在Mac上使用Dronekit與SITL做飛行程式的模擬除錯
背景
無人機的專案快要中期答辯了,為了在地面站(電腦)控制無人機,我們選擇DroneKit來進行程式碼的書寫。DroneKit是一個專門用於控制無人機的Python庫,使用這個API我們可以更方便的使用MAVLink來給無人機發送指令。
在我的Mac上面,我使用parallels虛擬機器裝載Windows 10和Ubuntu。因為SITL是在Linux下開發的,並且我們將使用樹莓派作為機載電腦,所以Ubuntu上面安裝的是SITL、MAVProxy和DroneKit。為了方便編輯程式碼,我在Ubuntu和macOS上都裝了Python。Windows系統只用於載入視覺化的地面站MissionPlanner。
步驟
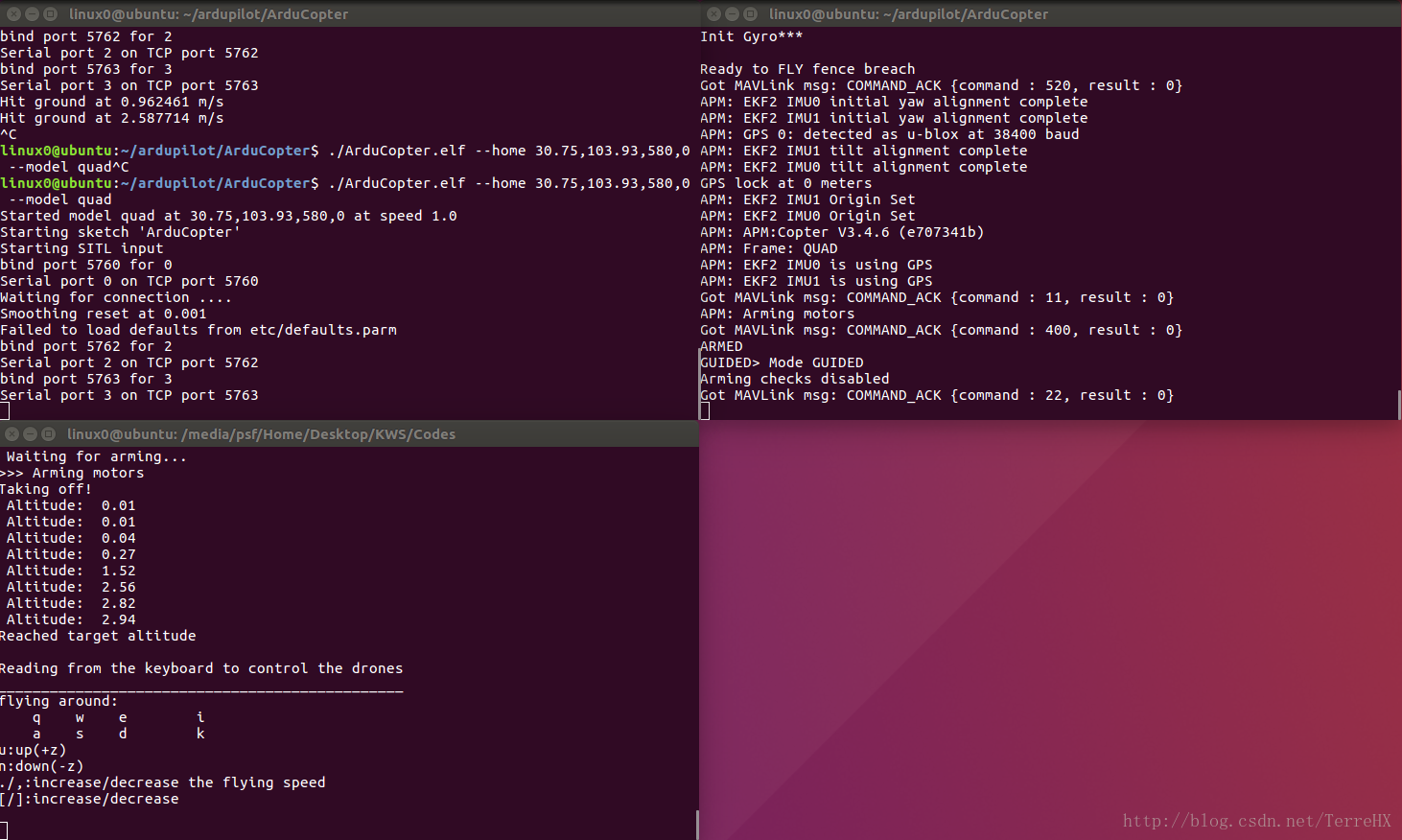
執行SITL和MAVProxy:開啟Ubuntu,按住control+option+t,新建一個終端,輸入:
cd ~/ardupilot/ArduCopter/ ./ArduCopter.elf --home 30.75,103.93,580,0 --model quadhome後面的引數分別是模擬機出生時的(緯度,經度,海拔,朝向),因為是四旋翼所以model為quad。
再新建一個終端,輸入:
mavproxy.py --master tcp:127.0.0.1:5760 --sitl 127.0.0.1:5501 --out 127.0.0.1:14551 --out 10.211.55.6:14550這裡面有兩個out介面,第一個127.0.0.1:14551是Ubuntu的內部地址,這個地址將用作程式碼介面,第二個10.211.55.6:14550是Windows的IP地址。要檢視Windows的IP地址,開啟Windows,新建一個cmd視窗,輸入:
ipconfig找到對應的IPv4地址填入上方相應位置即可。
開啟Windows中的MissionPlanner,右上角連線方式選擇UDP,點選connect連線,埠填寫14550。這裡的埠和上述第二個介面的埠保持一致。
這個時候模擬器和地面站都已經準備好了,就等待程式的運行了。
示例程式
#!/usr/bin/env python 儲存該示例程式為test.py,到相應目錄。
測試程式
在SITL和MAVProxy正在執行、MissionPlanner連線正常的情況下,在Ubuntu中新建一個終端,cd到示例程式所在的目錄,輸入:
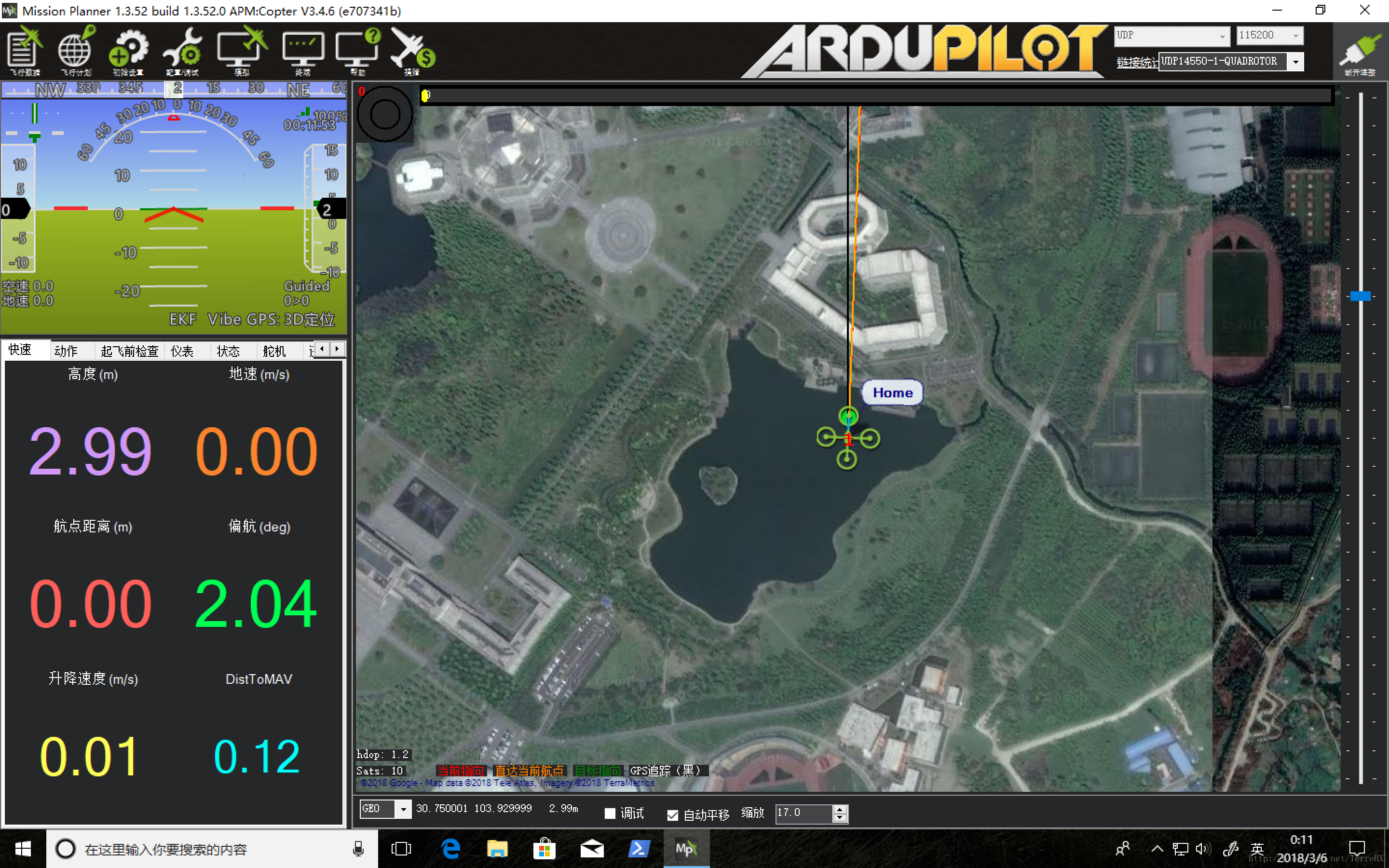
python test.py執行後,可以看到MAVProxy終端返回的各種資料,MisssionPlanner中則可以更直觀的觀察飛機的軌跡、航向等等。
自家程式的效果圖: