
選擇 NS3 作為無線感測器網路模擬器的理由(NS3 for WSN)
阿新 • • 發佈:2019-02-10
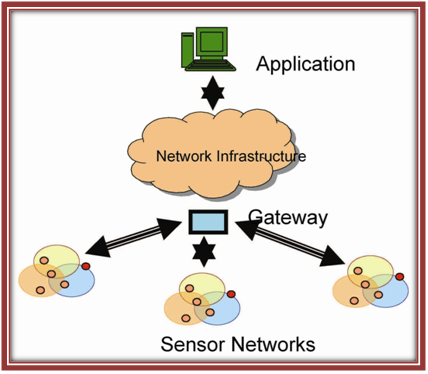
無線感測器網路(Wireless Sensor Network,WSN)是由節點集合組織而成的協同網路。每個節點都有處理能力、可能包含多種記憶體、有一個射頻收發器、有一個電源並能適應各種感測器和執行器。ns3 WSN 系統包含一個提供無線連線到有線世界和分散式節點的閘道器。無線協議的選擇依賴於你應用的要求。
無線感測器網路的應用(application):
- 資產追蹤(Asset tracking)
- 週期性測量(Periodic measurements)
- 環境保護與空氣、水土的監測(Environmental and monitoring of air, water and soil)
- 事件檢測(Event detection)
- 過程監控(Process monitoring)
- 工控機監控(Industrial machine monitoring)
- 建築和橋樑的結構監測(Structural monitoring for buildings and bridges)
無線感測器網路節點的元件:
- 感測器介面
- 無線電
- 類比電路
- 電池
- 微控制器
引入無線感測器網路的需求:
- 生產成本
- 容錯性
- 安全性
- 生命週期
- 可測量性
- 實時性
無線感測器網路的構架:
WSN 示例程式碼:
double DegreesToRadians (double degrees)
{
return degrees * M_PI / 180.0