
家庭IOT監測之攝像頭資料上傳ONENET
阿新 • • 發佈:2019-02-04
本篇目標:將攝像頭OV7670的照片資料,轉換成BMP二進位制,上傳到ONENET平臺,用於遠端監測。
材料準備:
- 之前移植的溫溼度及紅外修改工程:(溫溼度及紅外修改工程),繼續往裡面移植攝像頭驅動上傳程式碼。
- STM32F407最終攝像頭上傳ONENET平臺工程:(STM32F4攝像頭資料上傳onenet),裡面包含溫溼度,紅外感應,攝像頭照片按一定時間週期上傳ONENET平臺。
攝像頭OV7670硬體連線與介面
移植攝像頭等相關驅動
用keil開啟準備材料1的stm32f407_iot工程,往裡面新增程式碼,驅動攝像頭OV7670:
- 將準備材料最終修改中的攝像頭驅動資料夾(ov7670)與(rgb2bmp)拷貝到stm32f407_iot標準工程dev資料夾下。
- 在Manage Project Items新增資料夾ov7670與rgb2bmp,然後新增剛才對應拷貝資料夾下的C檔案。
- 在Options->C/C++->Include Paths新增dev下複製資料夾ov7670與rgb2bmp的路徑。
- 需要修改ov7670.h與sccb.h檔案中對應的IO引腳,修改成自己對應的引腳口,應該用註釋標出。
- 仔細檢查ov7670.c與sccb.c檔案中的引腳初始化函式,確認相關RESET、PWDN、SCCB等引腳初始化正確;修改dcmi.c的My_DCMI_Init函式中對於DCMI相關引腳的初始化,與自己的引腳對應。
- 在main.c中新增標頭檔案:
#include - 向main函式中新增程式碼,如下:
//....
/* WIFI模組IO初始化配置 */
NET_DEVICE_IO_Init();
/* 攝像頭OV7670相關初始化配置 */
if (OV7670_Init() != 0) //新新增
{
printf("Ov7670 Init Failed.\r\n");
}
else
{
printf("Ov7670 Init Succeed.\r\n" - 編譯通過即可,這樣就像上一章一樣,移植成功了ov7670的驅動程式碼,即可使用ov7670攝像頭了。
RGB轉BMP程式碼
在修改之前,先來了解一下,攝像頭的資料和BMP檔案的資料有哪些不同:
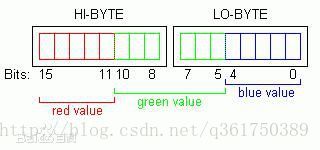
- 攝像頭資料分很多種,RGB565、RGB555、RGB444、YUV、YCbCr等,這裡選取的是RGB565(常用於液晶屏顯示直接輸出)。RGB565包含16位,如下:
- BMP格式資料由幾部分組成:
(1)bmp檔案頭:共包含有14個位元組:
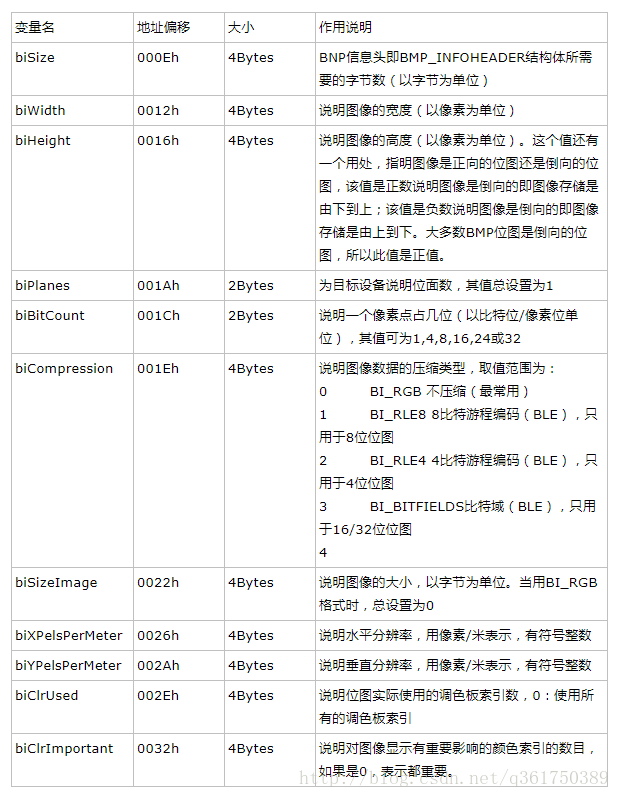
(2)點陣圖資訊頭:共包含40個位元組;
(3)調色盤:單色,16色,256色包含調色盤;16位,24位,32位不包含調色盤;
(4)點陣圖資料;

現在來修改程式碼:
- 程式碼攝像頭將獲取到的RGB565資料存在了陣列camera_buffer[]中,要將資料轉換成BMP檔案,需要增加bmp檔案頭和資訊頭共54位元組;
- 定位檔案ov7670.c的17行camera_buffer陣列,陣列增加54位元組,修改成:
uint16_t camera_buffer[PIC_WIDTH*PIC_HEIGHT+27]={0};- 定位ov7670.h的23行,同樣修改成:
extern uint16_t camera_buffer[PIC_WIDTH*PIC_HEIGHT+27];- 修改DMA開始地址與資料長度,往後移54個位元組,定位ov7670.c的88行,修改DCMI_DMA_Init傳入引數:
DCMI_DMA_Init((uint32_t)&camera_buffer+54,(sizeof(camera_buffer)-54)/4,DMA_MemoryDataSize_HalfWord,DMA_MemoryInc_Enable);- 這樣一來陣列camera_buffer前54位元組放bmp資料頭,因為是16位點陣圖,沒有調色盤,接下來的位元組都放ov7670的rgb565資料。
- 呼叫rgb2bmp.c中的rgb565tobmp()函式即可將camera_buffer陣列修改成二進位制bmp檔案。
這裡貼出RGB2BMP檔案的程式碼:
rgb2bmp.c:
//主函式
#include <string.h>
#include <stdlib.h>
#include <stdio.h>
#include "rgb2bmp.h"
static void RGBtoBMP(char *bmp_buffer, int nWidth, int nHeight, char bits)
{
BmpHead m_BMPHeader;
char bfType[2] = { 'B','M' };
m_BMPHeader.imageSize = bits * nWidth*nHeight + 54;
m_BMPHeader.blank = 0;
m_BMPHeader.startPosition = 54;
memcpy(bmp_buffer, bfType, sizeof(bfType));
bmp_buffer += sizeof(bfType);
memcpy(bmp_buffer, &m_BMPHeader.imageSize, sizeof(m_BMPHeader.imageSize));
bmp_buffer += sizeof(m_BMPHeader.imageSize);
memcpy(bmp_buffer, &m_BMPHeader.blank, sizeof(m_BMPHeader.blank));
bmp_buffer += sizeof(m_BMPHeader.blank);
memcpy(bmp_buffer, &m_BMPHeader.startPosition, sizeof(m_BMPHeader.startPosition));
bmp_buffer += sizeof(m_BMPHeader.startPosition);
InfoHead m_BMPInfoHeader;
m_BMPInfoHeader.Length = 40;
m_BMPInfoHeader.width = nWidth;
m_BMPInfoHeader.height = nHeight;
m_BMPInfoHeader.colorPlane = 1;
m_BMPInfoHeader.bitColor = BMP_BITS;
m_BMPInfoHeader.zipFormat = 0;
m_BMPInfoHeader.realSize = bits * nWidth*nHeight;
m_BMPInfoHeader.xPels = 2835;
m_BMPInfoHeader.yPels = 2835;
m_BMPInfoHeader.colorUse = 0;
m_BMPInfoHeader.colorImportant = 0;
memcpy(bmp_buffer, &m_BMPInfoHeader.Length, sizeof(m_BMPInfoHeader.Length));
bmp_buffer += sizeof(m_BMPInfoHeader.Length);
memcpy(bmp_buffer, &m_BMPInfoHeader.width, sizeof(m_BMPInfoHeader.width));
bmp_buffer += sizeof(m_BMPInfoHeader.width);
memcpy(bmp_buffer, &m_BMPInfoHeader.height, sizeof(m_BMPInfoHeader.height));
bmp_buffer += sizeof(m_BMPInfoHeader.height);
memcpy(bmp_buffer, &m_BMPInfoHeader.colorPlane, sizeof(m_BMPInfoHeader.colorPlane));
bmp_buffer += sizeof(m_BMPInfoHeader.colorPlane);
memcpy(bmp_buffer, &m_BMPInfoHeader.bitColor, sizeof(m_BMPInfoHeader.bitColor));
bmp_buffer += sizeof(m_BMPInfoHeader.bitColor);
memcpy(bmp_buffer, &m_BMPInfoHeader.zipFormat, sizeof(m_BMPInfoHeader.zipFormat));
bmp_buffer += sizeof(m_BMPInfoHeader.zipFormat);
memcpy(bmp_buffer, &m_BMPInfoHeader.realSize, sizeof(m_BMPInfoHeader.realSize));
bmp_buffer += sizeof(m_BMPInfoHeader.realSize);
memcpy(bmp_buffer, &m_BMPInfoHeader.xPels, sizeof(m_BMPInfoHeader.xPels));
bmp_buffer += sizeof(m_BMPInfoHeader.xPels);
memcpy(bmp_buffer, &m_BMPInfoHeader.yPels, sizeof(m_BMPInfoHeader.yPels));
bmp_buffer += sizeof(m_BMPInfoHeader.yPels);
memcpy(bmp_buffer, &m_BMPInfoHeader.colorUse, sizeof(m_BMPInfoHeader.colorUse));
bmp_buffer += sizeof(m_BMPInfoHeader.colorUse);
memcpy(bmp_buffer, &m_BMPInfoHeader.colorImportant, sizeof(m_BMPInfoHeader.colorImportant));
bmp_buffer += sizeof(m_BMPInfoHeader.colorImportant);
}
void rgb565tobmp(char *rgb_buffer, unsigned short nWidth, unsigned short nHeight)
{
char bits = BMP_BITS / 8;
int i = 0;
int j = 0;
unsigned char R,G,B;
unsigned short RGB555,RGB565;
char *rgb_buff;
rgb_buff = rgb_buffer;
rgb_buffer += 54;
/* RGB565轉RGB555 */
for (i = 0; i < nHeight; i++)
{
for (j = 0; j < nWidth; j++)
{
/* 讀取RGB565 */
RGB565 = (*(rgb_buffer+1)<<8 | *rgb_buffer);
/* 分別提取R、G、B資料 */
B = RGB565 & 0x001f;
G = (RGB565 >> 6) & 0x001f;
R = (RGB565 >> 11) & 0x001f;
/* 轉換成RGB555資料 */
RGB555 = (R << 10) | (G << 5) | (B);
/* 寫入陣列 */
*rgb_buffer = RGB555;
*(rgb_buffer+1) = RGB555 >> 8;
rgb_buffer += 2;
}
}
/* 將BMP檔案頭和資訊頭寫入陣列 */
RGBtoBMP(rgb_buff, nWidth, nHeight, bits);
}
rgb2bmp.h:
//rgb2bmp.h檔案
#include <stdio.h>
#define BMP_BITS 16
typedef unsigned char BYTE;
typedef unsigned short WORD;
// BMP影象各部分說明如下
/***********
第一部分 點陣圖檔案頭
該結構的長度是固定的,為14個位元組,各個域的依次如下:
2byte :檔案型別,必須是0x4d42,即字串"BM"。
4byte :整個檔案大小
4byte :保留字,為0
4byte :從檔案頭到實際的點陣圖影象資料的偏移位元組數。
*************/
typedef struct
{ long imageSize;
long blank;
long startPosition;
}BmpHead;
/*********************
第二部分 點陣圖資訊頭
該結構的長度也是固定的,為40個位元組,各個域的依次說明如下:
4byte :本結構的長度,值為40
4byte :影象的寬度是多少象素。
4byte :影象的高度是多少象素。
2Byte :必須是1。
2Byte :表示顏色時用到的位數,常用的值為1(黑白二色圖)、4(16色圖)、8(256色圖)、24(真彩色圖)。
4byte :指定點陣圖是否壓縮,有效值為BI_RGB,BI_RLE8,BI_RLE4,BI_BITFIELDS。Windows點陣圖可採用RLE4和RLE8的壓縮格式,BI_RGB表示不壓縮。
4byte :指定實際的點陣圖影象資料佔用的位元組數,可用以下的公式計算出來:
影象資料 = Width' * Height * 表示每個象素顏色佔用的byte數(即顏色位數/8,24bit圖為3,256色為1)
要注意的是:上述公式中的biWidth'必須是4的整數倍(不是biWidth,而是大於或等於biWidth的最小4的整數倍)。
如果biCompression為BI_RGB,則該項可能為0。
4byte :目標裝置的水平解析度。
4byte :目標裝置的垂直解析度。
4byte :本影象實際用到的顏色數,如果該值為0,則用到的顏色數為2的(顏色位數)次冪,如顏色位數為8,2^8=256,即256色的點陣圖
4byte :指定本影象中重要的顏色數,如果該值為0,則認為所有的顏色都是重要的。
***********************************/
typedef struct
{
long Length;
long width;
long height;
WORD colorPlane;
WORD bitColor;
long zipFormat;
long realSize;
long xPels;
long yPels;
long colorUse;
long colorImportant;
/* void show()
{
printf("infoHead Length:%dn",Length);
printf("width&height:%d*%dn",width,height);
printf("colorPlane:%dn",colorPlane);
printf("bitColor:%dn",bitColor);
printf("Compression Format:%dn",zipFormat);
printf("Image Real Size:%dn",realSize);
printf("Pels(X,Y):(%d,%d)n",xPels,yPels);
printf("colorUse:%dn",colorUse);
printf("Important Color:%dn",colorImportant);
}*/
}InfoHead;
/***************************
第三部分 調色盤結構 顏色表
對於256色BMP點陣圖,顏色位數為8,需要2^8 = 256個調色盤;
對於24bitBMP點陣圖,各象素RGB值直接儲存在影象資料區,不需要調色盤,不存在調色盤區
rgbBlue: 該顏色的藍色分量。
rgbGreen: 該顏色的綠色分量。
rgbRed: 該顏色的紅色分量。
rgbReserved:保留值。
************************/
typedef struct
{ BYTE rgbBlue;
BYTE rgbGreen;
BYTE rgbRed;
BYTE rgbReserved;
/* void show(void)
{
printf("Mix Plate B,G,R:%d %d %dn",rgbBlue,rgbGreen,rgbRed);
}*/
}RGBMixPlate;
void rgb565tobmp(char *rgb_buffer, unsigned short nWidth, unsigned short nHeight);
新增程式碼上傳攝像頭資料
準備好了轉換工作,就可以將BMP傳輸到ONENET平臺上了:
- 定位net_io.c檔案第374行,新增標頭檔案:
#include "dcmi.h"- 修改TIM3_IRQHandler中斷函式:
void TIM3_IRQHandler(void)
{
//清中斷標識
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
//---------------- 中斷處理 ------------------//
if(oneNetInfo.netWork == 1)
{
//修改新增判斷條件,在上傳的照片過程中等待
if (oneNetInfo.sendData != SEND_TYPE_PICTURE)
{
net_send_time++;
}
if (net_send_time == 1)
{
oneNetInfo.sendData = SEND_TYPE_DATA;
LED2_TOGGLE;
}
else if ((net_send_time % 25) == 0) //每25s傳送心跳請求
{
oneNetInfo.sendData = SEND_TYPE_HEART;
LED2_TOGGLE;
}
else if (net_send_time == NET_TIME_DELAY/2)
{
//修改新增判斷條件,只有在空閒的時候在啟動攝像頭,否則等待
if (oneNetInfo.sendData == SEND_TYPE_OK)
{
//啟動攝像頭拍照,等待DMA傳輸
DCMI_Start();
LED2_TOGGLE;
}
}
else if (net_send_time == NET_TIME_DELAY)
{
net_send_time = 0;
}
}
LED1_TOGGLE;
OneNet_Check_Heart();
} - 定位dcmi.c檔案,新增標頭檔案:
#include "onenet.h"- 定位dcmi.c檔案第78行,在DMA2_Stream1_IRQHandler中斷中置位上傳圖片標誌:
oneNetInfo.sendData = SEND_TYPE_PICTURE;- 定位main函式,在135行中新增如下函式:
//....
case SEND_TYPE_PICTURE:
//新新增
#ifdef OV7670_DBG
ShanWai_SendCamera(camera_buffer+27, PIC_WIDTH, PIC_HEIGHT);
#endif
rgb565tobmp((char *)camera_buffer, PIC_WIDTH, PIC_HEIGHT);
oneNetInfo.sendData = OneNet_SendData(FORMAT_TYPE2, NULL, NULL, NULL, 0);
printf("\r\nOnenet Picture Ready.\r\n");
//....- 定位onenet.c,新增標頭檔案:
#include "ov7670.h"- 定位onenet.c第211行,修改替換OneNet_SendData_Picture參入函式如下:
OneNet_SendData_Picture(devid, (char *)camera_buffer, 320*200*2+54);- 優化onenet驅動部分函式,定位EdpKit.c第369的EDP_PacketSaveData函式,將第二個引數從int16型改為int32,防止出現圖片過大而出現解析問題導致上傳不了的問題:
uint8 EDP_PacketSaveData(const int8 *devid, int32 send_len, int8 *type_bin_head, SaveDataType type, EDP_PACKET_STRUCTURE *edpPacket)- 同樣,在EdpKit.h第112行如上修改成一樣:
uint8 EDP_PacketSaveData(const int8 *devid, int32 send_len, int8 *type_bin_head, SaveDataType type, EDP_PACKET_STRUCTURE *edpPacket);- 定位EdpKit.c第372行的remain_len變數,同樣改為int32型:
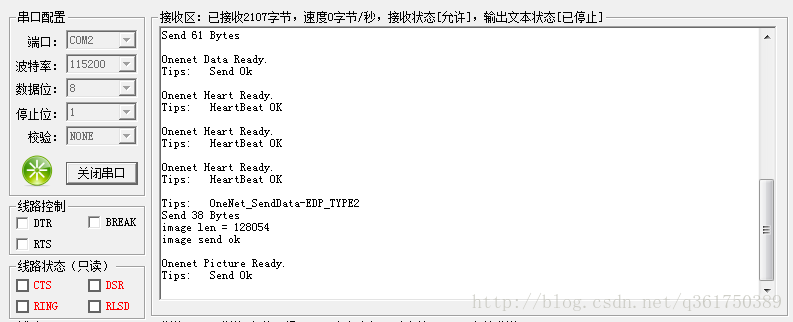
int32 remain_len = 0;- 編譯,通過後燒寫到stm32f407中,觀察串列埠列印,是否上傳照片工程:
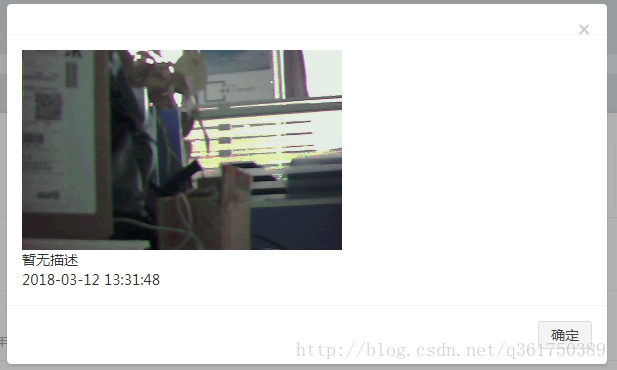
- 登入onenet平臺檢視資料,是否有照片資料上傳,如圖:

ps:若是發現上傳的照片有垂直,水平顛倒,可以定位ov7670config.h檔案第82行,0x1E暫存器:
{0x1e, 0x27},//0x07不翻轉;0x17垂直翻轉;0x27水平翻轉;0x37水平垂直翻轉ONENET修改應用加入照片
進入自己onenet裝置的應用管理,編輯:
- 選擇元件庫,圖片;
- 屬性圖片型別選擇圖片格式的資料流;
- 資料流選擇剛才上傳照片的資料流;
- 調整圖片大小合適即可;
- 點擊發布即可;
在自己的應用主頁就可以看到自己的應用資料了,也可以把連結傳送給別人檢視,如圖:
小結:關於攝像頭上傳資料到ONENET的程式碼中,有許多可以優化的地方,比如:
(1)可以把攝像頭的啟動函式DCMI_Start()放在紅外外部中斷裡面,紅外一感應到範圍裡面有人,就用攝像頭拍攝下來。
(2)現在用的是WIFI的UART介面,速度只有115200,傳輸圖片需要10s左右之久,所以可以將WIFI改為SPI介面與STM32F407相連,可以大大地加快傳輸速率。
(3)想過用來傳輸視訊流,但是stm32f407有點不夠用,RAM也比較小,如果換成ARM,再用H.264壓縮,可以大大降低資料傳輸壓力,再用WIFI視訊視訊流的傳輸,初步設想,後期若是視訊,再更新部落格。
以上移植基本上就完成了,結合以前的資料,就已經把溫溼度、紅外感應資料以及攝像頭照片資料都上傳到ONENET平臺了,可以達到一個簡單的監控的目的了,但只是初步的實現,在除錯過程中還存在一些不惹人注意的bug,所以需要耐心多次測試修改,加油,共勉~