
Python 實現感知器模型、兩層神經網路
阿新 • • 發佈:2019-02-05
python 3.4 因為使用了 numpy
這裡我們首先實現一個感知器模型來實現下面的對應關係
[[0,0,1], ——- 0
[0,1,1], ——- 1
[1,0,1], ——- 0
[1,1,1]] ——- 1
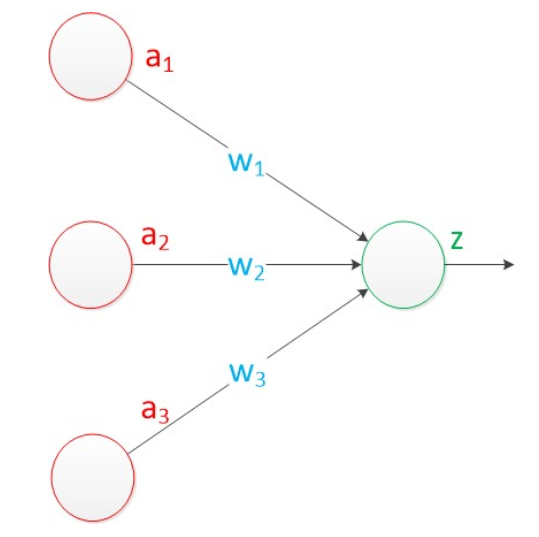
從上面的資料可以看出:輸入是三通道,輸出是單通道。
這裡的啟用函式我們使用 sigmoid 函式 f(x)=1/(1+exp(-x))
其導數推導如下所示:

L0=W*X;
z=f(L0);
error=y-z;
delta =error * f'(L0) * X;
W=W+delta;// python 程式碼如下:
import numpy as np
#sigmoid function
def nonlin(x, deriv = False):
if(deriv==True):
return x*(1-x)
return 1/(1+np.exp(-x))
# input dataset
X=np.array([[0,0,1],
[0,1,1],
[1,0,1],
[1,1,1]])
# output dataset
y=np.array([[0,1,0,1]]).T
#seed( ) 用於指定隨機數生成時所用演算法開始的整數值, 從輸出結果可以看出基本實現了對應關係。
下面再用兩層網路來實現上面的任務,這裡加了一個隱層,隱層包含4個神經元。
import numpy as np
def nonlin(x, deriv = False):
if(deriv == True):
return x*(1-x)
else:
return 1/(1+np.exp(-x))
#input dataset
X = np.array([[0,0,1],
[0,1,1],
[1,0,1],
[1,1,1]])
#output dataset
y = np.array([[0,1,1,0]]).T
#the first-hidden layer weight value
syn0 = 2*np.random.random((3,4)) - 1
#the hidden-output layer weight value
syn1 = 2*np.random.random((4,1)) - 1
for j in range(60000):
l0 = X
#the first layer,and the input layer
l1 = nonlin(np.dot(l0,syn0))
#the second layer,and the hidden layer
l2 = nonlin(np.dot(l1,syn1))
#the third layer,and the output layer
l2_error = y-l2
#the hidden-output layer error
if(j%10000) == 0:
print "Error:"+str(np.mean(l2_error))
l2_delta = l2_error*nonlin(l2,deriv = True)
l1_error = l2_delta.dot(syn1.T)
#the first-hidden layer error
l1_delta = l1_error*nonlin(l1,deriv = True)
syn1 += l1.T.dot(l2_delta)
syn0 += l0.T.dot(l1_delta)
print "outout after Training:"
print l2