
無法查詢功能包路徑的解決辦法:[rospack] Error : package 'chapter2_tuorials' not found
阿新 • • 發佈:2019-02-02
今天在ROS工作空間下建立功能包的時候遇到一個問題:當我找到我的工作空間(cd ~/dev/catkin_ws/src)之後,正確的輸入建立功能包命令$ catkin_create_pkg chapter2_tutorials std_msgs roscpp.顯示建立成功。如圖所示:

但是當我通過命令:
rospack find chapter2_tutorials
尋找功能包的時候卻出現了錯誤提示:
[rospack] Error : package 'chapter2_tuorials' not found
然後,當我檢視功能包內容的時候又是可以顯示的,所以這就有可能是沒有編譯工作空間的原因。問題又來了,我記得昨天在建立空座空間的時候已經編譯了啊!後來發現,原來編譯好的空間沒有建立功能包,在關閉ROS之後再次啟動的時候就失效了,需要再次編譯工作空間就OK了,但是,在不關閉ROS系統的情況下只是關閉Terminal,重新開啟一個新的Terminal是不需要再次編譯工作空間的。現在,開始重新編譯工作空間,輸入命令:
$ cd ~/dev/catkin_ws
$catkin_make
執行將會開始進行工作空間的編譯,截圖如下:
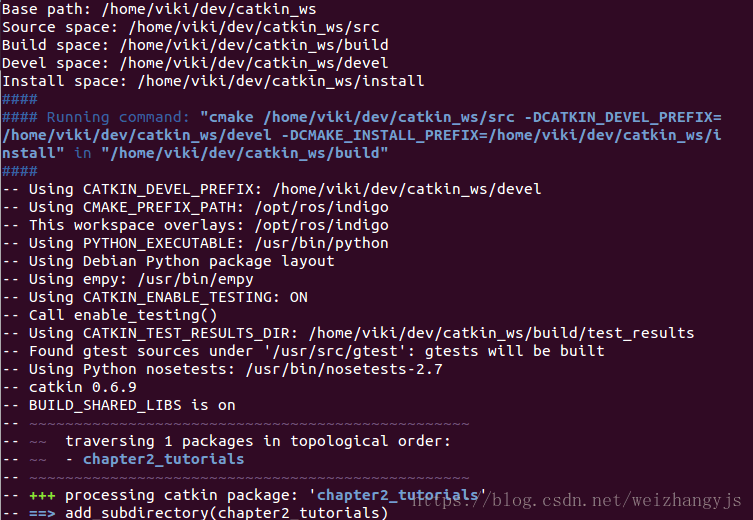
進一步載入setup.bash檔案:$ source devel/setup.bash
再次查詢路徑:
$ rospack find chapter2_tutorials
就OK了,截圖如下:
