
ROS動態調參(dynamic reconfigure)客戶端服務端之C++ Python實現
在ROS系統中,我們需要實時修改引數,並能馬上看到執行效果。這一功能是通過ros dynamic_reconfigure包實現的。官網教程如下:dynamic_reconfigure/Tutorials。
具體操作流程可簡述為如下:首先寫一個.cfg檔案,python語法。然後在CMakeLists.txt檔案中新增generate_dynamic_reconfigure_options用於編譯剛才寫的.cfg檔案,並給出正確路徑,且一定記得用chmod a+x *.cfg將其變為可執行的檔案,這步很關鍵。最後在原始碼中包含編譯後的標頭檔案,一般是Config.h結尾,就可以開始碼程式碼了。
目前官網給出的例程實現dynamic_reconfigure的客戶端只給出了python例程,而服務端給了c++和python兩種方法的實現。在
以下是具體示例:
在CMakeLists.txt中包含
find_package(catkin REQUIRED roscpp rospy dynamic_reconfigure) generate_dynamic_reconfigure_options(cfg/config.cfg) # .cfg檔案的名字 ... # make sure configure headers are built before any node using them add_dependencies({PROJECT_NAME}_node ${PROJECT_NAME}_gencfg) #新增依賴性也很關鍵,否則找不到生成的*Config.h檔案
所寫的.cfg檔案所下,共設定了5種類型的引數:
#!/usr/bin/env python PACKAGE = "my_msgs" from dynamic_reconfigure.parameter_generator_catkin import * gen = ParameterGenerator() gen.add("int_param", int_t, 0, "An Integer parameter", 50, 0, 100) gen.add("double_param", double_t, 0, "A Double parameter", .5, 0, 1) gen.add("str_param", str_t, 0, "A String parameter", "Hello World") gen.add("bool_param", bool_t, 0, "A Boolean parameter", True) size_enum = gen.enum([gen.const("Small", int_t, 0, "A small constant"), gen.const("Medium", int_t, 1, "A medium constant"), gen.const("Large", int_t, 2, "A large constant"), gen.const("Extralarge", int_t, 3, "A extra large constant")], "An enum to set size") gen.add("size", int_t, 0, "A size parameter which is edited via an enum", 1, 0, 3, edit_method=size_enum) exit(gen.generate(PACKAGE, "my_msgs", "tutorials"))
伺服器端具體實現的關鍵程式碼:
dynamic_reconfigure::Server<my_msgs::tutorialsConfig> server;
dynamic_reconfigure::Server<my_msgs::tutorialsConfig>::CallbackType f; //用於回撥
f = boost::bind(&callback, _1, _2); //回撥函式,用於獲取最新引數
server.setCallback(f);
客戶端具體實現的關鍵程式碼(C++):
dynamic_reconfigure::Client<my_msgs::tutorialsConfig> client("dynamic_srv", dynCallBack); //訂閱服務,並設定回撥函式用於回讀改變後的最新引數
my_msgs::tutorialsConfig config;
ros::Rate loop_rate(10);
while (ros::ok())
{
c++;
static bool ret = true;
static int cnt = 0;
config.bool_param = !ret;
config.int_param = cnt;
config.double_param = 1/((double)(cnt+1));
client.setConfiguration(config); //用於更新引數
ret = !ret;
ros::spinOnce();
loop_rate.sleep();
}注:用C++實現的話,如果所用版本dynamic_reconfigure包中沒有client.h標頭檔案,得從github上下載原始碼,然後將client.h加入到工程當中。
客戶端具體實現的關鍵程式碼(python):
rospy.init_node("dynamic_client")
rospy.wait_for_service("dynamic_srv/set_parameters")
client = dynamic_reconfigure.client.Client("dynamic_srv", timeout=10, config_callback=callback) //callback用於回讀引數
client.update_configuration({"int_param":x, "double_param":(1/(x+1)), "str_param":str(rospy.get_rostime()), "bool_param":b, "size": 1}) //update_configuration函式用於更新引數在該客戶端中,本人寫了一個迴圈不斷去改變引數的值,其效果類似於開啟rqt_reconfigure去調節引數,當然也可以做一個GUI介面去改變引數的值。
程式碼完成後,編譯,執行roscore,並設定工作空間的環境變數。
開啟伺服器端節點,再開啟客戶端節點(python和c++程式開啟一個即可)。
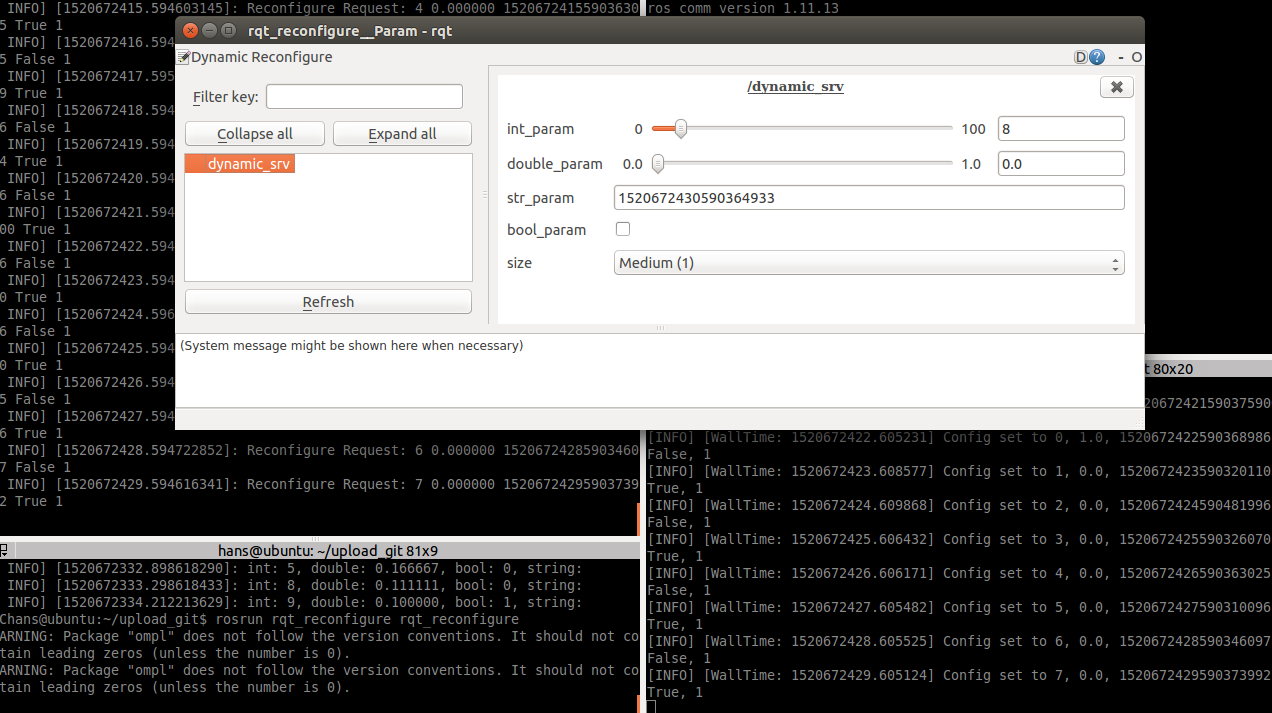
用rqt_configure檢視,可以發現裡面的引數值在不斷變化。截圖如下:
工程原始碼下載地址:
Enjoy!