_coding_quadtree()解碼CTU。其中包含了PU和TU的解碼。本文分析第一步的CTU解碼過程。
(2)呼叫ff_hevc_hls_filters()進行濾波。其中包含了去塊效應濾波和SAO濾波。
hls_coding_quadtree()
hls_coding_quadtree()用於解析CTU的四叉樹句法結構。該函式的定義如下所示。/*
* 解析四叉樹結構,並且解碼
* 注意該函式是遞迴呼叫
* 註釋和處理:雷霄驊
*
*
* s:HEVCContext上下文結構體
* x_ctb:CB位置的x座標
* y_ctb:CB位置的y座標
* log2_cb_size:CB大小取log2之後的值
* cb_depth:深度
*
*/
static int hls_coding_quadtree(HEVCContext *s, int x0, int y0,
int log2_cb_size, int cb_depth)
{
HEVCLocalContext *lc = s->HEVClc;
//CB的大小,split flag=0
//log2_cb_size為CB大小取log之後的結果
const int cb_size = 1 << log2_cb_size;
int ret;
int qp_block_mask = (1<<(s->sps->log2_ctb_size - s->pps->diff_cu_qp_delta_depth)) - 1;
int split_cu;
lc->ct_depth = cb_depth;
if (x0 + cb_size <= s->sps->width &&
y0 + cb_size <= s->sps->height &&
log2_cb_size > s->sps->log2_min_cb_size) {
split_cu = ff_hevc_split_coding_unit_flag_decode(s, cb_depth, x0, y0);
} else {
split_cu = (log2_cb_size > s->sps->log2_min_cb_size);
}
if (s->pps->cu_qp_delta_enabled_flag &&
log2_cb_size >= s->sps->log2_ctb_size - s->pps->diff_cu_qp_delta_depth) {
lc->tu.is_cu_qp_delta_coded = 0;
lc->tu.cu_qp_delta = 0;
}
if (s->sh.cu_chroma_qp_offset_enabled_flag &&
log2_cb_size >= s->sps->log2_ctb_size - s->pps->diff_cu_chroma_qp_offset_depth) {
lc->tu.is_cu_chroma_qp_offset_coded = 0;
}
if (split_cu) {
//如果CU還可以繼續劃分,則繼續解析劃分後的CU
//注意這裡是遞迴呼叫
//CB的大小,split flag=1
const int cb_size_split = cb_size >> 1;
/*
* (x0, y0) (x1, y0)
* +--------+--------+
* | |
* | | |
* | |
* + -- --+ -- -- +
* (x0, y1) (x1, y1) |
* | | |
* | |
* +--------+--------+
*
*/
const int x1 = x0 + cb_size_split;
const int y1 = y0 + cb_size_split;
int more_data = 0;
//注意:
//CU大小減半,log2_cb_size-1
//深度d加1,cb_depth+1
more_data = hls_coding_quadtree(s, x0, y0, log2_cb_size - 1, cb_depth + 1);
if (more_data < 0)
return more_data;
if (more_data && x1 < s->sps->width) {
more_data = hls_coding_quadtree(s, x1, y0, log2_cb_size - 1, cb_depth + 1);
if (more_data < 0)
return more_data;
}
if (more_data && y1 < s->sps->height) {
more_data = hls_coding_quadtree(s, x0, y1, log2_cb_size - 1, cb_depth + 1);
if (more_data < 0)
return more_data;
}
if (more_data && x1 < s->sps->width &&
y1 < s->sps->height) {
more_data = hls_coding_quadtree(s, x1, y1, log2_cb_size - 1, cb_depth + 1);
if (more_data < 0)
return more_data;
}
if(((x0 + (1<<log2_cb_size)) & qp_block_mask) == 0 &&
((y0 + (1<<log2_cb_size)) & qp_block_mask) == 0)
lc->qPy_pred = lc->qp_y;
if (more_data)
return ((x1 + cb_size_split) < s->sps->width ||
(y1 + cb_size_split) < s->sps->height);
else
return 0;
} else {
/*
* (x0, y0)
* +--------+--------+
* | |
* | |
* | |
* + +
* | |
* | |
* | |
* +--------+--------+
*
*/
//注意處理的是不可劃分的CU單元
//處理CU單元-真正的解碼
ret = hls_coding_unit(s, x0, y0, log2_cb_size);
if (ret < 0)
return ret;
if ((!((x0 + cb_size) %
(1 << (s->sps->log2_ctb_size))) ||
(x0 + cb_size >= s->sps->width)) &&
(!((y0 + cb_size) %
(1 << (s->sps->log2_ctb_size))) ||
(y0 + cb_size >= s->sps->height))) {
int end_of_slice_flag = ff_hevc_end_of_slice_flag_decode(s);
return !end_of_slice_flag;
} else {
return 1;
}
}
return 0;
}
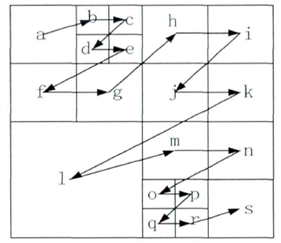
從原始碼可以看出,hls_coding_quadtree()首先呼叫ff_hevc_split_coding_unit_flag_decode()判斷當前CU是否還需要劃分。如果需要劃分的話,就會遞迴呼叫4次hls_coding_quadtree()分別對4個子塊繼續進行四叉樹解析;如果不需要劃分,就會呼叫hls_coding_unit()對CU進行解碼。總而言之,hls_coding_quadtree()會解析出來一個CTU中的所有CU,並且對每一個CU逐一呼叫hls_coding_unit()進行解碼。一個CTU中CU的解碼順序如下圖所示。圖中a, b, c …即代表了的先後順序。
hls_coding_unit()
hls_coding_unit()用於解碼一個CU。該函式的定義如下所示。//處理CU單元-真正的解碼
//註釋和處理:雷霄驊
static int hls_coding_unit(HEVCContext *s, int x0, int y0, int log2_cb_size)
{
//CB大小
int cb_size = 1 << log2_cb_size;
HEVCLocalContext *lc = s->HEVClc;
int log2_min_cb_size = s->sps->log2_min_cb_size;
int length = cb_size >> log2_min_cb_size;
int min_cb_width = s->sps->min_cb_width;
//以最小的CB為單位(例如4x4)的時候,當前CB的位置——x座標和y座標
int x_cb = x0 >> log2_min_cb_size;
int y_cb = y0 >> log2_min_cb_size;
int idx = log2_cb_size - 2;
int qp_block_mask = (1<<(s->sps->log2_ctb_size - s->pps->diff_cu_qp_delta_depth)) - 1;
int x, y, ret;
//設定CU的屬性值
lc->cu.x = x0;
lc->cu.y = y0;
lc->cu.pred_mode = MODE_INTRA;
lc->cu.part_mode = PART_2Nx2N;
lc->cu.intra_split_flag = 0;
SAMPLE_CTB(s->skip_flag, x_cb, y_cb) = 0;
for (x = 0; x < 4; x++)
lc->pu.intra_pred_mode[x] = 1;
if (s->pps->transquant_bypass_enable_flag) {
lc->cu.cu_transquant_bypass_flag = ff_hevc_cu_transquant_bypass_flag_decode(s);
if (lc->cu.cu_transquant_bypass_flag)
set_deblocking_bypass(s, x0, y0, log2_cb_size);
} else
lc->cu.cu_transquant_bypass_flag = 0;
if (s->sh.slice_type != I_SLICE) {
//Skip型別
uint8_t skip_flag = ff_hevc_skip_flag_decode(s, x0, y0, x_cb, y_cb);
//設定到skip_flag快取中
x = y_cb * min_cb_width + x_cb;
for (y = 0; y < length; y++) {
memset(&s->skip_flag[x], skip_flag, length);
x += min_cb_width;
}
lc->cu.pred_mode = skip_flag ? MODE_SKIP : MODE_INTER;
} else {
x = y_cb * min_cb_width + x_cb;
for (y = 0; y < length; y++) {
memset(&s->skip_flag[x], 0, length);
x += min_cb_width;
}
}
if (SAMPLE_CTB(s->skip_flag, x_cb, y_cb)) {
hls_prediction_unit(s, x0, y0, cb_size, cb_size, log2_cb_size, 0, idx);
intra_prediction_unit_default_value(s, x0, y0, log2_cb_size);
if (!s->sh.disable_deblocking_filter_flag)
ff_hevc_deblocking_boundary_strengths(s, x0, y0, log2_cb_size);
} else {
int pcm_flag = 0;
//讀取預測模式(非 I Slice)
if (s->sh.slice_type != I_SLICE)
lc->cu.pred_mode = ff_hevc_pred_mode_decode(s);
//不是幀內預測模式的時候
//或者已經是最小CB的時候
if (lc->cu.pred_mode != MODE_INTRA ||
log2_cb_size == s->sps->log2_min_cb_size) {
//讀取CU分割模式
lc->cu.part_mode = ff_hevc_part_mode_decode(s, log2_cb_size);
lc->cu.intra_split_flag = lc->cu.part_mode == PART_NxN &&
lc->cu.pred_mode == MODE_INTRA;
}
if (lc->cu.pred_mode == MODE_INTRA) {
//幀內預測模式
//PCM方式編碼,不常見
if (lc->cu.part_mode == PART_2Nx2N && s->sps->pcm_enabled_flag &&
log2_cb_size >= s->sps->pcm.log2_min_pcm_cb_size &&
log2_cb_size <= s->sps->pcm.log2_max_pcm_cb_size) {
pcm_flag = ff_hevc_pcm_flag_decode(s);
}
if (pcm_flag) {
intra_prediction_unit_default_value(s, x0, y0, log2_cb_size);
ret = hls_pcm_sample(s, x0, y0, log2_cb_size);
if (s->sps->pcm.loop_filter_disable_flag)
set_deblocking_bypass(s, x0, y0, log2_cb_size);
if (ret < 0)
return ret;
} else {
//幀內預測
intra_prediction_unit(s, x0, y0, log2_cb_size);
}
} else {
//幀間預測模式
intra_prediction_unit_default_value(s, x0, y0, log2_cb_size);
//幀間模式一共有8種劃分模式
switch (lc->cu.part_mode) {
case PART_2Nx2N:
/*
* PART_2Nx2N:
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*/
//處理PU單元-運動補償
hls_prediction_unit(s, x0, y0, cb_size, cb_size, log2_cb_size, 0, idx);
break;
case PART_2NxN:
/*
* PART_2NxN:
* +--------+--------+
* | |
* | |
* | |
* +--------+--------+
* | |
* | |
* | |
* +--------+--------+
*
*/
/*
* hls_prediction_unit()引數:
* x0 : PU左上角x座標
* y0 : PU左上角y座標
* nPbW : PU寬度
* nPbH : PU高度
* log2_cb_size : CB大小取log2()的值
* partIdx : PU的索引號-分成4個塊的時候取0-3,分成兩個塊的時候取0和1
*/
//上
hls_prediction_unit(s, x0, y0, cb_size, cb_size / 2, log2_cb_size, 0, idx);
//下
hls_prediction_unit(s, x0, y0 + cb_size / 2, cb_size, cb_size / 2, log2_cb_size, 1, idx);
break;
case PART_Nx2N:
/*
* PART_Nx2N:
* +--------+--------+
* | | |
* | | |
* | | |
* + + +
* | | |
* | | |
* | | |
* +--------+--------+
*
*/
//左
hls_prediction_unit(s, x0, y0, cb_size / 2, cb_size, log2_cb_size, 0, idx - 1);
//右
hls_prediction_unit(s, x0 + cb_size / 2, y0, cb_size / 2, cb_size, log2_cb_size, 1, idx - 1);
break;
case PART_2NxnU:
/*
* PART_2NxnU (Upper) :
* +--------+--------+
* | |
* +--------+--------+
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*
*/
//上
hls_prediction_unit(s, x0, y0, cb_size, cb_size / 4, log2_cb_size, 0, idx);
//下
hls_prediction_unit(s, x0, y0 + cb_size / 4, cb_size, cb_size * 3 / 4, log2_cb_size, 1, idx);
break;
case PART_2NxnD:
/*
* PART_2NxnD (Down) :
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* +--------+--------+
* | |
* +--------+--------+
*
*/
//上
hls_prediction_unit(s, x0, y0, cb_size, cb_size * 3 / 4, log2_cb_size, 0, idx);
//下
hls_prediction_unit(s, x0, y0 + cb_size * 3 / 4, cb_size, cb_size / 4, log2_cb_size, 1, idx);
break;
case PART_nLx2N:
/*
* PART_nLx2N (Left):
* +----+---+--------+
* | | |
* | | |
* | | |
* + + + +
* | | |
* | | |
* | | |
* +----+---+--------+
*
*/
//左
hls_prediction_unit(s, x0, y0, cb_size / 4, cb_size, log2_cb_size, 0, idx - 2);
//右
hls_prediction_unit(s, x0 + cb_size / 4, y0, cb_size * 3 / 4, cb_size, log2_cb_size, 1, idx - 2);
break;
case PART_nRx2N:
/*
* PART_nRx2N (Right):
* +--------+---+----+
* | | |
* | | |
* | | |
* + + + +
* | | |
* | | |
* | | |
* +--------+---+----+
*
*/
//左
hls_prediction_unit(s, x0, y0, cb_size * 3 / 4, cb_size, log2_cb_size, 0, idx - 2);
//右
hls_prediction_unit(s, x0 + cb_size * 3 / 4, y0, cb_size / 4, cb_size, log2_cb_size, 1, idx - 2);
break;
case PART_NxN:
/*
* PART_NxN:
* +--------+--------+
* | | |
* | | |
* | | |
* +--------+--------+
* | | |
* | | |
* | | |
* +--------+--------+
*
*/
hls_prediction_unit(s, x0, y0, cb_size / 2, cb_size / 2, log2_cb_size, 0, idx - 1);
hls_prediction_unit(s, x0 + cb_size / 2, y0, cb_size / 2, cb_size / 2, log2_cb_size, 1, idx - 1);
hls_prediction_unit(s, x0, y0 + cb_size / 2, cb_size / 2, cb_size / 2, log2_cb_size, 2, idx - 1);
hls_prediction_unit(s, x0 + cb_size / 2, y0 + cb_size / 2, cb_size / 2, cb_size / 2, log2_cb_size, 3, idx - 1);
break;
}
}
if (!pcm_flag) {
int rqt_root_cbf = 1;
if (lc->cu.pred_mode != MODE_INTRA &&
!(lc->cu.part_mode == PART_2Nx2N && lc->pu.merge_flag)) {
rqt_root_cbf = ff_hevc_no_residual_syntax_flag_decode(s);
}
if (rqt_root_cbf) {
const static int cbf[2] = { 0 };
lc->cu.max_trafo_depth = lc->cu.pred_mode == MODE_INTRA ?
s->sps->max_transform_hierarchy_depth_intra + lc->cu.intra_split_flag :
s->sps->max_transform_hierarchy_depth_inter;
//處理TU四叉樹
ret = hls_transform_tree(s, x0, y0, x0, y0, x0, y0,
log2_cb_size,
log2_cb_size, 0, 0, cbf, cbf);
if (ret < 0)
return ret;
} else {
if (!s->sh.disable_deblocking_filter_flag)
ff_hevc_deblocking_boundary_strengths(s, x0, y0, log2_cb_size);
}
}
}
if (s->pps->cu_qp_delta_enabled_flag && lc->tu.is_cu_qp_delta_coded == 0)
ff_hevc_set_qPy(s, x0, y0, log2_cb_size);
x = y_cb * min_cb_width + x_cb;
for (y = 0; y < length; y++) {
memset(&s->qp_y_tab[x], lc->qp_y, length);
x += min_cb_width;
}
if(((x0 + (1<<log2_cb_size)) & qp_block_mask) == 0 &&
((y0 + (1<<log2_cb_size)) & qp_block_mask) == 0) {
lc->qPy_pred = lc->qp_y;
}
set_ct_depth(s, x0, y0, log2_cb_size, lc->ct_depth);
return 0;
}
從原始碼可以看出,hls_coding_unit()主要進行了兩個方面的處理:
(1)呼叫hls_prediction_unit()處理PU。本文分析第二個函式hls_transform_tree()中相關的程式碼。
(2)呼叫hls_transform_tree()處理TU樹。
hls_transform_tree()
hls_transform_tree()用於解析TU四叉樹句法。該函式的定義如下所示。//處理TU四叉樹
static int hls_transform_tree(HEVCContext *s, int x0, int y0,
int xBase, int yBase, int cb_xBase, int cb_yBase,
int log2_cb_size, int log2_trafo_size,
int trafo_depth, int blk_idx,
const int *base_cbf_cb, const int *base_cbf_cr)
{
HEVCLocalContext *lc = s->HEVClc;
uint8_t split_transform_flag;
int cbf_cb[2];
int cbf_cr[2];
int ret;
cbf_cb[0] = base_cbf_cb[0];
cbf_cb[1] = base_cbf_cb[1];
cbf_cr[0] = base_cbf_cr[0];
cbf_cr[1] = base_cbf_cr[1];
if (lc->cu.intra_split_flag) {
if (trafo_depth == 1) {
lc->tu.intra_pred_mode = lc->pu.intra_pred_mode[blk_idx];
if (s->sps->chroma_format_idc == 3) {
lc->tu.intra_pred_mode_c = lc->pu.intra_pred_mode_c[blk_idx];
lc->tu.chroma_mode_c = lc->pu.chroma_mode_c[blk_idx];
} else {
lc->tu.intra_pred_mode_c = lc->pu.intra_pred_mode_c[0];
lc->tu.chroma_mode_c = lc->pu.chroma_mode_c[0];
}
}
} else {
lc->tu.intra_pred_mode = lc->pu.intra_pred_mode[0];
lc->tu.intra_pred_mode_c = lc->pu.intra_pred_mode_c[0];
lc->tu.chroma_mode_c = lc->pu.chroma_mode_c[0];
}
if (log2_trafo_size <= s->sps->log2_max_trafo_size &&
log2_trafo_size > s->sps->log2_min_tb_size &&
trafo_depth < lc->cu.max_trafo_depth &&
!(lc->cu.intra_split_flag && trafo_depth == 0)) {
split_transform_flag = ff_hevc_split_transform_flag_decode(s, log2_trafo_size);
} else {
int inter_split = s->sps->max_transform_hierarchy_depth_inter == 0 &&
lc->cu.pred_mode == MODE_INTER &&
lc->cu.part_mode != PART_2Nx2N &&
trafo_depth == 0;
//split_transform_flag標記當前TU是否要進行四叉樹劃分
//為1則需要劃分為4個大小相等的,為0則不再劃分
split_transform_flag = log2_trafo_size > s->sps->log2_max_trafo_size ||
(lc->cu.intra_split_flag && trafo_depth == 0) ||
inter_split;
}
if (log2_trafo_size > 2 || s->sps->chroma_format_idc == 3) {
if (trafo_depth == 0 || cbf_cb[0]) {
cbf_cb[0] = ff_hevc_cbf_cb_cr_decode(s, trafo_depth);
if (s->sps->chroma_format_idc == 2 && (!split_transform_flag || log2_trafo_size == 3)) {
cbf_cb[1] = ff_hevc_cbf_cb_cr_decode(s, trafo_depth);
}
}
if (trafo_depth == 0 || cbf_cr[0]) {
cbf_cr[0] = ff_hevc_cbf_cb_cr_decode(s, trafo_depth);
if (s->sps->chroma_format_idc == 2 && (!split_transform_flag || log2_trafo_size == 3)) {
cbf_cr[1] = ff_hevc_cbf_cb_cr_decode(s, trafo_depth);
}
}
}
//如果當前TU要進行四叉樹劃分
if (split_transform_flag) {
const int trafo_size_split = 1 << (log2_trafo_size - 1);
const int x1 = x0 + trafo_size_split;
const int y1 = y0 + trafo_size_split;
#define SUBDIVIDE(x, y, idx) \
do { \
ret = hls_transform_tree(s, x, y, x0, y0, cb_xBase, cb_yBase, log2_cb_size, \
log2_trafo_size - 1, trafo_depth + 1, idx, \
cbf_cb, cbf_cr); \
if (ret < 0) \
return ret; \
} while (0)
//遞迴呼叫
SUBDIVIDE(x0, y0, 0);
SUBDIVIDE(x1, y0, 1);
SUBDIVIDE(x0, y1, 2);
SUBDIVIDE(x1, y1, 3);
#undef SUBDIVIDE
} else {
int min_tu_size = 1 << s->sps->log2_min_tb_size;
int log2_min_tu_size = s->sps->log2_min_tb_size;
int min_tu_width = s->sps->min_tb_width;
int cbf_luma = 1;
if (lc->cu.pred_mode == MODE_INTRA || trafo_depth != 0 ||
cbf_cb[0] || cbf_cr[0] ||
(s->sps->chroma_format_idc == 2 && (cbf_cb[1] || cbf_cr[1]))) {
cbf_luma = ff_hevc_cbf_luma_decode(s, trafo_depth);
}
//處理TU-幀內預測、DCT反變換
ret = hls_transform_unit(s, x0, y0, xBase, yBase, cb_xBase, cb_yBase,
log2_cb_size, log2_trafo_size,
blk_idx, cbf_luma, cbf_cb, cbf_cr);
if (ret < 0)
return ret;
// TODO: store cbf_luma somewhere else
if (cbf_luma) {
int i, j;
for (i = 0; i < (1 << log2_trafo_size); i += min_tu_size)
for (j = 0; j < (1 << log2_trafo_size); j += min_tu_size) {
int x_tu = (x0 + j) >> log2_min_tu_size;
int y_tu = (y0 + i) >> log2_min_tu_size;
s->cbf_luma[y_tu * min_tu_width + x_tu] = 1;
}
}
if (!s->sh.disable_deblocking_filter_flag) {
ff_hevc_deblocking_boundary_strengths(s, x0, y0, log2_trafo_size);
if (s->pps->transquant_bypass_enable_flag &&
lc->cu.cu_transquant_bypass_flag)
set_deblocking_bypass(s, x0, y0, log2_trafo_size);
}
}
return 0;
}
從原始碼可以看出,hls_transform_tree()首先呼叫ff_hevc_split_transform_flag_decode()判斷當前TU是否還需要劃分。如果需要劃分的話,就會遞迴呼叫4次hls_transform_tree()分別對4個子塊繼續進行四叉樹解析;如果不需要劃分,就會呼叫hls_transform_unit()對TU進行解碼。總而言之,hls_transform_tree()會解析出來一個TU樹中的所有TU,並且對每一個TU逐一呼叫hls_transform_unit()進行解碼。
hls_transform_unit()
hls_transform_unit()用於解碼一個TU,該函式的定義如下所示。//處理TU-幀內預測、DCT反變換
static int hls_transform_unit(HEVCContext *s, int x0, int y0,
int xBase, int yBase, int cb_xBase, int cb_yBase,
int log2_cb_size, int log2_trafo_size,
int blk_idx, int cbf_luma, int *cbf_cb, int *cbf_cr)
{
HEVCLocalContext *lc = s->HEVClc;
const int log2_trafo_size_c = log2_trafo_size - s->sps->hshift[1];
int i;
if (lc->cu.pred_mode == MODE_INTRA) {
int trafo_size = 1 << log2_trafo_size;
ff_hevc_set_neighbour_available(s, x0, y0, trafo_size, trafo_size);
//注意:幀內預測也是在這裡完成
//幀內預測
//log2_trafo_size為當前TU大小取log2()之後的值
s->hpc.intra_pred[log2_trafo_size - 2](s, x0, y0, 0);
}
if (cbf_luma || cbf_cb[0] || cbf_cr[0] ||
(s->sps->chroma_format_idc == 2 && (cbf_cb[1] || cbf_cr[1]))) {
int scan_idx = SCAN_DIAG;
int scan_idx_c = SCAN_DIAG;
int cbf_chroma = cbf_cb[0] || cbf_cr[0] ||
(s->sps->chroma_format_idc == 2 &&
(cbf_cb[1] || cbf_cr[1]));
if (s->pps->cu_qp_delta_enabled_flag && !lc->tu.is_cu_qp_delta_coded) {
lc->tu.cu_qp_delta = ff_hevc_cu_qp_delta_abs(s);
if (lc->tu.cu_qp_delta != 0)
if (ff_hevc_cu_qp_delta_sign_flag(s) == 1)
lc->tu.cu_qp_delta = -lc->tu.cu_qp_delta;
lc->tu.is_cu_qp_delta_coded = 1;
if (lc->tu.cu_qp_delta < -(26 + s->sps->qp_bd_offset / 2) ||
lc->tu.cu_qp_delta > (25 + s->sps->qp_bd_offset / 2)) {
av_log(s->avctx, AV_LOG_ERROR,
"The cu_qp_delta %d is outside the valid range "
"[%d, %d].\n",
lc->tu.cu_qp_delta,
-(26 + s->sps->qp_bd_offset / 2),
(25 + s->sps->qp_bd_offset / 2));
return AVERROR_INVALIDDATA;
}
ff_hevc_set_qPy(s, cb_xBase, cb_yBase, log2_cb_size);
}
if (s->sh.cu_chroma_qp_offset_enabled_flag && cbf_chroma &&
!lc->cu.cu_transquant_bypass_flag && !lc->tu.is_cu_chroma_qp_offset_coded) {
int cu_chroma_qp_offset_flag = ff_hevc_cu_chroma_qp_offset_flag(s);
if (cu_chroma_qp_offset_flag) {
int cu_chroma_qp_offset_idx = 0;
if (s->pps->chroma_qp_offset_list_len_minus1 > 0) {
cu_chroma_qp_offset_idx = ff_hevc_cu_chroma_qp_offset_idx(s);
av_log(s->avctx, AV_LOG_ERROR,
"cu_chroma_qp_offset_idx not yet tested.\n");
}
lc->tu.cu_qp_offset_cb = s->pps->cb_qp_offset_list[cu_chroma_qp_offset_idx];
lc->tu.cu_qp_offset_cr = s->pps->cr_qp_offset_list[cu_chroma_qp_offset_idx];
} else {
lc->tu.cu_qp_offset_cb = 0;
lc->tu.cu_qp_offset_cr = 0;
}
lc->tu.is_cu_chroma_qp_offset_coded = 1;
}
if (lc->cu.pred_mode == MODE_INTRA && log2_trafo_size < 4) {
if (lc->tu.intra_pred_mode >= 6 &&
lc->tu.intra_pred_mode <= 14) {
scan_idx = SCAN_VERT;
} else if (lc->tu.intra_pred_mode >= 22 &&
lc->tu.intra_pred_mode <= 30) {
scan_idx = SCAN_HORIZ;
}
if (lc->tu.intra_pred_mode_c >= 6 &&
lc->tu.intra_pred_mode_c <= 14) {
scan_idx_c = SCAN_VERT;
} else if (lc->tu.intra_pred_mode_c >= 22 &&
lc->tu.intra_pred_mode_c <= 30) {
scan_idx_c = SCAN_HORIZ;
}
}
lc->tu.cross_pf = 0;
//讀取殘差資料,進行反量化,DCT反變換
//亮度Y
if (cbf_luma)
ff_hevc_hls_residual_coding(s, x0, y0, log2_trafo_size, scan_idx, 0);//最後1個引數為顏色分量號
if (log2_trafo_size > 2 || s->sps->chroma_format_idc == 3) {
int trafo_size_h = 1 << (log2_trafo_size_c + s->sps->hshift[1]);
int trafo_size_v = 1 << (log2_trafo_size_c + s->sps->vshift[1]);
lc->tu.cross_pf = (s->pps->cross_component_prediction_enabled_flag && cbf_luma &&
(lc->cu.pred_mode == MODE_INTER ||
(lc->tu.chroma_mode_c == 4)));
if (lc->tu.cross_pf) {
hls_cross_component_pred(s, 0);
}
//色度U
for (i = 0; i < (s->sps->chroma_format_idc == 2 ? 2 : 1); i++) {
if (lc->cu.pred_mode == MODE_INTRA) {
ff_hevc_set_neighbour_available(s, x0, y0 + (i << log2_trafo_size_c), trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0 + (i << log2_trafo_size_c), 1);
}
if (cbf_cb[i])
ff_hevc_hls_residual_coding(s, x0, y0 + (i << log2_trafo_size_c),
log2_trafo_size_c, scan_idx_c, 1);//最後1個引數為顏色分量號
else
if (lc->tu.cross_pf) {
ptrdiff_t stride = s->frame->linesize[1];
int hshift = s->sps->hshift[1];
int vshift = s->sps->vshift[1];
int16_t *coeffs_y = (int16_t*)lc->edge_emu_buffer;
int16_t *coeffs = (int16_t*)lc->edge_emu_buffer2;
int size = 1 << log2_trafo_size_c;
uint8_t *dst = &s->frame->data[1][(y0 >> vshift) * stride +
((x0 >> hshift) << s->sps->pixel_shift)];
for (i = 0; i < (size * size); i++) {
coeffs[i] = ((lc->tu.res_scale_val * coeffs_y[i]) >> 3);
}
//疊加殘差資料
s->hevcdsp.transform_add[log2_trafo_size_c-2](dst, coeffs, stride);
}
}
if (lc->tu.cross_pf) {
hls_cross_component_pred(s, 1);
}
//色度V
for (i = 0; i < (s->sps->chroma_format_idc == 2 ? 2 : 1); i++) {
if (lc->cu.pred_mode == MODE_INTRA) {
ff_hevc_set_neighbour_available(s, x0, y0 + (i << log2_trafo_size_c), trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0 + (i << log2_trafo_size_c), 2);
}
//色度Cr
if (cbf_cr[i])
ff_hevc_hls_residual_coding(s, x0, y0 + (i << log2_trafo_size_c),
log2_trafo_size_c, scan_idx_c, 2);
else
if (lc->tu.cross_pf) {
ptrdiff_t stride = s->frame->linesize[2];
int hshift = s->sps->hshift[2];
int vshift = s->sps->vshift[2];
int16_t *coeffs_y = (int16_t*)lc->edge_emu_buffer;
int16_t *coeffs = (int16_t*)lc->edge_emu_buffer2;
int size = 1 << log2_trafo_size_c;
uint8_t *dst = &s->frame->data[2][(y0 >> vshift) * stride +
((x0 >> hshift) << s->sps->pixel_shift)];
for (i = 0; i < (size * size); i++) {
coeffs[i] = ((lc->tu.res_scale_val * coeffs_y[i]) >> 3);
}
s->hevcdsp.transform_add[log2_trafo_size_c-2](dst, coeffs, stride);
}
}
} else if (blk_idx == 3) {
int trafo_size_h = 1 << (log2_trafo_size + 1);
int trafo_size_v = 1 << (log2_trafo_size + s->sps->vshift[1]);
for (i = 0; i < (s->sps->chroma_format_idc == 2 ? 2 : 1); i++) {
if (lc->cu.pred_mode == MODE_INTRA) {
ff_hevc_set_neighbour_available(s, xBase, yBase + (i << log2_trafo_size),
trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase + (i << log2_trafo_size), 1);
}
if (cbf_cb[i])
ff_hevc_hls_residual_coding(s, xBase, yBase + (i << log2_trafo_size),
log2_trafo_size, scan_idx_c, 1);
}
for (i = 0; i < (s->sps->chroma_format_idc == 2 ? 2 : 1); i++) {
if (lc->cu.pred_mode == MODE_INTRA) {
ff_hevc_set_neighbour_available(s, xBase, yBase + (i << log2_trafo_size),
trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase + (i << log2_trafo_size), 2);
}
if (cbf_cr[i])
ff_hevc_hls_residual_coding(s, xBase, yBase + (i << log2_trafo_size),
log2_trafo_size, scan_idx_c, 2);
}
}
} else if (lc->cu.pred_mode == MODE_INTRA) {
if (log2_trafo_size > 2 || s->sps->chroma_format_idc == 3) {
int trafo_size_h = 1 << (log2_trafo_size_c + s->sps->hshift[1]);
int trafo_size_v = 1 << (log2_trafo_size_c + s->sps->vshift[1]);
ff_hevc_set_neighbour_available(s, x0, y0, trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0, 1);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0, 2);
if (s->sps->chroma_format_idc == 2) {
ff_hevc_set_neighbour_available(s, x0, y0 + (1 << log2_trafo_size_c),
trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0 + (1 << log2_trafo_size_c), 1);
s->hpc.intra_pred[log2_trafo_size_c - 2](s, x0, y0 + (1 << log2_trafo_size_c), 2);
}
} else if (blk_idx == 3) {
int trafo_size_h = 1 << (log2_trafo_size + 1);
int trafo_size_v = 1 << (log2_trafo_size + s->sps->vshift[1]);
ff_hevc_set_neighbour_available(s, xBase, yBase,
trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase, 1);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase, 2);
if (s->sps->chroma_format_idc == 2) {
ff_hevc_set_neighbour_available(s, xBase, yBase + (1 << (log2_trafo_size)),
trafo_size_h, trafo_size_v);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase + (1 << (log2_trafo_size)), 1);
s->hpc.intra_pred[log2_trafo_size - 2](s, xBase, yBase + (1 << (log2_trafo_size)), 2);
}
}
}
return 0;
}
從原始碼可以看出,如果是幀內CU的話,hls_transform_unit()會呼叫HEVCPredContext的intra_pred[]()彙編函式進行幀內預測;然後不論幀內預測還是幀間CU都會呼叫ff_hevc_hls_residual_coding()解碼殘差資料,併疊加在預測資料上。
ff_hevc_hls_residual_coding()
ff_hevc_hls_residual_coding()用於讀取殘差資料並進行DCT反變換。該函式的定義如下所示。//讀取殘差資料,DCT反變換
void ff_hevc_hls_residual_coding(HEVCContext *s, int x0, int y0,
int log2_trafo_size, enum ScanType scan_idx,
int c_idx)
{
#define GET_COORD(offset, n) \
do { \
x_c = (x_cg << 2) + scan_x_off[n]; \
y_c = (y_cg << 2) + scan_y_off[n]; \
} while (0)
HEVCLocalContext *lc = s->HEVClc;
int transform_skip_flag = 0;
int last_significant_coeff_x, last_significant_coeff_y;
int last_scan_pos;
int n_end;
int num_coeff = 0;
int greater1_ctx = 1;
int num_last_subset;
int x_cg_last_sig, y_cg_last_sig;
const uint8_t *scan_x_cg, *scan_y_cg, *scan_x_off, *scan_y_off;
ptrdiff_t stride = s->frame->linesize[c_idx];
int hshift = s->sps->hshift[c_idx];
int vshift = s->sps->vshift[c_idx];
uint8_t *dst = &s->frame->data[c_idx][(y0 >> vshift) * stride +
((x0 >> hshift) << s->sps->pixel_shift)];
int16_t *coeffs = (int16_t*)(c_idx ? lc->edge_emu_buffer2 : lc->edge_emu_buffer);
uint8_t significant_coeff_group_flag[8][8] = {{0}};
int explicit_rdpcm_flag = 0;
int explicit_rdpcm_dir_flag;
int trafo_size = 1 << log2_trafo_size;
int i;
int qp,shift,add,scale,scale_m;
const uint8_t level_scale[] = { 40, 45, 51, 57, 64, 72 };
const uint8_t *scale_matrix = NULL;
uint8_t dc_scale;
int pred_mode_intra = (c_idx == 0) ? lc->tu.intra_pred_mode :
lc->tu.intra_pred_mode_c;
memset(coeffs, 0, trafo_size * trafo_size * sizeof(int16_t));
// Derive QP for dequant
if (!lc->cu.cu_transquant_bypass_flag) {
static const int qp_c[] = { 29, 30, 31, 32, 33, 33, 34, 34, 35, 35, 36, 36, 37, 37 };
static const uint8_t rem6[51 + 4 * 6 + 1] = {
0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2,
3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5,
0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2, 3, 4, 5, 0, 1, 2, 3,
4, 5, 0, 1, 2, 3, 4, 5, 0, 1
};
static const uint8_t div6[51 + 4 * 6 + 1] = {
0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 3, 3, 3,
3, 3, 3, 4, 4, 4, 4, 4, 4, 5, 5, 5, 5, 5, 5, 6, 6, 6, 6, 6, 6,
7, 7, 7, 7, 7, 7, 8, 8, 8, 8, 8, 8, 9, 9, 9, 9, 9, 9, 10, 10, 10, 10,
10, 10, 11, 11, 11, 11, 11, 11, 12, 12
};
int qp_y = lc->qp_y;
if (s->pps->transform_skip_enabled_flag &&
log2_trafo_size <= s->pps->log2_max_transform_skip_block_size) {
transform_skip_flag = ff_hevc_transform_skip_flag_decode(s, c_idx);
}
if (c_idx == 0) {
qp = qp_y + s->sps->qp_bd_offset;
} else {
int qp_i, offset;
if (c_idx == 1)
offset = s->pps->cb_qp_offset + s->sh.slice_cb_qp_offset +
lc->tu.cu_qp_offset_cb;
else
offset = s->pps->cr_qp_offset + s->sh.slice_cr_qp_offset +
lc->tu.cu_qp_offset_cr;
qp_i = av_clip(qp_y + offset, - s->sps->qp_bd_offset, 57);
if (s->sps->chroma_format_idc == 1) {
if (qp_i < 30)
qp = qp_i;
else if (qp_i > 43)
qp = qp_i - 6;
else
qp = qp_c[qp_i - 30];
} else {
if (qp_i > 51)
qp = 51;
else
qp = qp_i;
}
qp += s->sps->qp_bd_offset;
}
shift = s->sps->bit_depth + log2_trafo_size - 5;
add = 1 << (shift-1);
scale = level_scale[rem6[qp]] << (div6[qp]);
scale_m = 16; // default when no custom scaling lists.
dc_scale = 16;
if (s->sps->scaling_list_enable_flag && !(transform_skip_flag && log2_trafo_size > 2)) {
const ScalingList *sl = s->pps->scaling_list_data_present_flag ?
&s->pps->scaling_list : &s->sps->scaling_list;
int matrix_id = lc->cu.pred_mode != MODE_INTRA;
matrix_id = 3 * matrix_id + c_idx;
scale_matrix = sl->sl[log2_trafo_size - 2][matrix_id];
if (log2_trafo_size >= 4)
dc_scale = sl->sl_dc[log2_trafo_size - 4][matrix_id];
}
} else {
shift = 0;
add = 0;
scale = 0;
dc_scale = 0;
}
if (lc->cu.pred_mode == MODE_INTER && s->sps->explicit_rdpcm_enabled_flag &&
(transform_skip_flag || lc->cu.cu_transquant_bypass_flag)) {
explicit_rdpcm_flag = explicit_rdpcm_flag_decode(s, c_idx);
if (explicit_rdpcm_flag) {
explicit_rdpcm_dir_flag = explicit_rdpcm_dir_flag_decode(s, c_idx);
}
}
last_significant_coeff_xy_prefix_decode(s, c_idx, log2_trafo_size,
&last_significant_coeff_x, &last_significant_coeff_y);
if (last_significant_coeff_x > 3) {
int suffix = last_significant_coeff_suffix_decode(s, last_significant_coeff_x);
last_significant_coeff_x = (1 << ((last_significant_coeff_x >> 1) - 1)) *
(2 + (last_significant_coeff_x & 1)) +
suffix;
}
if (last_significant_coeff_y > 3) {
int suffix = last_significant_coeff_suffix_decode(s, last_significant_coeff_y);
last_significant_coeff_y = (1 << ((last_significant_coeff_y >> 1) - 1)) *
(2 + (last_significant_coeff_y & 1)) +
suffix;
}
if (scan_idx == SCAN_VERT)
FFSWAP(int, last_significant_coeff_x, last_significant_coeff_y);
x_cg_last_sig = last_significant_coeff_x >> 2;
y_cg_last_sig = last_significant_coeff_y >> 2;
switch (scan_idx) {
case SCAN_DIAG: {
int last_x_c = last_significant_coeff_x & 3;
int last_y_c = last_significant_coeff_y & 3;
scan_x_off = ff_hevc_diag_scan4x4_x;
scan_y_off = ff_hevc_diag_scan4x4_y;
num_coeff = diag_scan4x4_inv[last_y_c][last_x_c];
if (trafo_size == 4) {
scan_x_cg = scan_1x1;
scan_y_cg = scan_1x1;
} else if (trafo_size == 8) {
num_coeff += diag_scan2x2_inv[y_cg_last_sig][x_cg_last_sig] << 4;
scan_x_cg = diag_scan2x2_x;
scan_y_cg = diag_scan2x2_y;
} else if (trafo_size == 16) {
num_coeff += diag_scan4x4_inv[y_cg_last_sig][x_cg_last_sig] << 4;
scan_x_cg = ff_hevc_diag_scan4x4_x;
scan_y_cg = ff_hevc_diag_scan4x4_y;
} else { // trafo_size == 32
num_coeff += diag_scan8x8_inv[y_cg_last_sig][x_cg_last_sig] << 4;
scan_x_cg = ff_hevc_diag_scan8x8_x;
scan_y_cg = ff_hevc_diag_scan8x8_y;
}
break;
}
case SCAN_HORIZ:
scan_x_cg = horiz_scan2x2_x;
scan_y_cg = horiz_scan2x2_y;
scan_x_off = horiz_scan4x4_x;
scan_y_off = horiz_scan4x4_y;
num_coeff = horiz_scan8x8_inv[last_significant_coeff_y][last_significant_coeff_x];
break;
default: //SCAN_VERT
scan_x_cg = horiz_scan2x2_y;
scan_y_cg = horiz_scan2x2_x;
scan_x_off = horiz_scan4x4_y;
scan_y_off = horiz_scan4x4_x;
num_coeff = horiz_scan8x8_inv[last_significant_coeff_x][last_significant_coeff_y];
break;
}
num_coeff++;
num_last_subset = (num_coeff - 1) >> 4;
for (i = num_last_subset; i >= 0; i--) {
int n, m;
int x_cg, y_cg, x_c, y_c, pos;
int implicit_non_zero_coeff = 0;
int64_t trans_coeff_level;
int prev_sig = 0;
int offset = i << 4;
int rice_init = 0;
uint8_t significant_coeff_flag_idx[16];
uint8_t nb_significant_coeff_flag = 0;
x_cg = scan_x_cg[i];
y_cg = scan_y_cg[i];
if ((i < num_last_subset) && (i > 0)) {
int ctx_cg = 0;
if (x_cg < (1 << (log2_trafo_size - 2)) - 1)
ctx_cg += significant_coeff_group_flag[x_cg + 1][y_cg];
if (y_cg < (1 << (log2_trafo_size - 2)) - 1)
ctx_cg += significant_coeff_group_flag[x_cg][y_cg + 1];
significant_coeff_group_flag[x_cg][y_cg] =
significant_coeff_group_flag_decode(s, c_idx, ctx_cg);
implicit_non_zero_coeff = 1;
} else {
significant_coeff_group_flag[x_cg][y_cg] =
((x_cg == x_cg_last_sig && y_cg == y_cg_last_sig) ||
(x_cg == 0 && y_cg == 0));
}
last_scan_pos = num_coeff - offset - 1;
if (i == num_last_subset) {
n_end = last_scan_pos - 1;
significant_coeff_flag_idx[0] = last_scan_pos;
nb_significant_coeff_flag = 1;
} else {
n_end = 15;
}
if (x_cg < ((1 << log2_trafo_size) - 1) >> 2)
prev_sig = !!significant_coeff_group_flag[x_cg + 1][y_cg];
if (y_cg < ((1 << log2_trafo_size) - 1) >> 2)
prev_sig += (!!significant_coeff_group_flag[x_cg][y_cg + 1] << 1);
if (significant_coeff_group_flag[x_cg][y_cg] && n_end >= 0) {
static const uint8_t ctx_idx_map[] = {
0, 1, 4, 5, 2, 3, 4, 5, 6, 6, 8, 8, 7, 7, 8, 8, // log2_trafo_size == 2
1, 1, 1, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, // prev_sig == 0
2, 2, 2, 2, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, // prev_sig == 1
2, 1, 0, 0, 2, 1, 0, 0, 2, 1, 0, 0, 2, 1, 0, 0, // prev_sig == 2
2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 // default
};
const uint8_t *ctx_idx_map_p;
int scf_offset = 0;
if (s->sps->transform_skip_context_enabled_flag &&
(transform_skip_flag || lc->cu.cu_transquant_bypass_flag)) {
ctx_idx_map_p = (uint8_t*) &ctx_idx_map[4 * 16];
if (c_idx == 0) {
scf_offset = 40;
} else {
scf_offset = 14 + 27;
}
} else {
if (c_idx != 0)
scf_offset = 27;
if (log2_trafo_size == 2) {
ctx_idx_map_p = (uint8_t*) &ctx_idx_map[0];
} else {
ctx_idx_map_p = (uint8_t*) &ctx_idx_map[(prev_sig + 1) << 4];
if (c_idx == 0) {
if ((x_cg > 0 || y_cg > 0))
scf_offset += 3;
if (log2_trafo_size == 3) {
scf_offset += (scan_idx == SCAN_DIAG) ? 9 : 15;
} else {
scf_offset += 21;
}
} else {
if (log2_trafo_size == 3)
scf_offset += 9;
else
scf_offset += 12;
}
}
}
for (n = n_end; n > 0; n--) {
x_c = scan_x_off[n];
y_c = scan_y_off[n];
if (significant_coeff_flag_decode(s, x_c, y_c, scf_offset, ctx_idx_map_p)) {
significant_coeff_flag_idx[nb_significant_coeff_flag] = n;
nb_significant_coeff_flag++;
implicit_non_zero_coeff = 0;
}
}
if (implicit_non_zero_coeff == 0) {
if (s->sps->transform_skip_context_enabled_flag &&
(transform_skip_flag || lc->cu.cu_transquant_bypass_flag)) {
if (c_idx == 0) {
scf_offset = 42;
} else {
scf_offset = 16 + 27;
}
} else {
if (i == 0) {
if (c_idx == 0)
scf_offset = 0;
else
scf_offset = 27;
} else {
scf_offset = 2 + scf_offset;
}
}
if (significant_coeff_flag_decode_0(s, c_idx, scf_offset) == 1) {
significant_coeff_flag_idx[nb_significant_coeff_flag] = 0;
nb_significant_coeff_flag++;
}
} else {
significant_coeff_flag_idx[nb_significant_coeff_flag] = 0;
nb_significant_coeff_flag++;
}
}
n_end = nb_significant_coeff_flag;
if (n_end) {
int first_nz_pos_in_cg;
int last_nz_pos_in_cg;
int c_rice_param = 0;
int first_greater1_coeff_idx = -1;
uint8_t coeff_abs_level_greater1_flag[8];
uint16_t coeff_sign_flag;
int sum_abs = 0;
int sign_hidden;
int sb_type;
// initialize first elem of coeff_bas_level_greater1_flag
int ctx_set = (i > 0 && c_idx == 0) ? 2 : 0;
if (s->sps->persistent_rice_adaptation_enabled_flag) {
if (!transform_skip_flag && !lc->cu.cu_transquant_bypass_flag)
sb_type = 2 * (c_idx == 0 ? 1 : 0);
else
sb_type = 2 * (c_idx == 0 ? 1 : 0) + 1;
c_rice_param = lc->stat_coeff[sb_type] / 4;
}
if (!(i == num_last_subset) && greater1_ctx == 0)
ctx_set++;
greater1_ctx = 1;
last_nz_pos_in_cg = significant_coeff_flag_idx[0];
for (m = 0; m < (n_end > 8 ? 8 : n_end); m++) {
int inc = (ctx_set << 2) + greater1_ctx;
coeff_abs_level_greater1_flag[m] =
coeff_abs_level_greater1_flag_decode(s, c_idx, inc);
if (coeff_abs_level_greater1_flag[m]) {
greater1_ctx = 0;
if (first_greater1_coeff_idx == -1)
first_greater1_coeff_idx = m;
} else if (greater1_ctx > 0 && greater1_ctx < 3) {
greater1_ctx++;
}
}
first_nz_pos_in_cg = significant_coeff_flag_idx[n_end - 1];
if (lc->cu.cu_transquant_bypass_flag ||
(lc->cu.pred_mode == MODE_INTRA &&
s->sps->implicit_rdpcm_enabled_flag && transform_skip_flag &&
(pred_mode_intra == 10 || pred_mode_intra == 26 )) ||
explicit_rdpcm_flag)
sign_hidden = 0;
else
sign_hidden = (last_nz_pos_in_cg - first_nz_pos_in_cg >= 4);
if (first_greater1_coeff_idx != -1) {
coeff_abs_level_greater1_flag[first_greater1_coeff_idx] += coeff_abs_level_greater2_flag_decode(s, c_idx, ctx_set);
}
if (!s->pps->sign_data_hiding_flag || !sign_hidden ) {
coeff_sign_flag = coeff_sign_flag_decode(s, nb_significant_coeff_flag) << (16 - nb_significant_coeff_flag);
} else {
coeff_sign_flag = coeff_sign_flag_decode(s, nb_significant_coeff_flag - 1) << (16 - (nb_significant_coeff_flag - 1));
}
for (m = 0; m < n_end; m++) {
n = significant_coeff_flag_idx[m];
GET_COORD(offset, n);
if (m < 8) {
trans_coeff_level = 1 + coeff_abs_level_greater1_flag[m];
if (trans_coeff_level == ((m == first_greater1_coeff_idx) ? 3 : 2)) {
int last_coeff_abs_level_remaining = coeff_abs_level_remaining_decode(s, c_rice_param);
trans_coeff_level += last_coeff_abs_level_remaining;
if (trans_coeff_level > (3 << c_rice_param))
c_rice_param = s->sps->persistent_rice_adaptation_enabled_flag ? c_rice_param + 1 : FFMIN(c_rice_param + 1, 4);
if (s->sps->persistent_rice_adaptation_enabled_flag && !rice_init) {
int c_rice_p_init = lc->stat_coeff[sb_type] / 4;
if (last_coeff_abs_level_remaining >= (3 << c_rice_p_init))
lc->stat_coeff[sb_type]++;
else if (2 * last_coeff_abs_level_remaining < (1 << c_rice_p_init))
if (lc->stat_coeff[sb_type] > 0)
lc->stat_coeff[sb_type]--;
rice_init = 1;
}
}
} else {
int last_coeff_abs_level_remaining = coeff_abs_level_remaining_decode(s, c_rice_param);
trans_coeff_level = 1 + last_coeff_abs_level_remaining;
if (trans_coeff_level > (3 << c_rice_param))
c_rice_param = s->sps->persistent_rice_adaptation_enabled_flag ? c_rice_param + 1 : FFMIN(c_rice_param + 1, 4);
if (s->sps->persistent_rice_adaptation_enabled_flag && !rice_init) {
int c_rice_p_init = lc->stat_coeff[sb_type] / 4;
if (last_coeff_abs_level_remaining >= (3 << c_rice_p_init))
lc->stat_coeff[sb_type]++;
else if (2 * last_coeff_abs_level_remaining < (1 << c_rice_p_init))
if (lc->stat_coeff[sb_type] > 0)
lc->stat_coeff[sb_type]--;
rice_init = 1;
}
}