
netlink socket(linux核心模組與使用者態之間通訊例項)
1.1 實現內容
1. 功能
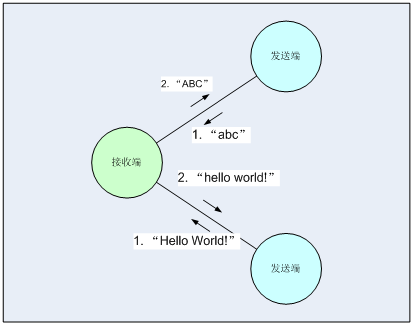
Ø 實現一個併發的echo伺服器程式,它(接收端)將接收到字串進行轉換處理後,返回給傳送端;允許有多個傳送端同時存在;
Ø 字串的處理包括:直接返回、全部轉換為大寫、全部轉換為小寫;處理方式應可以配置,配置方式包括全域性(預設)及每“傳送-接收對(xmit/recv peer)”的。配置轉換時,不應該影響正在處理的字串;
Ø 為模擬處理過程的延時,接收端中每個字元轉換新增200ms的延遲;
Ø 接收端中需統計其處理字元的數量,並且給外部提供命令形式的查詢手段;
Ø 具備必要的例外處理,如記憶體不足等、client未關閉連結即意外退出等;
1.2 驗收成果
1. 程式結構(應用專業方向)
Ø 以有連結的client-server方式實現echo程式
Ø 存在多個client,client與server在同一個系統中,它們之間採用domain socket或netlink socket相連;client之間沒有關聯
Ø client是一個程式的多個例項,而server只允許執行一個例項
2. 程式結構(核心專業方向)
Ø 核心模組作為接收端(伺服器),而傳送端(客戶端)是使用者空間的應用程式;
Ø 核心模組可動態載入與解除安裝
Ø 驅動相關組:
· 建立虛擬字元型裝置,用於接受來自客戶端的字元
· 使用ioctl控制介面來配置echo處理方式,ioctl的cmd自定義;
· 併發使用驅動的多例項來模擬;
Ø 非驅動相關組:
· 建立核心執行緒,作為核心中的server,用於,通訊可採用netlink socket或其它可用的方式;
· 使用netlink介面來配置echo處理轉換方式;
使用者態netlink socket原始碼
#include <stdio.h>
#include <stdlib.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <unistd.h>
#include <string.h>
#include <sys/time.h>
#include <linux/netlink.h>
#include <signal.h>
#define NETLINK_TEST 17
#define MSG_LEN 125
#define BUF_LEN 125
#define TIME 210
int skfd;
struct sockaddr_nl local;
struct sockaddr_nl dest;
struct nlmsghdr *message;
struct msg_to_kernel
{
struct nlmsghdr hdr;
char data[MSG_LEN];
};
struct u_packet_info
{
struct nlmsghdr hdr;
char msg[MSG_LEN];
};
static void sig_pipe(int sign)
{
printf("Catch a SIGPIPE signal\n");
close(skfd);
kill(local.nl_pid,SIGUSR1);
exit(-1);
}
int init_netlink(void)
{
//char *send_data = "aaaaaaaaaaaaBBBBBBBBBBBBBBBBBBaaaaaaaaaaaaaaaaBBBBBBBBBBBB11111112222";
char send_data[BUF_LEN];
message = (struct nlmsghdr *)malloc(1);
skfd = socket(PF_NETLINK, SOCK_RAW, NETLINK_TEST);
if(skfd < 0){
printf("can not create a netlink socket\n");
return -1;
}
memset(&local, 0, sizeof(local));
local.nl_family = AF_NETLINK;
local.nl_pid = getpid();
local.nl_groups = 0;
if(bind(skfd, (struct sockaddr *)&local, sizeof(local)) != 0){
printf("bind() error\n");
return -1;
}
memset(&dest, 0, sizeof(dest));
dest.nl_family = AF_NETLINK;
dest.nl_pid = 0;
dest.nl_groups = 0;
memset(message, '\0', sizeof(struct nlmsghdr));
message->nlmsg_len = NLMSG_SPACE(MSG_LEN);
message->nlmsg_flags = 0;
message->nlmsg_type = 0;
message->nlmsg_seq = 0;
message->nlmsg_pid = local.nl_pid;
while(1) {
printf("input the data: ");
fgets(send_data, MSG_LEN, stdin);
if(0 == (strlen(send_data)-1))
continue;
else
break;
}
memcpy(NLMSG_DATA(message), send_data, strlen(send_data)-1);
printf("send to kernel: %s, send_id: %d send_len: %d\n", \
(char *)NLMSG_DATA(message),local.nl_pid, strlen(send_data)-1);
return 0;
}
/**
* NAME: ngsa_test_init
*
* DESCRIPTION:
* ngsa test model 初始化
* @*psdhdr
* @*addr
* @size
*
* RETURN:
*/
int main(int argc, char* argv[])
{
int ret,len;
socklen_t destlen = sizeof(struct sockaddr_nl);
struct u_packet_info info;
fd_set fd_sets;
struct timeval select_time;
signal(SIGINT, sig_pipe);
signal(SIGINT, sig_pipe);
ret = init_netlink();
if(ret<0) {
close(skfd);
perror("netlink failure!");
exit(-1);
}
FD_ZERO( &fd_sets );
FD_SET( skfd, &fd_sets);
len = sendto(skfd, message, message->nlmsg_len, 0,(struct sockaddr *)&dest, sizeof(dest));
if(!len){
perror("send pid:");
exit(-1);
}
select_time.tv_sec= TIME;
select_time.tv_usec = 0;
ret = select(skfd+1,&fd_sets,NULL,NULL,&select_time);
if(ret > 0){
/* 接受核心態確認資訊 */
len = recvfrom(skfd, &info, sizeof(struct u_packet_info),0, (struct sockaddr*)&dest, &destlen);
printf("recv from kernel: %s, recv_len: %d\n",(char *)info.msg, strlen(info.msg));
}else if(ret < 0) {
perror("\n error! \n");
exit(-1);
}else {
printf("\n kernel server disconncet! \n");
kill(local.nl_pid, SIGUSR1);
}
/* 核心和使用者關閉通訊 */
close(skfd);
return 0;
}
#########################################################################
linux核心原始碼(module.c)
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/types.h>
#include <linux/sched.h>
#include <net/sock.h>
#include <linux/netlink.h>
#include <linux/kthread.h>
#include <linux/sched.h>
#include <linux/err.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/cdev.h>
#define MEMDEV_MAJOR 255 /* 預設的mem的主裝置號 */
#define MEMDEV_NR_DEVS 1 /* 裝置數 */
#define MEMDEV_SIZE 1024 /* 分配記憶體的大小 */
#define NETLINK_TEST 17
#define UP_TO_LOW 0
#define LOW_TO_UP 1
#define MAX_PID_COUNT 100
#define MSG_LEN 125
#ifndef SLEEP_MILLI_SEC
#define SLEEP_MILLI_SEC(nMillisec) \
do { \
long timeout = (nMillisec) * HZ /1000; \
while (timeout > 0) { \
timeout = schedule_timeout(timeout); \
} \
}while(0);
#endif
static int echo_major = MEMDEV_MAJOR;
module_param(echo_major, int, S_IRUGO);
struct echo_dev *echo_devp; /*裝置結構體指標*/
struct cdev cdev;
char *echo_dev = "echodev";
static struct sock *netlinkfd = NULL;
static struct task_struct *task_test[MAX_PID_COUNT];
static int pid_index = 0;
static int char_num = 0;
static int char_cnvt_flag = 0;
/* mem裝置描述結構體 */
struct echo_dev
{
char *data; /* 分配到的記憶體的起始地址 */
unsigned long size; /* 記憶體的大小 */
};
struct{
__u32 pid;
}user_process;
/* netlink */
struct echo_netlink
{
__u32 pid; /* netlink pid */
char buf[MSG_LEN]; /* data */
int length; /* buf len */
};
struct echo_netlink client_netlink[MAX_PID_COUNT];
static int echo_open(struct inode *inode, struct file *filp);
static ssize_t echo_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos);
static long echo_ioctl(struct file *filp, unsigned int cmd, unsigned long arg);
static const struct file_operations echo_fops =
{
.owner = THIS_MODULE,
.open = echo_open,
.read = echo_read,
.unlocked_ioctl = echo_ioctl,
};
static int echo_open(struct inode *inode, struct file *filp)
{
/*獲取次裝置號*/
printk(KERN_DEBUG"[kernel space] open char device!!\n");
return 0;
}
static ssize_t echo_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
printk(KERN_DEBUG"[kernel space] test_netlink_exit!!\n");
return char_num;
}
static long echo_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int result = 0;
switch(cmd) {
case UP_TO_LOW:
char_cnvt_flag = 0;
break;
case LOW_TO_UP:
char_cnvt_flag = 1;
break;
default :
result = -1;
break;
}
printk(KERN_DEBUG"[kernel space] ioctl cmd: %d\n",char_cnvt_flag);
return result;
}
int init_char_device(void)
{
int i,result;
dev_t devno = MKDEV(echo_major, 0);
if (echo_major)
/* 靜態申請裝置號*/
result = register_chrdev_region(devno, 2, "echodev");
else {
/* 動態分配裝置號 */
result = alloc_chrdev_region(&devno, 0, 2, "echodev");
echo_major = MAJOR(devno);
}
if ( result<0 )
return result;
/* 初始化cdev結構 */
cdev_init(&cdev, &echo_fops);
cdev.owner = THIS_MODULE;
cdev.ops = &echo_fops;
/* 註冊字元裝置 */
cdev_add(&cdev, MKDEV(echo_major, 0), MEMDEV_NR_DEVS);
/* 為裝置描述結構分配記憶體 */
echo_devp = kmalloc(MEMDEV_NR_DEVS * sizeof(struct echo_dev), GFP_KERNEL);
