
ROS環境下機器人建模(XACRO)及常見問題解決
阿新 • • 發佈:2019-02-13
在ROS環境下進行機器人建模最常用的方法就是使用URDF檔案對機器人進行描述,URDF檔案形成通常有三種途徑:
1.直接使用URDF的XML tag進行檔案編寫。
2.使用XACRO建模後轉換成URDF檔案(更簡潔靈活,利於程式複用)。
3.使用三維軟體Solidworks進行三維繪圖後使用SW2URDF外掛轉換成URDF檔案(外掛對不同的SW相容性不好,不易安裝成功)。
本次建模使用上述的第二種方法。模型為一個四自由度機械手,具體的建模程式如下:
-------------------------------------------------------分割線---------------------------------------
<?xml version="1.0"?> <robot name="dobot_arm" xmlns:xacro="http://www.ros.org/wiki/xacro"> <!-- Include materials --> <material name="Black"> <color rgba="0.0 0.0 0.0 1.0"/> </material> <material name="Red"> <color rgba="0.8 0.0 0.0 1.0"/> </material> <material name="White"> <color rgba="1.0 1.0 1.0 1.0"/> </material> <!-- Constants --> <property name="deg_to_rad" value="0.01745329251994329577"/> <property name="M_PI" value="3.14159"/> <property name="x" value="0.0125"/> <!-- base link properties --> <property name="base_len" value="0.168" /> <property name="base_width" value="0.168" /> <property name="base_height" value="0.055" /> <!-- shoulder link properties --> <property name="shoulder_radius" value="0.06" /> <property name="shoulder_len" value="0.085" /> <!-- bigarm link properties --> <property name="bigarm_radius" value="0.03" /> <property name="bigarm_len" value="0.135" /> <!-- forearm link properties --> <property name="forearm_radius" value="0.03" /> <property name="forearm_len" value="0.147" /> <!-- chuck link properties --> <property name="chuck_len" value="0.08" /> <property name="chuck_width" value="0.03" /> <property name="chuck_height" value="0.03" /> <!-- inertial matrix macro definition --> <xacro:macro name="inertial_matrix" params="mass"> <inertial> <mass value="${mass}" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="0.5" iyz="0.0" izz="1.0" /> </inertial> </xacro:macro> <!-- transmission block macro definition --> <xacro:macro name="transmission_block" params="joint_name"> <transmission name="tran1"> <type>transmission_interface/SimpleTransmission</type> <joint name="${joint_name}"> <hardwareInterface>PositionJointInterface</hardwareInterface> </joint> <actuator name="motor1"> <hardwareInterface>PositionJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> </xacro:macro> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <virtual_joint name="fixed_frame" type="fixed" parent_frame="base_link" child_link="base_link" /> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!-- BASE LINK --> <link name="base_link"> <visual> <origin xyz="0 0 0.0275" rpy="0 0 0" /> <geometry> <box size="${base_len} ${base_width} ${base_height}" /> </geometry> <material name="White" /> </visual> <collision> <origin xyz="0 0 0.0275" rpy="0 0 0" /> <geometry> <box size="${base_len} ${base_width} ${base_height}" /> </geometry> </collision>> <xacro:inertial_matrix mass="1"/> </link> <gazebo reference="base_link"> <material>Gazebo/White</material> </gazebo> <joint name="shoulder_joint" type="revolute"> <parent link="base_link"/> <child link="shoulder_link"/> <origin xyz="0 0 0.055" rpy="0 0 0" /> <axis xyz="0 0 1" /> <limit effort="300" velocity="1" lower="-2.35619449" upper="2.35619449"/> <dynamics damping="50" friction="1"/> </joint> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!-- SHOULDER LINK --> <link name="shoulder_link" > <visual> <origin xyz="0 0 0.0425" rpy="0 0 0" /> <geometry> <cylinder radius="${shoulder_radius}" length="${shoulder_len}"/> </geometry> <material name="Red" /> </visual> <collision> <origin xyz="0 0 0.0425" rpy="0 0 0" /> <geometry> <cylinder radius="${shoulder_radius}" length="${shoulder_len}"/> </geometry> </collision> <xacro:inertial_matrix mass="1"/> </link> <gazebo reference="shoulder_link"> <material>Gazebo/Red</material> </gazebo> <joint name="bigarm_joint" type="revolute"> <parent link="shoulder_link"/> <child link="bigarm_link"/> <origin xyz="0 0 0.085" rpy="0 0 0" /> <axis xyz="0 1 0" /> <limit effort="300" velocity="1" lower="0.0" upper="1.483529864195" /> <dynamics damping="50" friction="1"/> </joint> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!-- BIGARM LINK --> <link name="bigarm_link" > <visual> <origin xyz="0 0 0.0675" rpy="0 0 0" /> <geometry> <cylinder radius="${bigarm_radius}" length="${bigarm_len}"/> </geometry> <material name="White" /> </visual> <collision> <origin xyz="0 0 0.0675" rpy="0 0 0" /> <geometry> <cylinder radius="${bigarm_radius}" length="${bigarm_len}"/> </geometry> </collision> <xacro:inertial_matrix mass="1"/> </link> <gazebo reference="bigarm_link"> <material>Gazebo/White</material> </gazebo> <joint name="forearm_joint" type="revolute"> <parent link="bigarm_link"/> <child link="forearm_link"/> <origin xyz="0 0 0.135" rpy="0 0 0" /> <axis xyz="0 1 0" /> <limit effort="300" velocity="1" lower="-0.1745329251994329577" upper="1.65806278939" /> <dynamics damping="50" friction="1"/> </joint> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!--FOREARM LINK --> <link name="forearm_link" > <visual> <origin xyz="0 0 0.0735" rpy="0 0 0" /> <geometry> <cylinder radius="${forearm_radius}" length="${forearm_len}"/> </geometry> <material name="Black" /> </visual> <collision> <origin xyz="0 0 0.0735" rpy="0 0 0" /> <geometry> <cylinder radius="${forearm_radius}" length="${forearm_len}"/> </geometry> </collision> <xacro:inertial_matrix mass="1"/> </link> <gazebo reference="forearm_link"> <material>Gazebo/Black</material> </gazebo> <joint name="chuck_joint" type="revolute"> <parent link="forearm_link"/> <child link="chuck_link"/> <origin xyz="0 0 0.147" rpy="0 0 0" /> <axis xyz="0 1 0" /> <limit effort="300" velocity="1" lower="-1.5707963267948966" upper="1.5707963267948966" /> <dynamics damping="50" friction="1"/> </joint> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!--FOREARM LINK --> <link name="chuck_link" > <visual> <origin xyz="0.02 0 0.0155" rpy="0 0 0" /> <geometry> <box size="${chuck_len} ${chuck_width} ${chuck_height}" /> </geometry> <material name="Red" /> </visual> <collision> <origin xyz="0 0 0.0155" rpy="0 0 0" /> <geometry> <box size="${chuck_len} ${chuck_width} ${chuck_height}" /> </geometry> </collision> <xacro:inertial_matrix mass="1"/> </link> <gazebo reference="chuck_link"> <material>Gazebo/Red</material> </gazebo> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!-- Transmissions for ROS Control --> <xacro:transmission_block joint_name="shoulder_joint"/> <xacro:transmission_block joint_name="bigarm_joint"/> <xacro:transmission_block joint_name="forearm_joint"/> <xacro:transmission_block joint_name="chuck_joint"/> <!-- ///////////////////////////////////////////////////////////////////////////////////////////////////////////////////// --> <!-- ros_control plugin --> <gazebo> <plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"> <robotNamespace>/dobot_arm</robotNamespace> </plugin> </gazebo> </robot>
-------------------------------------------------------分割線------------------------------------------------------
建模完成後使用launch檔案在RViz外掛下檢視自己的模型,launch檔案的使用請參考相關部落格,此處不展開。
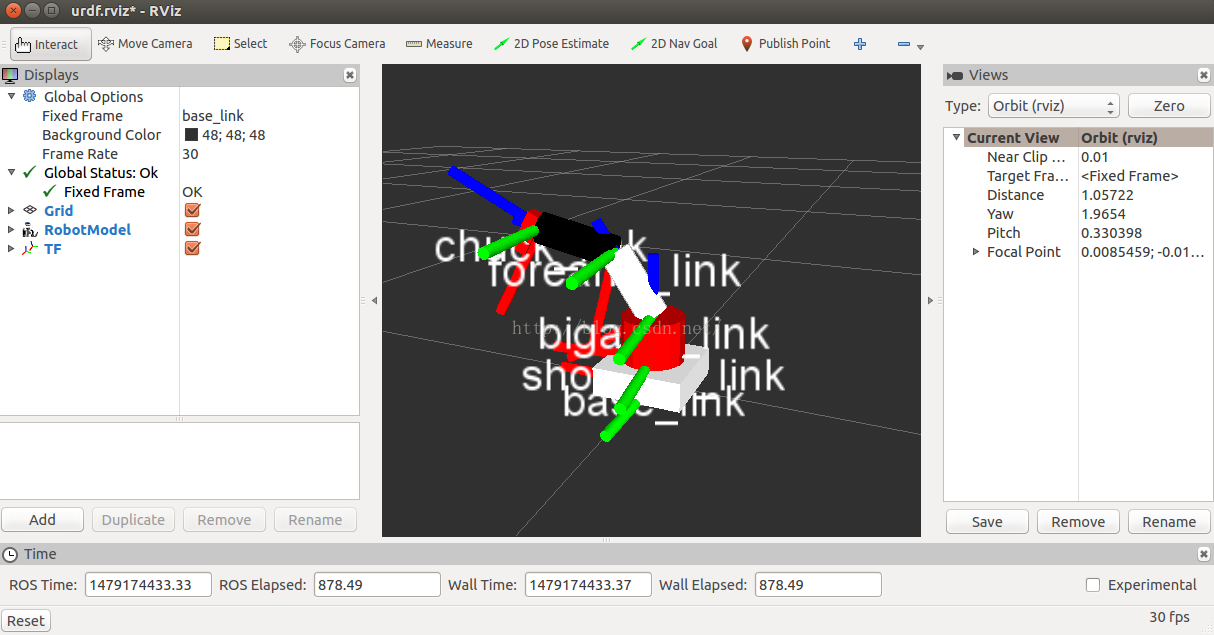
在檢視模型時容易遇到的一個問題是RVIZ顯示如下錯誤:
No tf data. Actual error: Fixed Frame [map] does not exist......
解決辦法就是在固定的第一個LINK上增加一個虛擬額Joint,使其父LINK和子LINK都是同一個(上面的程式已經加入),例如:
<virtual_jointname="fixed_frame"type="fixed"parent_frame="base_link"child_link="base_link"/>這樣就不會有無法定位初始座標的問題了。