
2017年第一篇:關於EKF2的討論(總有你想要的)
一、開篇
首先,自我介紹一下,我叫summer,很久很久很久沒有更新blog了,這一段時間確實是太忙了,
然後,很多人應該都知道summer開PX4培訓班了吧,在此非常感謝大家的捧場。
接著,也接觸了很多神一樣的人物,交流一些非常對頭的思想。
雖然,伴隨著年前國內某些知名無人機企業的裁員。
但是,絲毫沒有阻礙大家踴躍邁入“機”年的腳步。
啪啪,經過一年多的發展,PX4算是小有名氣。
“機”年,您準備好了嗎?
二、實驗平臺
協議棧版本:PX4
編譯軟體:MAC/UBUNTU/
硬體平臺:pixhawk
三、
博主:summer
宣告:喝水不忘挖井人,轉載請註明出處。
聯絡方式:138-1483-8574(微信一樣)
四、正文
關於EKF2的討論—總有你想要的
Q:吳神請教下,我們這邊飛px4炸雞,分析日誌發現姿態資料突然都沒有了,感測器資料都還有,是否就是你說ekf2復位,濾波器崩潰的問題?
A:有可能,看下啟用了哪些導航程式。預設的還是互補加inav
Q: 是用ekf2,預設是的。ekf2復位是什麼原因導致的?
A:ekf2復位就是方差負定,或者跑飛了,perf_counter讓它重置,後者可能性極低,因為ekf2是用symbolic computation優化的,比一般直接算快的多。跑飛的概率極小,基本不可能,gcc的庫函式是最穩健的。
Q:那就是方差負定?
A:基本是的,你啟用下sdlog2,log下ekf2的狀態,然後上matlab,求det。det負就是這個,否則就是nan。
Q:方差負定是不是方差出現負數?
A:不是。如果直接沒有了,就是跑飛。負定指的是特徵值
Q:按照你的經驗px4 ekf2復位出現的概率有多大?正常飛行出現的概率。
A:說不好,最近我們團隊出一個ekf2的改進版,新增srekf,保證不重置。
Q:是開源嗎?
A:不過是閉源的,srekf這個玩意工程上一般都要用,但是paul不同意,覺得開銷太大,事實上優化之後只是增加30%計算量,ekf2本身的佔用率在5~10%。
Q:stm32f4可以承受嗎?
A:沒問題的。
Q:嗯 嗯 我先按照你的方法確定下問題 看能不能重現
A:國內公司基本上朋友都跟我說過有這個現象的,所以是肯定的,我自己也有過,insgps組合的時候概率比較大,沒gps的時候比較小。
Q:對 飛定點出現的。
上面的討論時候覺得很高階呢?參加PX4培訓班,這些都不是問題,整套PX4系統全拆解,總有您需要的和想要的東西。
----------------------------------------------------------------------Over---------------------------------------------------------------------------------------
-----------------------------------------------------好吧,廣告來了。。。。。下面才是重點-------------------------------------------------------------
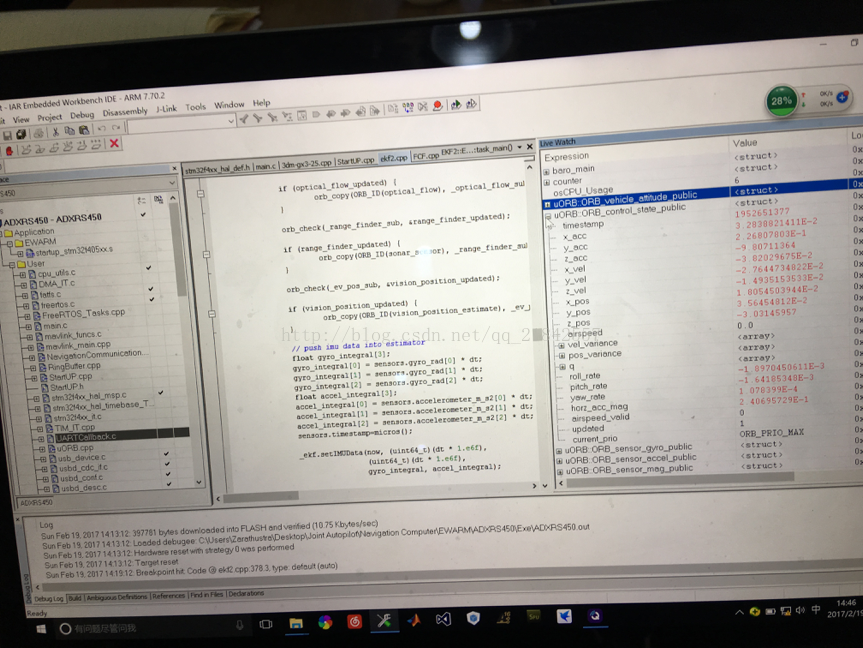
您還在為了PX4的編譯環境而苦惱麼?為了無法除錯PX4程式碼而心煩意亂嗎?在或者想像在IAR下那樣通過斷點的形式進行多工間的切換除錯嗎?看到下面的這個圖示激動麼!!!

現在您不必擔心了,summer團隊以及完全把PX4系統移植到了大家熟悉的IAR下面了,經過三個多月的測試飛行,效果完全可以達到PX4原生的效果,甚至更好,後期還在深入做優化,srekf也通過授權的方式提供使用(這個國內沒有多少人能做哦),不管是高校科研、公司做基礎平臺這套系統都會滿足您的需求。
我叫summer,聯絡方式記不住的話,百度一搜就有。
電話:138-1483-8574(微信也是)
看到下面的是否會更激動呢?


五、總結
經過2016年一年的磨鍊,summer團隊也日益壯大,在此非常感謝團隊內的每一個人,因為有你,我才會成長。
國內平臺在慢慢成型,業內人基本都集中在這個圈子裡面,比如QQ群、微信群、社群論壇、微信公眾號,總有一個能夠給你提供幫助的地方。
也希望通過這麼一個平臺,幫助業內的朋友快速的成長。
對了,2017年3月10無人機開發者大會就要開辦了,地點在南京,很多牛人都會與會哦,不容錯過。
謝謝!!!