
【深度相機系列五】腦補了和庫克的對話後,我發現了iPhone X深度相機選擇的祕訣和方法
阿新 • • 發佈:2019-02-07
本文首發於微信公眾號:計算機視覺life
前面的文章分別介紹了三種深度相機的原理:TOF、RGB雙目、結構光。看起來它們都各有利弊,那麼在實際產品研發中如何選擇深度相機呢?
為了讀者能夠有個清晰的思路,我腦補了蘋果公司CEO蒂姆·庫克(Tim Cook)和我的一段對話,我們就iPhone X如何選擇深度相機深入交換了意見。

以下對話內容純屬虛構,如有雷同,肯定是抄我的。 -------------------------------------------------------------------------------------------------- Cook:Hi,sixgod,how are you? 
 庫克:嗯,這個點明白了。我們繼續討論吧。
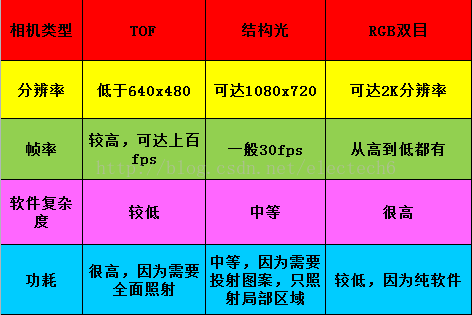
我:我:別急,看下面的表格,我列出了對比結果。
庫克:嗯,這個點明白了。我們繼續討論吧。
我:我:別急,看下面的表格,我列出了對比結果。

庫克:嗯,知道了。我們手機必須全天候實現三維人臉識別,RGB雙目方案做不到,不考慮了。那還有兩種呢,怎麼選?
我:下面可以從解析度、幀率、軟體複雜度、功耗等方面來考慮吧。畢竟我們要用在移動裝置上。
庫克:OK。我們計劃推出基於人臉的很多實用有趣的應用,比如人臉表情,人像光照,背景虛化等。攻城獅們正在努力加班中。後期可能還會推出AR相關的應用。所以對深度圖解析度還是有較高的要求的。
我:啊?你們也加班啊。。。關於解析度,TOF方案深度圖解析度很難提高,一般都達不到VGA(640x480)解析度。比如Kinect2的TOF方案深度圖解析度只有512x424。而Google和聯想合作的PHAB2手機的後置TOF深度相機解析度只有224x171。TOF方案受物理器件的限制,解析度很難做到接近VGA的,即使做到,也會和功耗呈指數倍增長。
庫克:那結構光的解析度呢?
我:在較近使用範圍內,結構光方案的解析度會大大高於TOF方案。比如目前結構光方案的深度圖最高可以做到1080p左右的解析度了。
庫克:嗯,這個解析度夠用了。那幀率和軟體複雜度呢?我們要實現實時的應用,這點也很重要!
我:幀率的話,TOF方案可以達到非常高的幀率,差不多上百fps吧。結構光方案幀率會低點,典型的是30fps,不過這也基本夠用了。軟體複雜度方面,結構光因為需要對編碼的結構光進行解碼,所以複雜度要比直接測距的TOF高一些。
庫克:嗯,看起來,幀率和軟體複雜度方面TOF更有優勢,不過差別對我們的需求影響不太明顯,我們無所不能的演算法工程師應該可以搞定。那功率呢?三維人臉解鎖使用頻率很高,功率是一個非常重要的考慮因素。
我:確實是啊,我之前用的iphone5s每天都得充電,出遠門都得自帶充電寶,心累啊。
庫克:額。。。
我:扯遠了啊。功耗的話TOF是鐳射全面照射,而結構光是隻照射其中區域性區域,比如PrimeSense的偽隨機散斑圖案,只覆蓋了不到十分之一的空間。另外,TOF發射的是高頻調製脈衝,而結構光投射圖案並不需要高頻調製,所以結構光的功耗要比TOF低很多。還是以偽隨機散斑結構光為例,結構光方案功耗只有TOF的十分之一不到吧。
庫克:Amazing! 有沒有具體的對比表格?
我:有有有。下面是三種方案在解析度,幀率,軟體複雜度和功耗方面的對比結果。
庫克:嗯,看來我只能選擇結構光方案了。其實,結構光方案還有一個優勢在於技術成熟,我們收購的PrimeSense很早就把結構光技術用在kinect一代產品中了。既然技術這麼成熟,想必結構光技術也有很多變種吧。
我:沒錯!目前結構光技術有如下幾種:一種是單目IR+投影紅外點陣,另外一種是雙目IR+投影紅外點陣,這樣相當於結構光+雙目立體融合了,深度測量效果會比前者好一些,比如Intel RealSense R200採用的就是雙目IR+投影紅外點陣,不足之處就是體積較大。而單目IR+投影紅外點陣的方案雖然體積較小,但是效果會差一點。
庫克:等下,體積是重點考慮因素啊!手機上空間本身就非常有限,消費者現在對全面屏也非常著迷。看來只能選擇單目IR+投影紅外點陣的方案了。我們前置深度相機的空間非常狹小,即使這樣設計出來,看起來很可能像是女生的齊劉海。
我:那挺萌的啊!
庫克:額。。。你繼續說說計算複雜度。
我:嗯,計算方式也分幾種:一是直接用ASIC(專用積體電路)進行計算,成本稍微高一點,但是處理速度快,支援高幀率和高解析度深度相機,關鍵是比通用晶片功耗低。二是DSP+軟體演算法,成本跟用ASIC差不多,但支援不了高幀率高解析度,功耗比ASIC稍高。三是直接用手機的AP(Application Processor)進行純軟體計算,這個不需要額外增加硬體成本,但是比較消耗AP的計算資源。同樣也不支援高幀率高解析度,功耗比較大。

庫克:低功耗,計算速度快,高幀率高解析度,嗯,ASIC方案比較適合iPhone X。
我:那您總結一下最後iPhone X的深度相機技術方案?
庫克:嗯。我們最終選擇方案是:結構光原理的深度相機。具體來說是:單目IR+投影紅外點陣+ASIC方案。該方案在深度解析度、深度測量精度上有較大優勢,實時性處理和全天候工作也都有保障,功耗也相對較低,就是成本稍高了一些。
我:額,這麼說,iPhone X的定價會比較高了?
庫克:還好吧,不過是幾杯咖啡的錢。
--------------------------------------------------------------------------------------------------------
我猛地從夢中驚醒,出了一身冷汗。手裡攥著還沒來得及泡的泡麵,已被我捏的咔咔作響,那分明是心臟被震碎一地聲音。我掐指算了算,嗯,只要再堅持吃半年泡麵,我就能攢夠買iPhone X的錢了。
以下對話內容純屬虛構,如有雷同,肯定是抄我的。 -------------------------------------------------------------------------------------------------- Cook:Hi,sixgod,how are you?