【Person Re-ID】AlignedReID: Surpassing Human-Level Performance in Person Re-Identification
一. 論文背景
論文:AlignedReID: Surpassing Human-Level Performance inPerson Re-Identification 【點選下載】
Caffe程式碼:【Github】
首先通過下圖來看ReID面臨的問題:

由於檢測框不準確(a-b),姿態變化(c-d),遮擋(e-f)和 近似外觀(g-h)。
為了解決以上問題,一些研究將重心放在part-based learning,在整體特徵無法準確描述的情況下,利用區域性特徵來強調差異。
區域性特徵有很多方法,最常用的 水平劃分,PAR(基於FCN),AttentionModel,RPP 等。
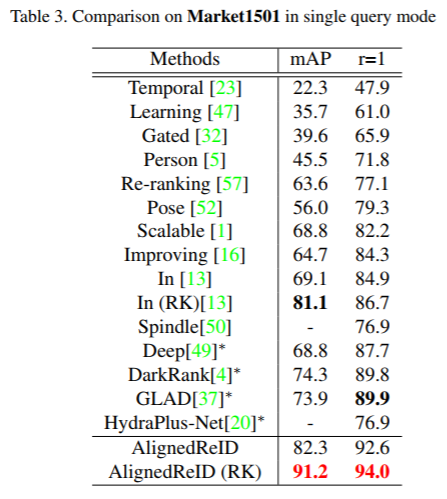
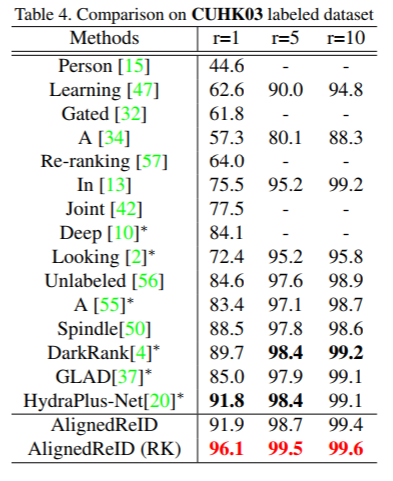
演算法提到了兩個創新點,動態對齊(Dynamic Alignment)和 協同學習(Mutual Learning),演算法在Market1501和CUHK03上的Rank-1達到了94.0%和96.1%,首次在行人再識別問題上超越了人類表現。
二. 演算法描述
最關鍵的 Aligned ReID 框架圖,下圖是不包含 Mutual Learning 的情況:
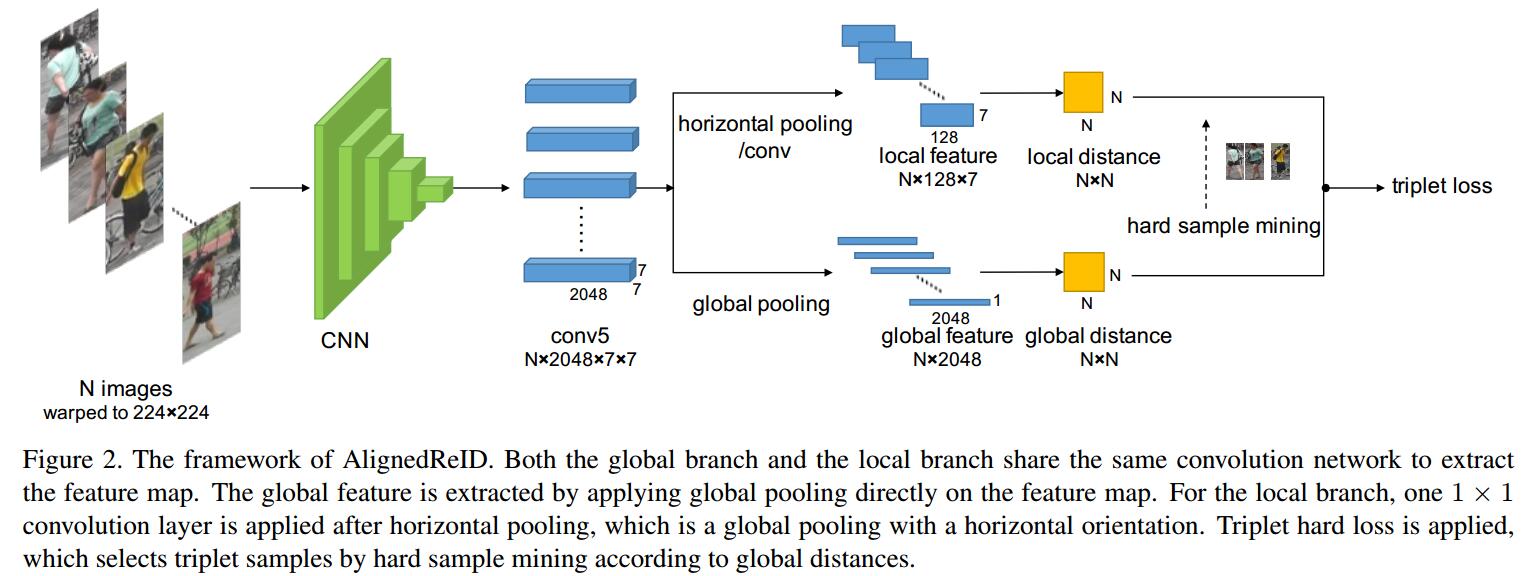
這裡面 N 為一個Batch(論文中N=128),通過一個共享的特徵提取層後,分別提取區域性特徵和全域性特徵,通過N*N的距離矩陣描述,計算triplet loss。
在一個min-batch中,通過global distance計算距離,選擇 相同標籤差異最大、不同標籤差異最小的
2.1 動態規劃
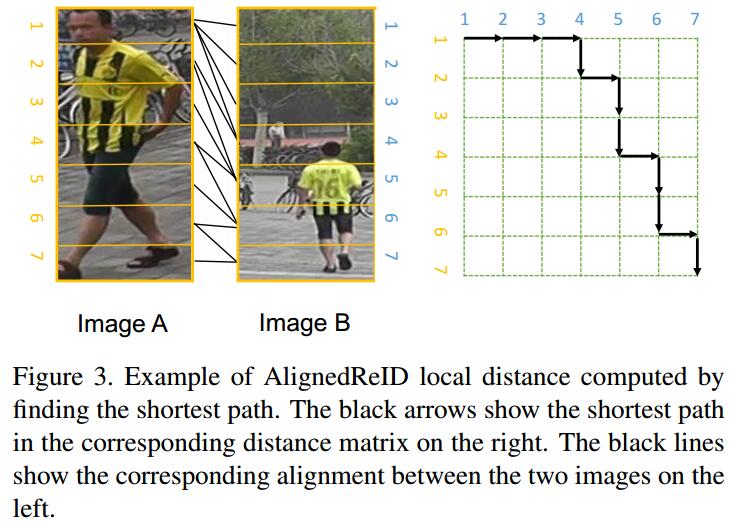
動態規劃實際是為了解決兩幅影象之間的 Part對齊問題,如圖 [part1]<->[part4]
1)Part model能夠對目標特徵進行細粒度刻畫,是非常必要的
2)最短路徑包含非相關特徵(如part1<->part1),這非但不會對結果造成影響,而且還會對維護垂直方向對齊的次序起著至關重要的作用。
即 路徑規劃本身隱含了自上而下的順序。
注:非相關特徵距離d比較大,其梯度接近於0,因此對於最短路徑的貢獻是比較小的。
有興趣的同學可以參考下面的公式證明一下。
3)路徑規劃過程
先來看part距離公式(H表示水平劃分,文中已驗證最好的H=6):

