
半全域性立體匹配方法調研,以及一些立體匹配方向的思考
寫大論文的時候看到了這篇文章,感嘆到作者科研的創新
《A Non-Local Cost Aggregation Method for Stereo Matching》
一種非區域性代價聚合立體匹配方法
對於基於區域性資訊的立體匹配,採用的一般都是滑動視窗,作者創造性的提出使用最小生成樹並結合其性質完成了全域性代價聚合的值傳遞工作,效果很好,而且有程式碼實現:
Paper:
Code:
介紹文章1:
介紹文章2:
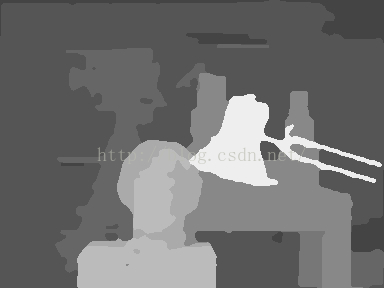
效果還不錯:整體上完全達到了全域性優化演算法的水平,而且演算法在時間上基本能夠滿足實時性的要求,如果通過分析程式碼效能加以優化,或者引入平行計算的演算法,實時計算不是沒有可能。後續準備詳細分析改良一下這個演算法,作為一個創新點好好學習一下。
改進的文章:根據本文開頭文章的思想進行了改進
Segment-Tree based Cost Aggregation for Stereo Matching
基本思路是分割後每一塊作為一個最小生成樹,類似分層的最小生成樹,其實就是減少MST中的節點數目。
文章分析:
當初研究圖割演算法,跟著思路一路看文章過來,從影象分割開始看起,漸漸的看到立體匹配這塊,開始一直做立體匹配的相關內容,後來發現看文章實在看的太少了。而且高檔次的文章看的更少,以至於停留在非常低端已經很成熟的方法的改進中不能自拔,現在要畢業了才想起看文章去寫國內外的研究背景,卻突然給我了很多idea,但是時間確實有限,希望剛接觸這個的同行們從這些人的成果中多少有點啟示,我提兩點趨勢:
1.演算法的並行性,立體匹配好的演算法不一定要求多高的精度,我認為實時性是最重要的,例如工業控制,和無人駕駛汽車,機器人導航對實時性的要求。
2.組合的演算法(綜合起來的工程性演算法),立體匹配作為一個已經應用在實際工業領域的研究問題,是一個複雜的工業或者說工程問題,是自成體系的問題,沒有一個複雜的的演算法能夠一蹴而就的解決問題,需要從頭到尾多個演算法的組合。
甚至不誇張的說,從源頭的攝像機矯正開始下功夫,直到最後面的交叉檢驗視差求精,每一個環節將誤差和計算量降低到最少,各個環節的改進都能為整體流程做貢獻,而這些正是我們做工程的魅力所在,一點一滴精益求精。
3.創新性,立體匹配上進行創新,需要在立體匹配的整個過程和應用場景上下功夫,比如特定目標的立體匹配。對目標影象進行目標檢測後的行人立體匹配等,我認為都可以作為一個研究思路,將演算法組合起來,完成一個特定的需求,而這本身就偏應用了。