/* 申請失敗 */
if (!echo_devp)
{
result = -1;
goto fail_malloc;
}
memset(echo_devp, 0, sizeof(struct echo_dev));
/* 為裝置分配記憶體 */
for(i= 0; i < MEMDEV_NR_DEVS; i++) {
echo_devp[i].size = MEMDEV_SIZE;
echo_devp[i].data = kmalloc(MEMDEV_SIZE, GFP_KERNEL);
memset(echo_devp[i].data, 0, MEMDEV_SIZE);
}
printk(KERN_ERR"[kernel space] create char device successfuly!\n");
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return result;
}
void delete_device(void)
{
/* 登出裝置 */
cdev_del(&cdev);
/* 釋放裝置號 */
unregister_chrdev_region(MKDEV(echo_major, 0), 2);
printk(KERN_DEBUG"[kernel space] echo_cdev_del!!\n");
}
static int kernel_send_thread(void *index)
{
int threadindex = *((int *)index);
int size;
struct sk_buff *skb;
unsigned char *old_tail;
struct nlmsghdr *nlh; //報文頭
int retval;
int i=0;
size = NLMSG_SPACE(client_netlink[threadindex].length);
/* 分配一個新的套接字快取,使用GFP_ATOMIC標誌程序不會被置為睡眠 */
skb = alloc_skb(size, GFP_ATOMIC);
/* 初始化一個netlink訊息首部 */
nlh = nlmsg_put(skb, 0, 0, 0, NLMSG_SPACE(client_netlink[threadindex].length)-sizeof(struct nlmsghdr), 0);
old_tail = skb->tail;
//memcpy(NLMSG_DATA(nlh), client_netlink[i].buf, client_netlink[i].length); //填充資料區
strcpy(NLMSG_DATA(nlh), client_netlink[threadindex].buf); //填充資料區
nlh->nlmsg_len = skb->tail - old_tail; //設定訊息長度
/* 設定控制欄位 */
NETLINK_CB(skb).pid = 0;
NETLINK_CB(skb).dst_group = 0;
printk(KERN_DEBUG "[kernel space] send to user: %s, send_pid: %d, send_len: %d\n", \
(char *)NLMSG_DATA((struct nlmsghdr *)skb->data), client_netlink[threadindex].pid, \
client_netlink[threadindex].length);
/* 傳送資料 */
retval = netlink_unicast(netlinkfd, skb, client_netlink[threadindex].pid, MSG_DONTWAIT);
if (retval<0) {
printk(KERN_DEBUG "[kernel space] client closed: \n");
}
while(!(i = kthread_should_stop())) {
printk(KERN_DEBUG "[kernel space] kthread_should_stop: %d\n", i);
SLEEP_MILLI_SEC(1000*10);
}
return 0;
}
void char_convert(int id)
{
int len = client_netlink[id].length;
int i = 0;
client_netlink[id].buf[len] = '\0';
if( UP_TO_LOW == char_cnvt_flag ) {
printk(KERN_DEBUG "[kernel space] UP_TO_LOW\n");
while(client_netlink[id].buf[i] != '\0') {
if(client_netlink[id].buf[i] >= 'A' && client_netlink[id].buf[i] <= 'Z') {
client_netlink[id].buf[i] = client_netlink[id].buf[i] + 0x20;
mdelay(200);
}
i++;
}
}
else if( LOW_TO_UP == char_cnvt_flag ) {
printk(KERN_DEBUG "[kernel space] LOW_TO_UP\n");
while(client_netlink[id].buf[i] != '\0') {
if(client_netlink[id].buf[i] >= 'a' && client_netlink[id].buf[i] <= 'z') {
client_netlink[id].buf[i] = client_netlink[id].buf[i] - 0x20;
mdelay(200);
}
i++;
}
}
char_num += len;
}
void run_netlink_thread(int thread_index)
{
int err;
char process_name[64] = {0};
void* data = kmalloc(sizeof(int), GFP_ATOMIC);
*(int *)data = thread_index;
snprintf(process_name, 63, "child_thread-%d", thread_index);
task_test[thread_index] = kthread_create(kernel_send_thread, data, process_name);
if(IS_ERR(task_test[thread_index])) {
err = PTR_ERR(task_test[thread_index]);
printk(KERN_DEBUG "[kernel space] creat child thread failure \n");
} else {
printk(KERN_DEBUG "[kernel space] creat child_thread-%d \n", thread_index);
wake_up_process(task_test[thread_index]);
}
}
void buf_deal(int id)
{
char_convert(id);
/* 喚醒執行緒 */
run_netlink_thread(id);
}
void kernel_recv_thread(struct sk_buff *__skb)
{
