
C/C++ BMP(24位真彩色)影象處理(3)------影象の放大縮小(雙線性插值)
影象的放大縮小其實是一回事,都是先建立一張空白目標影象(放大縮小後的影象),其大小就是想要放大縮小後所得到的影象大小。建立影象後我們並不知道這張影象裡面的各個畫素點RGB(或灰度)值是多少,這個時候就需要經過一個演算法去算目標影象的畫素點RGB(或灰度)值。基本上所有相關的演算法都是通過算出目標影象的畫素跟原影象的畫素的對映關係來實現的,但是不同的演算法由於這個對映關係的求取不同,處理效率和處理效果會有所差異。本文介紹的是比較常用到的雙線性插值演算法,並通過C/C++ BMP(24位真彩色)影象處理這一系列所用到的基本框架來實現。
關於雙線性插值演算法的原理,由下圖解釋:
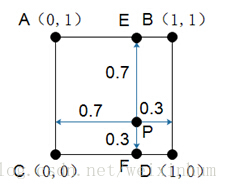
如上面所言,我們需要算出目標影象畫素跟原影象畫素的對映關係,我們從遍歷目標影象畫素點開始,對每一個畫素點進行比例計算,算出其如果投影到原影象應該是處於原影象的哪個位置,通常所得到的結果正如上圖的所示,求得的點P處於原影象的四個真實畫素點中。我們假定原影象畫素點間的RGB(或灰度)值是呈線性變化的,則我們可以通過A、B兩點RGB(或灰度)值算出AB線段上面的E點的RGB(或灰度)值,同理亦可算出F點的RGB(或灰度)值。得到了E、F兩點的RGB(或灰度)值後可經由相同的方法得到P點的RGB(或灰度)值。到此,我們就知道該如何通過對映關係去求得目標影象的RGB(或灰度)值了。
我們把點A、B、C、D、E、F、P的RGB(或灰度)值分別記為FA、FB、FC、FD、FE、FF、FP(注意由於RGB是三個值,這個記法其實不嚴謹,可以理解為是FA等是RGB的其中一個值,然後另外兩個也可同理得到),則有FE=(1-0.7)*FA+(1-0.3)*FB,FF=(1-0.7)*FC+(1-0.3)*FD,可得FP=(1-0.7)*FE+(1-0.3)*FF=0.3*0.3*FA+0.3*0.7*FB+0.7*0.3*FC+0.7*0.7*FD。
到此計算公式推導完畢,可以著手寫程式碼了,由於我們分析的時候是用一般的情況(點P落在原影象四個畫素點中),如果點P剛好落在原影象的最右端或最下端時,需要做特殊的處理。主要實現程式碼如下:
#define MYDRAW_HEIGHT 600 //目標影象高度
#define MYDRAW_WIDTH 800 //目標影象/*******************影象處理部分******************/ /*******************雙線性插值******************/ for (int hnum = 0; hnum < MYDRAW_HEIGHT; hnum++) for (int wnum = 0; wnum < MYDRAW_WIDTH; wnum++) { double d_original_img_hnum = hnum*height / (double)MYDRAW_HEIGHT; double d_original_img_wnum = wnum*width / (double)MYDRAW_WIDTH; int i_original_img_hnum = d_original_img_hnum; int i_original_img_wnum = d_original_img_wnum; double distance_to_a_x = d_original_img_wnum - i_original_img_wnum;//在原影象中與a點的水平距離 double distance_to_a_y = d_original_img_hnum - i_original_img_hnum;//在原影象中與a點的垂直距離 int original_point_a = i_original_img_hnum*l_width + i_original_img_wnum * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點A int original_point_b = i_original_img_hnum*l_width + (i_original_img_wnum + 1) * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點B int original_point_c = (i_original_img_hnum + 1)*l_width + i_original_img_wnum * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點C int original_point_d = (i_original_img_hnum + 1)*l_width + (i_original_img_wnum + 1) * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點D if (i_original_img_hnum + 1== MYDRAW_HEIGHT - 1) { original_point_c = original_point_a; original_point_d = original_point_b; } if (i_original_img_wnum + 1== MYDRAW_WIDTH - 1) { original_point_b = original_point_a; original_point_d = original_point_c; } int pixel_point = hnum*write_width + wnum * 3;//對映尺度變換影象陣列位置偏移量 pColorDataMid[pixel_point] = pColorData[original_point_a] * (1 - distance_to_a_x)*(1 - distance_to_a_y) + pColorData[original_point_b] * distance_to_a_x*(1 - distance_to_a_y) + pColorData[original_point_c] * distance_to_a_y*(1 - distance_to_a_x) + pColorData[original_point_c] * distance_to_a_y*distance_to_a_x; pColorDataMid[pixel_point + 1] = pColorData[original_point_a + 1] * (1 - distance_to_a_x)*(1 - distance_to_a_y) + pColorData[original_point_b + 1] * distance_to_a_x*(1 - distance_to_a_y) + pColorData[original_point_c + 1] * distance_to_a_y*(1 - distance_to_a_x) + pColorData[original_point_c + 1] * distance_to_a_y*distance_to_a_x; pColorDataMid[pixel_point + 2] = pColorData[original_point_a + 2] * (1 - distance_to_a_x)*(1 - distance_to_a_y) + pColorData[original_point_b + 2] * distance_to_a_x*(1 - distance_to_a_y) + pColorData[original_point_c + 2] * distance_to_a_y*(1 - distance_to_a_x) + pColorData[original_point_c + 2] * distance_to_a_y*distance_to_a_x; } /*******************雙線性插值******************/ /*******************影象處理部分******************/
處理結果如下:

原影象

縮小後圖像

放大後圖像
整個工程程式碼如下:
#include <string.h>
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <malloc.h>
#include<time.h>//時間相關標頭檔案,可用其中函式計算影象處理速度
#define WIDTHBYTES(bits) (((bits)+31)/32*4)//用於使影象寬度所佔位元組數為4byte的倍數
#define MYDRAW_HEIGHT 1080 //目標影象高度
#define MYDRAW_WIDTH 1920 //目標影象寬度
typedef unsigned char BYTE;
typedef unsigned short WORD;
typedef unsigned long DWORD;
typedef long LONG;
//點陣圖檔案頭資訊結構定義
//其中不包含檔案型別資訊(由於結構體的記憶體結構決定,要是加了的話將不能正確讀取檔案資訊)
typedef struct tagBITMAPFILEHEADER {
DWORD bfSize; //檔案大小
WORD bfReserved1; //保留字,不考慮
WORD bfReserved2; //保留字,同上
DWORD bfOffBits; //實際點陣圖資料的偏移位元組數,即前三個部分長度之和
} BITMAPFILEHEADER;
//資訊頭BITMAPINFOHEADER,也是一個結構,其定義如下:
typedef struct tagBITMAPINFOHEADER {
//public:
DWORD biSize; //指定此結構體的長度,為40
LONG biWidth; //點陣圖寬
LONG biHeight; //點陣圖高
WORD biPlanes; //平面數,為1
WORD biBitCount; //採用顏色位數,可以是1,2,4,8,16,24,新的可以是32
DWORD biCompression; //壓縮方式,可以是0,1,2,其中0表示不壓縮
DWORD biSizeImage; //實際點陣圖資料佔用的位元組數
LONG biXPelsPerMeter; //X方向解析度
LONG biYPelsPerMeter; //Y方向解析度
DWORD biClrUsed; //使用的顏色數,如果為0,則表示預設值(2^顏色位數)
DWORD biClrImportant; //重要顏色數,如果為0,則表示所有顏色都是重要的
} BITMAPINFOHEADER;
void main()
{
long now = 0;
now = clock();//儲存影象處理開始時間
BITMAPFILEHEADER bitHead, writebitHead;
BITMAPINFOHEADER bitInfoHead, writebitInfoHead;
FILE* pfile;//輸入檔案
FILE* wfile;//輸出檔案
char strFile[50] = "demo.bmp";//開啟影象路徑,BMP影象必須為24位真彩色格式
char strFilesave[50] = "16.bmp";//處理後圖像儲存路徑
fopen_s(&pfile, strFile, "rb");//檔案開啟影象
fopen_s(&wfile, strFilesave, "wb");//開啟檔案為儲存修改後影象做準備
//讀取點陣圖檔案頭資訊
WORD fileType;
fread(&fileType, 1, sizeof(WORD), pfile);
fwrite(&fileType, 1, sizeof(WORD), wfile);
if (fileType != 0x4d42)
{
printf("file is not .bmp file!");
return;
}
//讀取點陣圖檔案頭資訊
fread(&bitHead, 1, sizeof(tagBITMAPFILEHEADER), pfile);
writebitHead = bitHead;//由於擷取影象頭和原始檔頭相似,所以先將原始檔頭資料賦予擷取檔案頭
//讀取點陣圖資訊頭資訊
fread(&bitInfoHead, 1, sizeof(BITMAPINFOHEADER), pfile);
writebitInfoHead = bitInfoHead;//同位圖檔案頭相似
writebitInfoHead.biHeight = MYDRAW_HEIGHT;//為擷取檔案重寫點陣圖高度
writebitInfoHead.biWidth = MYDRAW_WIDTH;//為擷取檔案重寫點陣圖寬度
int mywritewidth = WIDTHBYTES(writebitInfoHead.biWidth*writebitInfoHead.biBitCount);//BMP影象實際點陣圖資料區的寬度為4byte的倍數,在此計算實際資料區寬度
writebitInfoHead.biSizeImage = mywritewidth*writebitInfoHead.biHeight;//計算點陣圖實際資料區大小
writebitHead.bfSize = 54 + writebitInfoHead.biSizeImage;//點陣圖檔案頭大小為點陣圖資料區大小加上54byte
fwrite(&writebitHead, 1, sizeof(tagBITMAPFILEHEADER), wfile);//寫回點陣圖檔案頭資訊到輸出檔案
fwrite(&writebitInfoHead, 1, sizeof(BITMAPINFOHEADER), wfile);//寫回點陣圖資訊頭資訊到輸出檔案
int width = bitInfoHead.biWidth;
int height = bitInfoHead.biHeight;
//分配記憶體空間把源圖存入記憶體
int l_width = WIDTHBYTES(width*bitInfoHead.biBitCount);//計算點陣圖的實際寬度並確保它為4byte的倍數
int write_width = WIDTHBYTES(writebitInfoHead.biWidth*writebitInfoHead.biBitCount);//計算寫點陣圖的實際寬度並確保它為4byte的倍數
BYTE *pColorData = (BYTE *)malloc(height*l_width);//開闢記憶體空間儲存影象資料
memset(pColorData, 0, height*l_width);
BYTE *pColorDataMid = (BYTE *)malloc(mywritewidth*MYDRAW_HEIGHT);//開闢記憶體空間儲存影象處理之後資料
memset(pColorDataMid, 0, mywritewidth*MYDRAW_HEIGHT);
long nData = height*l_width;
long write_nData = mywritewidth*MYDRAW_HEIGHT;//擷取的點陣圖資料區長度定義
//把點陣圖資料資訊讀到數組裡
fread(pColorData, 1, nData, pfile);//影象處理可通過操作這部分資料加以實現
/*******************影象處理部分******************/
/*******************雙線性插值******************/
for (int hnum = 0; hnum < MYDRAW_HEIGHT; hnum++)
for (int wnum = 0; wnum < MYDRAW_WIDTH; wnum++)
{
double d_original_img_hnum = hnum*height / (double)MYDRAW_HEIGHT;
double d_original_img_wnum = wnum*width / (double)MYDRAW_WIDTH;
int i_original_img_hnum = d_original_img_hnum;
int i_original_img_wnum = d_original_img_wnum;
double distance_to_a_x = d_original_img_wnum - i_original_img_wnum;//在原影象中與a點的水平距離
double distance_to_a_y = d_original_img_hnum - i_original_img_hnum;//在原影象中與a點的垂直距離
int original_point_a = i_original_img_hnum*l_width + i_original_img_wnum * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點A
int original_point_b = i_original_img_hnum*l_width + (i_original_img_wnum + 1) * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點B
int original_point_c = (i_original_img_hnum + 1)*l_width + i_original_img_wnum * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點C
int original_point_d = (i_original_img_hnum + 1)*l_width + (i_original_img_wnum + 1) * 3;//陣列位置偏移量,對應於影象的各畫素點RGB的起點,相當於點D
if (i_original_img_hnum +1== MYDRAW_HEIGHT - 1)
{
original_point_c = original_point_a;
original_point_d = original_point_b;
}
if (i_original_img_wnum +1== MYDRAW_WIDTH - 1)
{
original_point_b = original_point_a;
original_point_d = original_point_c;
}
int pixel_point = hnum*write_width + wnum * 3;//對映尺度變換影象陣列位置偏移量
pColorDataMid[pixel_point] =
pColorData[original_point_a] * (1 - distance_to_a_x)*(1 - distance_to_a_y) +
pColorData[original_point_b] * distance_to_a_x*(1 - distance_to_a_y) +
pColorData[original_point_c] * distance_to_a_y*(1 - distance_to_a_x) +
pColorData[original_point_c] * distance_to_a_y*distance_to_a_x;
pColorDataMid[pixel_point + 1] =
pColorData[original_point_a + 1] * (1 - distance_to_a_x)*(1 - distance_to_a_y) +
pColorData[original_point_b + 1] * distance_to_a_x*(1 - distance_to_a_y) +
pColorData[original_point_c + 1] * distance_to_a_y*(1 - distance_to_a_x) +
pColorData[original_point_c + 1] * distance_to_a_y*distance_to_a_x;
pColorDataMid[pixel_point + 2] =
pColorData[original_point_a + 2] * (1 - distance_to_a_x)*(1 - distance_to_a_y) +
pColorData[original_point_b + 2] * distance_to_a_x*(1 - distance_to_a_y) +
pColorData[original_point_c + 2] * distance_to_a_y*(1 - distance_to_a_x) +
pColorData[original_point_c + 2] * distance_to_a_y*distance_to_a_x;
}
/*******************雙線性插值******************/
/*******************影象處理部分******************/
fwrite(pColorDataMid, 1, write_nData, wfile); //將處理完影象資料區寫回檔案
fclose(pfile);
fclose(wfile);
printf("影象處理完成\n");
printf("執行時間為:%dms\n", int(((double)(clock() - now)) / CLOCKS_PER_SEC * 1000));//輸出影象處理花費時間資訊
}