規劃從(1,1)到(H,H)的最短路徑,參考公式:

規劃得到的SH,H最短路徑即是兩幅影象最佳的Local 匹配。
2.2 協同學習
協同學習的框架:
1) 通過兩個網路(上圖θ1和θ2)實現 Mutual Learning
每個網路又包含 Classification Learning和 Metric Learning,用於分類和距離度量。
通過 Classification Mutual Loss 和 Metric Mutual Loss 實現協同學習。
注:兩個網路相互學習,沒有主次之分。
2)預測階段,只用到了全域性特徵,沒有采用區域性特徵
原因在於,通過協同學習,提取的全域性特徵在區域性特徵影響下,已經能夠準確描述影象,和區域性特徵並無區別,作者通過實驗驗證(僅在小gallery上Rank-1有所提升,0.3-0.5%)。
當然還有一個原因,就是全域性特徵的提取更快,一致性描述更強。
3)Batch解構
對於一個Batch內N幅影象,通過global distance計算兩兩之間的距離,得到N*N的距離矩陣M,其中Mi,j表示影象(i,j)之間的距離,Mutual LearningLoss定義為:
2.3 Re-Ranking
重排序對於ReID來講通常是非常必要的,能夠顯著提高準確率,本文采用的Re-Ranking方法並無不同,本節不展開。
三.實驗結果
演算法在測試過程中已經超過了人類的認知,在典型資料集上表現也非常不錯。和state-of-the-art 方法的對比: