
[視覺] 計算機視覺知識點小結
Gestalt Laws(格式塔法則)
Law of Proximity(接近原則)
物體越接近,那麼它們更容易被感知為同一組的。
Law of Similarity(相似原則)
若物體具有相似特徵,那麼它們更容易被感知為同一組的。
Law of Common Fate(共方向原則)
若物體向共同方向運動,那麼它們更容易被感知為同一組的。
Law of Symmetry(對稱原則)
我們傾向於把不對稱,不完全,複雜的圖形感知成對稱、完全、簡單的圖形。
Law of Continuity(連續原則)
我們傾向於感知連續,而不是零散。也就是我們會把一些看起來零碎的東西看做是連續的。
Law of Closure(封閉原則)
哪怕物體不完整(不存在),我們也能根據認知腦補出缺失的部分。
Marr視覺表示框架的三個階段?
Primal Sketch
進行影象處理。提取角度、邊緣、紋理、線條、邊界等基本特徵。
2.5D Sketch
以觀測點為中心的座標系中,恢復場景可見部分深度、法線、輪廓等資訊。
3D Model
以物體為中心的座標系中,恢復、表示和識別三維物體。
二值影象
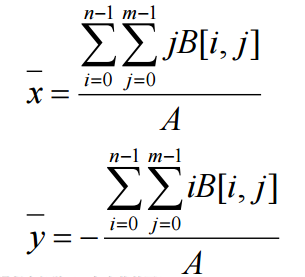
幾何特性
面積: 區域中心:
區域中心:
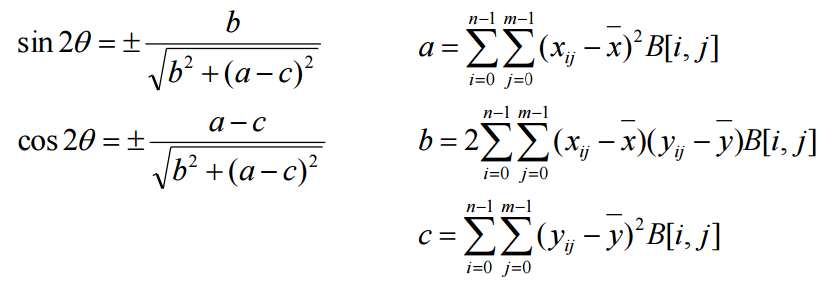
方向: 有些形狀無方向,其餘以長軸方向為形狀的方向。 方向的直線方程:

求出夾角:
 伸長率:
伸長率:
 密集度:
密集度:
 形態比:
區域的最小外界矩形長寬比。
尤拉數:連通分量數 - 洞數
形態比:
區域的最小外界矩形長寬比。
尤拉數:連通分量數 - 洞數
投影計算
水平投影:計算每一列畫素為1的個數。 垂直投影:計算每一行畫素為1的個數。 對角線投影:從左下到右上,計算每一個對角線畫素為1的個數。
連通區域
連通分量標記演算法(貫序)
第一個方法是遞迴,也就是找到沒有標記的畫素值為1的點,遞迴標記鄰接點。 第二個方法是貫序,就是從左到右,從上到下掃描。對於當前掃描到的畫素點,如果它的畫素值為1: 1)上面點和左面點僅有一個有標記,複製 2)上面點和左面點標記相同,複製 3)上面點和左面點標記不同,複製上面點的標記,並記錄為等價標記。 4)上面點和左面點都無標記,分配一個新的標記。區域邊界跟蹤演算法
(1)從左到右,從上到下掃描影象,求得起始點。 (2)c為當前跟蹤的畫素點: 從n1~n8,找到第一個邊界點。則找到的點為新的c。
(3)重複上述操作。直到回到第一個邊界點。
從n1~n8,找到第一個邊界點。則找到的點為新的c。
(3)重複上述操作。直到回到第一個邊界點。
邊緣
模板卷積(能計算卷積)
Origin of Edges
surface normal discontinuity(表面法線不連續) depth discontinuity(深度不連續) surface color discontinuity(表面顏色不連續) illumination discontinuity(光照不連續)邊緣檢測的基本思想
邊緣檢測的目標是找到影象中突變(不連續)的地方。大多數語義和形狀的資訊都能從邊緣資訊中獲取。基於一階的邊緣檢測(梯度)
(1)Roberts交叉運算元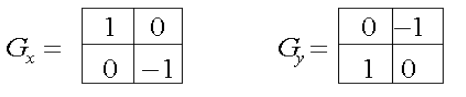 (2)Sobel運算元
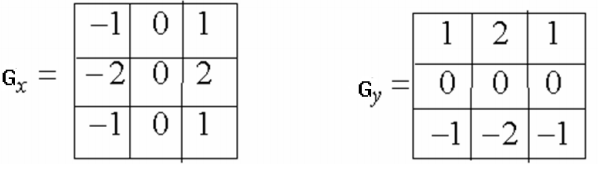
(2)Sobel運算元
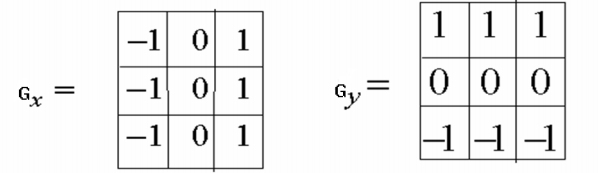
 (3)Prewitt運算元
(3)Prewitt運算元
基於二階的邊緣檢測
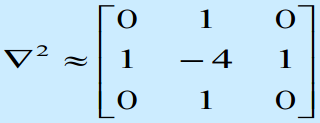
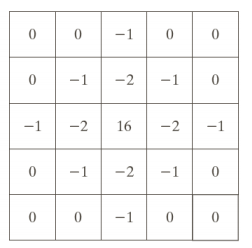
原理:二階導數過零點為邊緣 -Laplacian運算元
 -LoG運算元
先與高斯函式卷積,再求拉普拉斯微分;或先求拉普拉斯微分,再與影象卷積。
-LoG運算元
先與高斯函式卷積,再求拉普拉斯微分;或先求拉普拉斯微分,再與影象卷積。
(拉普拉斯) 為什麼高斯:平滑去噪和邊緣檢測是一對矛盾,應用高斯函式的一階導數,在二者之間獲得最佳的平衡
Canny邊緣檢測
1.高斯濾波

2.一階偏導計算梯度和方向

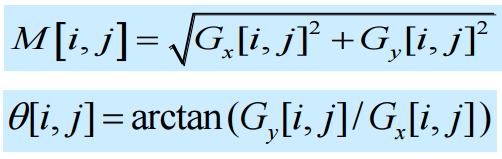
3.梯度幅值非極大值抑制
 將方向角離散到四個扇區之一。
將方向角離散到四個扇區之一。
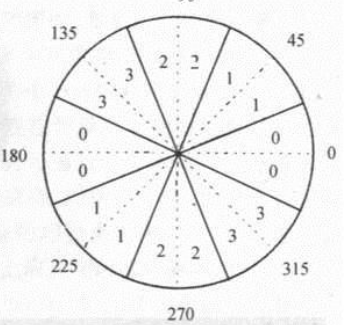
 (如果M[i,j]不比沿梯度線方向上的兩個相鄰點幅值大,則N[i,j] = 0)
(如果M[i,j]不比沿梯度線方向上的兩個相鄰點幅值大,則N[i,j] = 0)
4.用雙閾值檢測和連線邊緣
(1)設高低兩個閾值 (2)大於兩個閾值:是邊緣;大於低閾值小於高閾值,可能是邊緣。 在高閾值邊緣圖中出現斷點後,在低閾值邊緣圖中搜索邊緣點。區域性特徵
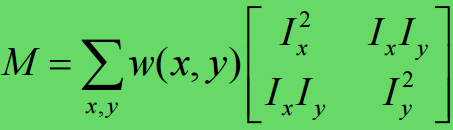
Harris角點檢測
 w(x,y)為視窗,I 為導數,u,v為偏移。
以上公式可近似為:
w(x,y)為視窗,I 為導數,u,v為偏移。
以上公式可近似為:
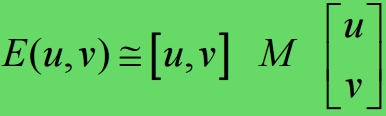 其中:
其中:
 推導過程:
推導過程:
 我們可以求出M的特徵值,如果兩個特徵值都很大,並且比較接近,那麼是角點;如果一個遠大於另一個,那麼是邊;否則是平面區域。
用響應函式R來衡量是否是角點,計算方法如下(k取0.04-0.06):
我們可以求出M的特徵值,如果兩個特徵值都很大,並且比較接近,那麼是角點;如果一個遠大於另一個,那麼是邊;否則是平面區域。
用響應函式R來衡量是否是角點,計算方法如下(k取0.04-0.06):
 若 R>0(大於某一閾值),則為角點;R<0,則為邊;R絕對值很小,則為平面區域。
選取R得到的符合條件點的區域性最大值作為結果。
若 R>0(大於某一閾值),則為角點;R<0,則為邊;R絕對值很小,則為平面區域。
選取R得到的符合條件點的區域性最大值作為結果。
SIFT描述子
1.構建尺度空間,建立影象金字塔。 2.尋找極值點(相鄰的26個點中最大/最小值) 3.去除不好的特徵點:使用近似的harris corner,檢測關鍵點的位置和尺度,並且去除邊緣響應點。 4.16X16的視窗來檢測特徵。 對每個畫素計算邊的朝向(梯度角度-90),然後轉換到8個方向上,並分割到4X4的網格中。(共128維資料) 剔除不好的邊(梯度閾值)。 建立存留邊朝向的直方圖。 利用關鍵點鄰域畫素的梯度方向分佈特性為每個關鍵點指定方向引數,使運算元具備旋轉不變性。尺度不變的原理
哪怕處在不同的尺度,它們對應的區域是相同的。
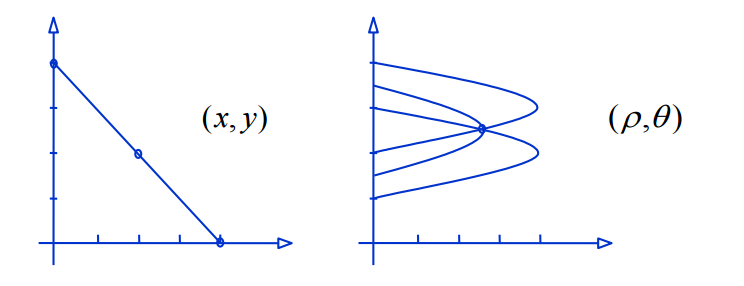
Hough變換直線檢測
影象中每一點對引數組合進行表決,贏得多數票的引數組合為勝者(結果)。
用極座標來表示直線,從(x,y)轉換到(p,0)空間。
 1.量化引數空間(到合適的精度)
2.初始化累加器為零。
3.對每一點,在其滿足的引數方程對應的累加器加1.
4.得到累加器最大值對應模型的引數
1.量化引數空間(到合適的精度)
2.初始化累加器為零。
3.對每一點,在其滿足的引數方程對應的累加器加1.
4.得到累加器最大值對應模型的引數
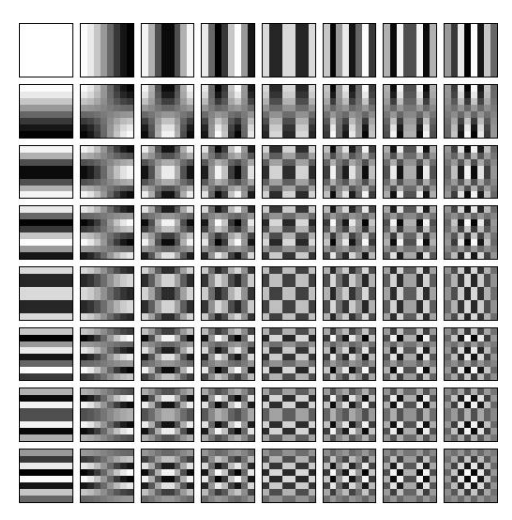
影象的傅立葉變換
變換:用正弦來表示,對於二維影象而言,由以下的基影象表示:
 低頻與高頻:亮度灰度劇烈變化的地方是高頻(影象邊緣和輪廓的度量),對應邊緣;變化不大的是低頻(影象強度的綜合度量),對應大片色塊。近處看到的是高頻分量,遠處觀察到的是低頻分量。
低頻與高頻:亮度灰度劇烈變化的地方是高頻(影象邊緣和輪廓的度量),對應邊緣;變化不大的是低頻(影象強度的綜合度量),對應大片色塊。近處看到的是高頻分量,遠處觀察到的是低頻分量。
怎麼理解拉普拉斯金字塔的每一層是帶通濾波?
拉普拉斯金字塔是將影象下采樣後再上取樣得到的差值影象。 相減 保留細節 高通 下采樣 降噪 低通相機模型
景深:
攝像機鏡頭能夠取得清晰影象的成像所測定的被攝物體前後距離範圍。
景深大,背景和物體都很清楚;景深小,物體清楚,但背景虛化。
景深隨鏡頭的焦距、光圈值、拍攝距離而變化。對於固定焦距和拍攝距離,使用光圈越小,景深越大。
焦距越短,鏡頭的視場角越寬。

理想的針孔相機(pinhole camera)模型
投影公式: 引數:
內參數
引數:
內參數
 fx,fy焦距,cx,cy主點座標
fx,fy焦距,cx,cy主點座標
 其中,dx和dy是x和y方向一個畫素的長度;r是;u0和v0代表影象中心和原點座標之間橫縱相差的畫素個數。
其中,dx和dy是x和y方向一個畫素的長度;r是;u0和v0代表影象中心和原點座標之間橫縱相差的畫素個數。
考慮傾斜:
相關推薦
[視覺] 計算機視覺知識點小結
Gestalt Laws(格式塔法則) Law of Proximity(接近原則) 物體越接近,那麼它們更容易被感知為同一組的。 Law of Similarity(相似原則) 若物體具有相似特徵,那麼它們更容易被感知
計算機視覺 | 計算機視覺相關演算法及工具
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 計算機視覺資料集:https://github.com/Michael
機器視覺,計算機視覺,人機互動的關係
由於最近畢業設計打算寫一遍有關手勢識別完成人機互動的論文,看了一些網上的論文,大量論文提及機器視覺和計算機視覺,然而發現自己對這方面的定義不清楚,所以上網搜了下,把自己理解寫下來。 機器視覺(Ma
計算機網路 知識點小結1
【TCP/UDP定義】 TCP(Transmission Control Protocol,傳輸控制協議)是一種面向連線的、可靠的、基於位元組流的傳輸層通訊協議,由IETF的RFC 793定義。 UDP (User Datagram Protocol,使
計算機網路 知識點小結2
1、TCP為什麼需要3次握手,4次斷開? “三次握手”的目的是“為了防止已失效的連線請求報文段突然又傳送到了服務端,因而產生錯誤”。 client發出的第一個連線請求報文段並沒有丟失,而是在某個網路結點長時間的滯留了,以致延誤到連線釋放以後的某個時間才到達
程式設計師常見面試之 計算機網路 知識點小結
前言 悉心整理校正了計算機網路的面試常用知識點,文章圖文並茂,通俗易懂,希望對大家有所幫助。 TCP提供面向連線的、可靠的資料流傳輸,而UDP提供的是非面向連線的、不可靠的資料流傳輸。 TCP傳輸單位稱為TCP報文段,UDP傳輸單位稱為使用者資料報。T
計算機視覺-計算機視覺入坑(一):計算機視覺入坑前的資訊採集和了解
之前一直覺得自己學的雜而不專,在之後的學習和幹活歷程中也不斷髮現自己確實需要靜下心來鑽研,讓自己像身邊的師兄一樣能有一技之長,能在社會上有自己的立足之地。講真在計算機這個龐大的體系下挑選出一個方向來確實蠻難,自己挑來挑去,有種亂花漸欲迷人眼的感覺,不過就目前自己的興趣、性格和
斯坦福李飛飛-深度學習與計算機視覺 計算機視覺歷史回顧與介紹
斯坦福計算機視覺相關課程 Hubel-Wiesel模型 Hubel, D. H., & Wiesel, T. N. (1959). Receptive fields of single neurones in the cat’s striat
《用Python構建機器學習》——第十章:計算機視覺-模式識別 讀後小結
本文是《Building Machine Learning Systems with Python》第十章的筆記。亞馬遜英文版連結(話說亞馬遜現在圖書的介紹影象做得很贊啊!) 這本書和圖靈出版的《機器學習實戰》一書有點類似。《機器學習實戰》那本書是非常建議購買一本的,如果這
『python』OpenCV3計算機視覺庫安裝
targe cond 最新 cnblogs enc 2.0 sent lan oca 1.下載OpenCV: https://codeload.github.com/Itseez/opencv/zip/3.0.0 2.解壓下載相關依賴: sudo apt-get inst
常用牛人主頁鏈接(計算機視覺、模式識別、機器學習相關方向,陸續更新。。。。)【轉】
short psu works charles 貝葉斯 learning 數學 ocr 相關 轉自:http://blog.csdn.net/goodshot/article/details/53214935 目錄(?)[-] The Kalman
『python』計算機視覺_OpenCV3庫安裝
找不到 新建 imp size libs redis pac nload .py Anaconda打包安裝: conda install --channel https://conda.anaconda.org/menpo opencv3 驗證: >>&g
Azure 認知服務 (3) 計算機視覺API - 分析圖像,使用C#代碼
iat query med ron oid sage pos png wait 《Windows Azure Platform 系列文章目錄》 在上一節中Azure 認知服務 (2) 計算機視覺API - 分析圖像,筆者介紹了如何使用API測試控制臺進行調試
『python』計算機視覺_OpenCV3目標檢測器(待續)
類型 print import 目標 return 視覺 != read svm bulid-in目標檢測器 調用內部函數進行人體檢測,實際效果並不好。民工三連: hog = cv2.HOGDescriptor()
計算機視覺(ComputerVision, CV)相關領域的站點鏈接
條碼識別 航空航天 類信息 模型生成 win public 語言識別 don char 關於計算機視覺(ComputerVision, CV)相關領域的站點鏈接,當中有CV牛人的主頁。CV研究小組的主頁,CV領域的paper,代碼。CV領域的最新動態。國
常用牛人主頁鏈接(計算機視覺、模式識別、機器學習相關方向,陸續更新
bject detail ebo abi err 技術 arch college eoj 牛人主頁(主頁有很多論文代碼) Serge Belongie at UC San Diego Antonio Torralba at MIT Alexei Ffros at CMU C
計算機視覺方向三大頂級會議
物理 來看 之一 兩個 spf eccv 比較 5% 內容 ICCV 的全稱是 IEEE International Conference on Computer Vision,國際計算機視覺大會,是計算機視覺方向的三大頂級會議之一,通常每兩年召開一次,2005 年 10
轉載:計算機視覺方向相關課程與書籍
ndk jdi itl zip back p12 rand monk context 原地址:https://github.com/jbhuang0604/awesome-computer-vision Books Computer Vision Computer
騰訊 AI Lab 計算機視覺中心人臉 & OCR團隊近期成果介紹(3)
之前 val 檢測 activit 服務器 get 取消 算法 創新 歡迎大家前往騰訊雲社區,獲取更多騰訊海量技術實踐幹貨哦~ 作者:周景超 在上一期中介紹了我們團隊部分已公開的國際領先的研究成果,近期我們有些新的成果和大家進一步分享。 1 人臉進展 人臉是最重要的視覺
計算機視覺---初級學習
計算機 圖像 png 視覺 com 證書 分享 工程目錄 http opencv免配置方法: 工程目錄下多出倆文件 Mat M(3,2,CV_8UC3,Scalar(0,0,225)); 高度 寬度 每個位置是占3字節,如果是圖像,是rgb, 元素是8