struct sk_buff *skb;
struct nlmsghdr *nlh = NULL;
char *recv_data = NULL;
int pid_id = 0;
printk(KERN_DEBUG "[kernel space] begin kernel_recv\n");
skb = skb_get(__skb);
if(skb->len >= NLMSG_SPACE(0)) {
nlh = nlmsg_hdr(skb);
if(pid_index < MAX_PID_COUNT) {
client_netlink[pid_index].pid = nlh->nlmsg_pid;
recv_data = NLMSG_DATA(nlh);
strcpy(client_netlink[pid_index].buf,recv_data);
client_netlink[pid_index].length = strlen(recv_data);
printk(KERN_DEBUG "[kernel space] recv from user: %s, recv_pid: %d, recv_len: %d\n", \
(char *)NLMSG_DATA(nlh), client_netlink[pid_index].pid, strlen(recv_data));
pid_id = pid_index;
pid_index++;
buf_deal(pid_id);
} else {
printk(KERN_DEBUG "[kernel space] out of pid\n");
}
kfree_skb(skb);
}
}
int init_netlink(void)
{
netlinkfd = netlink_kernel_create(&init_net,NETLINK_TEST,0,kernel_recv_thread,NULL,THIS_MODULE);
if(!netlinkfd )
return -1;
else {
printk(KERN_ERR"[kernel space] create netlink successfuly!\n");
return 0;
}
}
void netlink_release(void)
{
printk(KERN_DEBUG"[kernel space] echo_netlink_exit!\n");
if(netlinkfd != NULL)
sock_release(netlinkfd->sk_socket);
}
void stop_kthread(void)
{
int i;
printk(KERN_ERR"[kernel space] stop kthread!\n");
for(i=0; i != pid_index; i++) {
if(task_test[i] != NULL) {
kthread_stop(task_test[i]);
task_test[i] = NULL;
}
}
}
void init_client(void)
{
int i = 0;
for(i=0; i<MAX_PID_COUNT; i++) {
client_netlink[i].pid = 0;
task_test[i] = NULL;
}
}
/**
* NAME: init_echo_module
*
* DESCRIPTION:
* 模組載入函式
* @*psdhdr
* @*addr
* @size
*
* RETURN:
*/
int __init init_echo_module(void)
{
int result = 0;
init_client();
result = init_char_device();
if ( result<0 ) {
printk(KERN_ERR"[kernel space] cannot create a netlinksocket!\n");
return result;
}
result = init_netlink();
if ( result<0 ) {
printk(KERN_ERR"[kernel space] cannot create a netlinksocket!\n");
return result;
}
return result;
}
/**
* NAME: exit_echo_module
*
* DESCRIPTION:
* 模組解除安裝函式
* @*psdhdr
* @*addr
* @size
*
* RETURN:
*/
void __exit exit_echo_module(void)
{
netlink_release();
stop_kthread();
delete_device();
}
module_init(init_echo_module);
module_exit(exit_echo_module);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zhang");
MODULE_VERSION("V1.0");
#####################使用者態檔案操作原始碼####################
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <linux/fs.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <signal.h>
#include <sys/ioctl.h>
#define MAX_SIZE 1024
char buf[MAX_SIZE]; //緩衝區
char *dir = "/dev/echodev";
int fd = 0;
static void stop(int sign)
{
printf("Catch a signal\n");
close(fd);
exit(0);
}
int main()
{
int arg = 0;
int cmd = 0;
int ret = 0;
int len = 0;
/*開啟裝置檔案*/
fd = open(dir, O_RDWR | O_NONBLOCK);
if(fd == -1) {
printf("open failure: %s\n",dir);
close(fd);
return -1;
}
signal(SIGINT, stop);
signal(SIGTSTP, stop);
char opt[50];
while(1){
printf("please input operation (read/ioctl): ");
scanf("%s",opt);
if(0 == strcmp(opt,"read")) {
/* 讀取資料 */
len = read(fd, buf, sizeof(buf));
printf(": %d\n", len);
} else if(0 == strcmp(opt,"ioctl")) {
printf("select 0(A-a)/1(a-A): ");
while(scanf("%d",&cmd) != EOF) {
ret = ioctl(fd,cmd,&arg);
if (ret<0)
continue;
else
break;
}
}else {
printf("input error!\n");
continue;
}
}
/* 關閉裝置 */
close(fd);
return 0;
}
linux核心模組具體載入流程,詳見:
linux核心模組Makefile編寫格式,詳見:
gcc的Makefile編寫格式,詳見: