VLFeat + VS2013+opencv 配置
阿新 • • 發佈:2019-02-01
這個可以和opencv配置一樣,只需要配置一次,以後就再也不用配置了,一勞永逸~~~~
vlfeat影象庫包含SIFT,MSER,KDtree,快速shift,K-means等各種影象處理中常用的演算法。最近想看看裡面的東西…….順帶把它配置起來……..
說明:
1.系統環境:win 7 64位專業版,VS2013旗艦版2.4.9
2.opencv 配置很簡單,隨便參考一篇博文就行了,這裡就不敘述了……
1.下載vlfeat
2.安裝
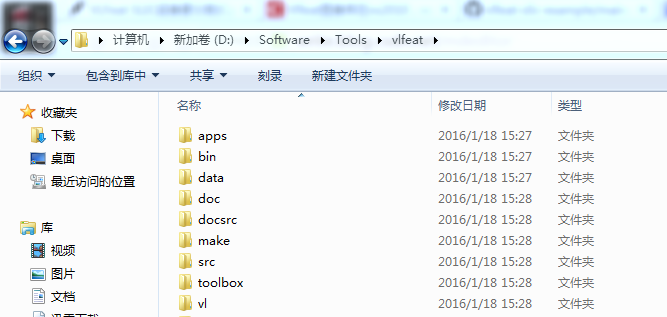
只需要解壓、改名為vlfeat、放到自己指定的目錄就行了。
以我的為例子:D:\Software\Tools—>D:\Software\Tools\vlfeat
3.配置
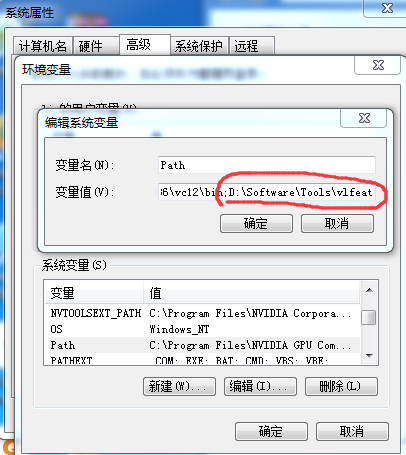
1. 新增系統環境變數:
右擊我的電腦——屬性——高階系統設定——環境變數——系統環境變數——path
2.在VS2013中新建一個cpp:
右擊原始檔——新增cpp
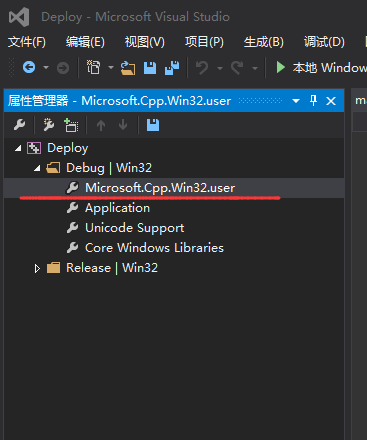
3.檢視——屬性管理器——右擊Microsoft.cpp.win32.user
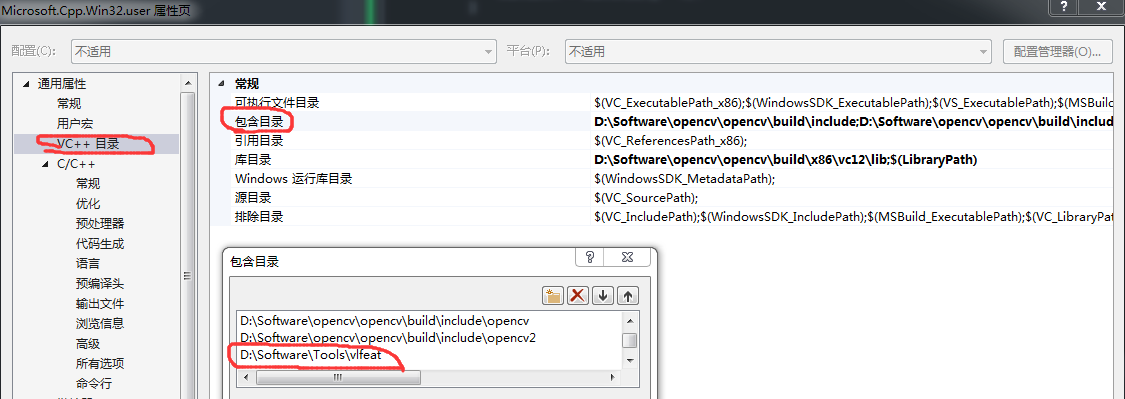
4.在 VC++目錄——包含目錄
新增 D:\Software\Tools\vlfeat
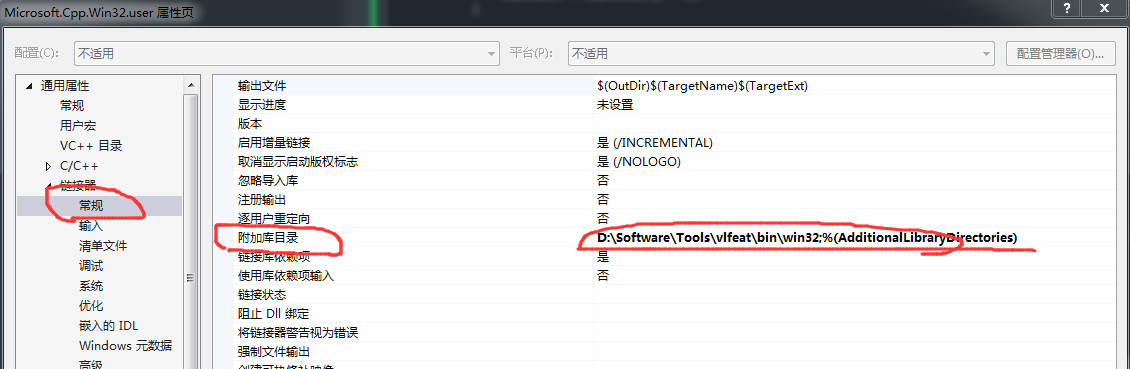
5.在 連結器——常規——附加庫目錄
新增 D:\Software\Tools\vlfeat\bin\win32
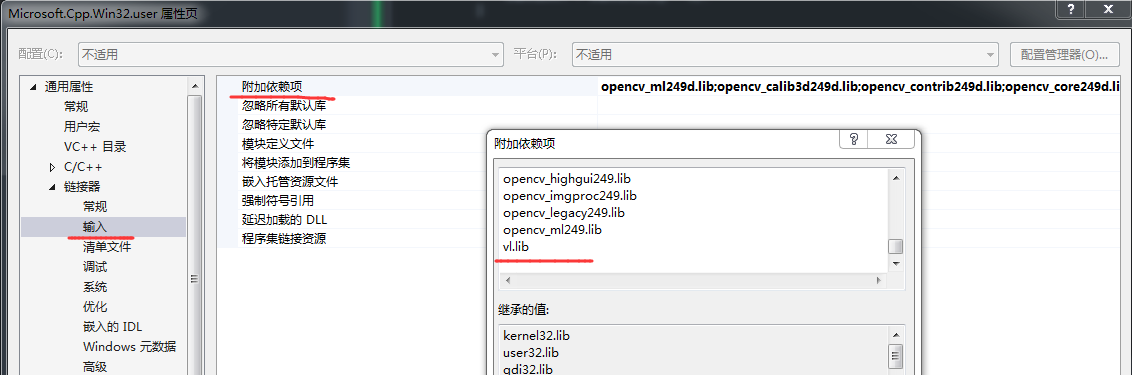
6.在 連結器——輸入——附加依賴庫
新增 vl.lib
4.測試
我的opencv2.4.9是已經配置好的。
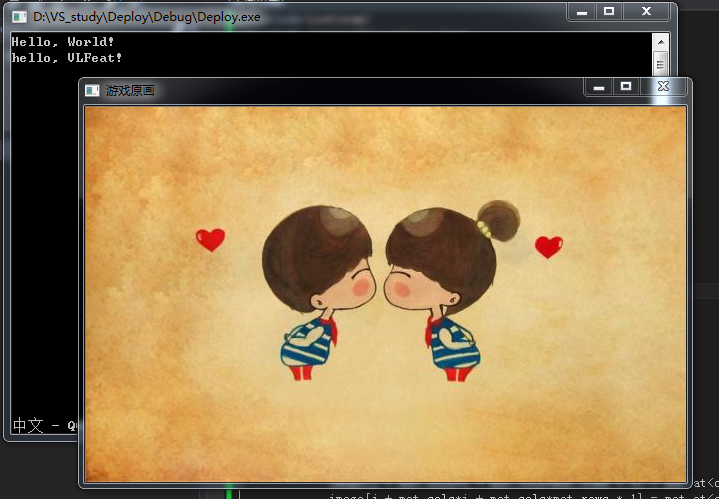
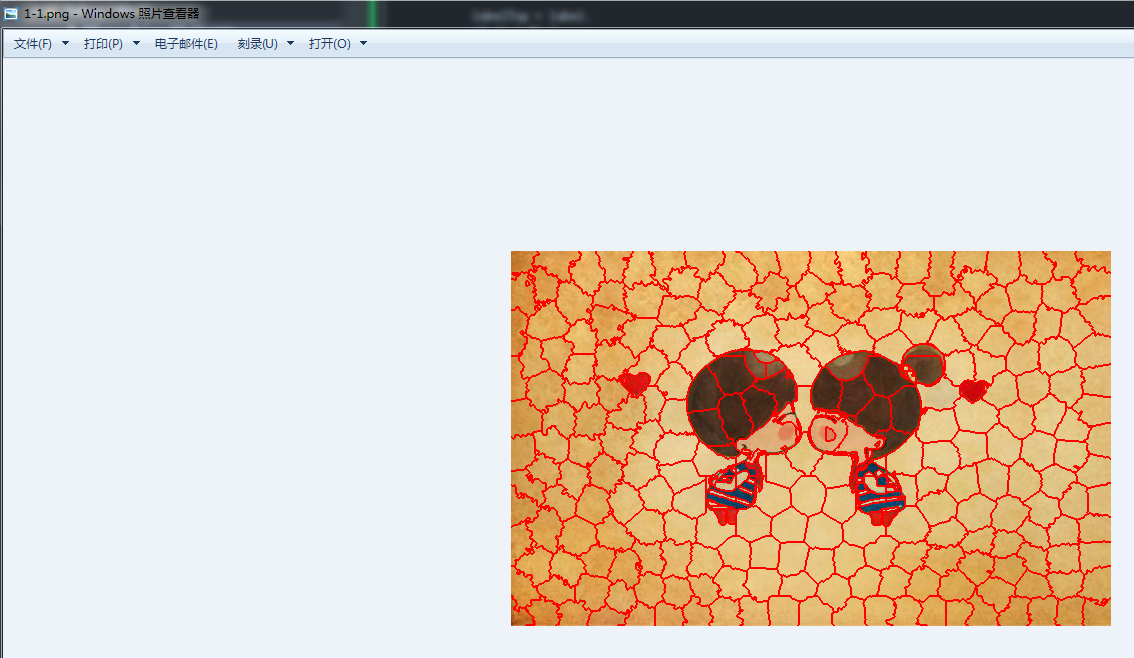
這上面新建的cpp中貼上如下程式碼(影象讀寫+vlfeat中的超畫素分割),可以測試你之前安裝的的 opencv 和 剛才安裝的 vlfeat 有沒有正確配置。
(記得在cpp所在路徑下放置1.jpg和1.png兩張圖片)。
#include<iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
extern "C" {
#include "vl/generic.h"
#include "vl/slic.h" 注意:如果提示缺少vl.dll 不能執行的話
將 D:\Software\Tools\vlfeat\bin\win32路徑下的vl.dll拷貝到專案生成的debug資料夾再編譯就OK了.
效果圖