
camera 概念&& camer 知識錦集
http://blog.csdn.net/suwenqiang_2011/article/details/8843208
百度知道給出的答案
最簡單的說法:快門速度影響曝光 曝光受快門速度和光圈大小的影響,通俗說法中的曝光時間跟快門速度是一樣的,所以才會產生你這個疑問,但是正式的說法沒有曝光時間這個說法,應該說是曝光量而不是曝光時間。 如果你一定要說曝光時間的話,就要拋開光圈的影響。你可以這樣理解,當光圈相同的情況下,快門速度快則曝光時間短,快門速度慢,則曝光時間長。比如:光圈在F2.8的時候,千分之一秒的快門速度比百分之一秒的快門速度,所產生的曝光時間短。 下面說一下曝光量: 你也知道相機其實就是用底片(膠捲相機)或者CCD(數碼相機)把光線的投影儲存起來,所以在底片或者CCD上儲存的光線的量影響相片的明暗,要是儲存的光線很少就偏暗,如果儲存的光線很多就偏亮。而這個光線的量不多不少就可以說曝光正常,偏多就是曝光過量,偏少就是欠曝。 而相機就是通過快門和光圈控制這個曝光的量。借用別人的比喻說說,這個照相機就像一個水龍頭,水量的大小就相當於曝光量,你可以通過開關一定時間和調節水管的口徑大小控制水量的大小,而這個水龍頭的開關就相當於相機快門的速度,口徑就相當於相機光圈。在你相同口徑的時候,開的時間越長水量越大;在你開的時間相同的情況下,水管的口徑越大水量就越大。 綜上所述(-_-! 跟寫論文一樣),曝光量由快門速度和光圈大小同時決定。所以說僅說曝光時間不合適,應該說曝光量。
http://blog.csdn.net/suwenqiang_2011/article/details/8834121
最近在研究camera的驅動,經常會看到camera IC輸出格式為RGB,YUV/YCrCb,我非常不明白的一個概念就是YUV和YCrCb到底有什麼區別?或者說他們是否是同一個概念,只是別名不同而已,因此我在網上搜索了很久,終於得到了一個比較滿意的答案。
問題1:什麼是YUV?問題2:YUV,YCbCr4 YUV (4:2:2)與YCbCr4:2:2格式是否是一會事?問題3:支援ITU601的YCbCr4:2:2格式與普通的YCbCr4:2:2格式有什麼區別? 答 1:詳細介紹一下YUV在YUV中,“Y”代表明亮度(Luminance或Luma),也就是灰階值;而“U”和“V”表示的則是色度(Chrominance或Chroma),作用是描述影像色彩及飽和度,用於指定畫素的顏色。“亮度”是通過RGB輸入訊號來建立的,方法是將RGB訊號的特定部分疊加到一起。“色度”則定義了顏色的兩個方面——色調與飽和度,分別用Cr和Cb來表示。其中,Cr反映了RGB輸入訊號紅色部分與RGB訊號亮度值之間的差異,而Cb反映的是RGB輸入訊號藍色部分與RGB訊號亮度值之間的差異,此即所謂的色差訊號,也就是我們常說的分量訊號(Y、R-Y、B-Y)。
在專業領域了,“Y CB CR”表示數字色差訊號而不是模擬色差訊號。色差訊號Y,R-Y,B-Y訊號一般通稱為Y, Cr,Cb; 習慣上Y,Cr,Cb為數字(PCM)的色差訊號,模擬的色差訊號則稱Y,Pr,Pb,所以我們常在DVD Player的內部看到Y,Cr,Cb而在DVD Player的外部看到色差輸出標示為Y,Pr,Pb或YUV
“習慣上Y,Cr,Cb為數字(PCM)的色差訊號,模擬的色差訊號則稱Y,Pr,Pb,所以我們常在DVD Player的內部看到Y,Cr,Cb而在DVD Player的外部看到色差輸出標示為Y,Pr,Pb或YUV;”
實際上可能一樣:
“YUV則是在歐洲電視系統PAL中的色差訊號的通稱,包含數字及模擬的色差訊號都稱YUV,所以當您看到YUV時您就要聯想到它是PAL系統中的Y,R-Y,B-Y訊號,它可能是數字(PCM)的YUV,也可能是模擬的YUV。” 答 3:YUV 和 Y,Cr,Cb對於數位電路而言:YUV 和 Y,Cr,Cb只是相差128,YUV沒有負值,Y,Cr,Cb最高位為符號位,U = Cr + 128;V = Cb +128. 參見iru bt656 or ccir 656
Bayer是相機內部的原始圖片, 一般字尾名為.raw. 很多軟體都可以檢視, 比如PS.
我們相機拍照下來儲存在儲存卡上的.jpeg或其它格式的圖片, 都是從.raw格式轉化
過來的. .raw格式內部的儲存方式有多種, 但不管如何, 都是前兩行的排列不同. 其
格式可能如下:
G R G R G R G R
B G B G B G B G
G R G R G R G R
B G B G B G B G
橫為2的倍數, 豎為4的倍數, 它們構成了解析度. 如, 上面則代表了 8 * 4 解析度的
Bayer圖.
我們要知道的是, G = 2 * R 及 G = 2 * B, 即綠色值為紅色值或藍色值的兩倍, 因
為人眼對綠色更敏感, 所以綠色的分量更重.
下面說一下從bayer轉換成rgb圖的演算法, RGB圖, 即為三色圖, 一個畫素點就由RGB
三種顏色構成的混合色, 而bayer圖一個畫素就只有一個顏色, 或R或G或B. 因為bayer
一個畫素點只有一種顏色, 需要藉助這個畫素點周圍的顏色對它進行插值(填充)另外的
兩種顏色, 它本身的顏色就不用插了. 一般的演算法是:
對於插入R和B,
Rx = ( R1 + R2 ) / 2; 或-------------取上邊和下邊的平均值, 或是左邊和右邊的平均值
Rx = ( R1 + R2 + R3 + R4 ) / 4;----取四個邊的平均值
B同理. 如:
G B G
R G R
G B G
對於中間的G, 它缺少 R和B, 用上下和左右的平均值進行求值.
對於
B G B
G R G
B G B
這個圖呢, 中間點R, 缺少G和B, G暫時沒討論, 那麼 B, 就是從R的四個B角進行求平均值.
==============================================
如果插入G, 稍有些複雜.
不過一般的演算法與R和B一樣, 複雜的演算法, 其複雜程度也提升一倍, 不過精度更高, 如果對於
視訊監測系統來說, 精度相對來說不必要求太高, 用R或B的解法即可. 下面說複雜的:
對於圖:
R1
G1
R4 G4 R G2 R2
G3
R3
對於中間點R, 它需要插入G和B, B不討論, 主要討論G, 它周圍有四個點G1, G2, G3, G4.
( G1 + G3 ) / 2--------------如果 |R1-R3| < |R2-R4|
G(R) = ( G2 + G4 ) / 2-------------如果 |R1-R3| > |R2-R4|
( G1 + G2 + G3 + G4 ) / 4--如果 |R1-R3| = |R2-R4|
如果周圍出現的畫素點顏色為B, 就應該比較|B1-B3|與|B2-B4|的值.
====================================================
還有關於將RGB格式轉換為YUV格式的演算法, 這裡不想討論了.
這裡要注意的是, bayer每個畫素的值是8位的. 但是有的相機的bayer格式卻有10位, 12位
以及14位, 16位的, 那麼如何將這些高於8位的資料轉換為8位資料呢?. 拿12位資料來說, 有的
人是取高8位或是低8位, 那麼這樣就會出現一個問題, 這張影象會有一個斜度, 不是偏亮就是偏
暗, 或是出現其它亂七八糟的問題, 顏色問題總是不能令人滿意. 這個時候就要去較正它, 無疑是
浪費了時間.
另一種演算法是使用log對映, 據老外說, 這種轉換法具有較高的精度. 拿12位來說, 一般轉換演算法:
f(in) = 2 ^ ( log(in) * 8 / 12 )
轉換圖為:
|8 .
| .
| .
|_______________________12
因為log256 = 8, log4096 = 12, 對了log是以2為底哦.
做得更好一點的演算法, 可能根據提供的曝光等其它因素不同, 而將演算法進行調整, 這樣當一些意外
事件發生時, 產生的圖片也不會失真嚴重.
如有何疑問, 請致信: [email protected]
1. 目標[52RD.com] 手機攝像頭模組用ISP功能模組的市場走向及研發方向。為能夠正確認識手機攝像模組行業提供技術及市場依據。[52RD.com] 2. ISP在模組上的應用原理[52RD.com] 2.1 功能區域[52RD.com] 無論數碼相機、攝像機或者攝像手機,其影像資料從前端感應後,皆須經過ASP(Analog Signal Processing)、ADC(Analog-Digital Converter)、前期影像處理(Pre-ISP)與後端影像處理(Post-ISP)四個階段後,影像資料才能最終呈現於終端裝置上(圖一)。

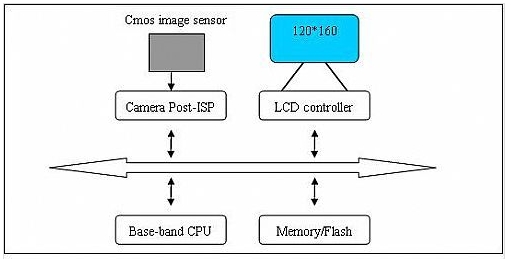
但由於影象感測器的畫素高低不同、及其他成本等的考慮,ISP各功能區域會依手機市場特性做分散配置或整合處理,例如,低端相機將Pre-ISP與感測器整合在一起,2.0M畫素手機將所有的ISP功能單獨做成一個晶片等。 [52RD.com] 2.1.1 ASP [52RD.com] ASP(Analog Signal Processor)主要是針對影象感測器採集的電壓或電流訊號進行處理,主要作用是訊號放大、自動曝光調整、時序控制、畫素抽樣控制等。因其與初始訊號 的絕對相關性,一般的影象感測器廠商皆會將此項功能直接與感測器做在一塊。在圖一中即為藍色部分。感測資料經過ASP處理後,輸出資料為Raw Data。 [52RD.com] 2.1.2 Pre-ISP [52RD.com] Pre-ISP(Image Signal Processor)為前端影像處理,主要針對ADC轉換後傳出的數字資料(Raw data),進行影像壞點修補、白平衡、gamma校正、銳利度、顏色插值等。在低畫素的產品中,例如0.3M畫素,因影像資料較少,不需要大規模的複雜 處理,會將Pre-ISP與影象感測器做在同一顆晶片中;但高畫素CMOS感測器,因需要處理的畫素數越來越多,雖然將Pre-ISP整合在sensor 內部從製造技術上來講不困難,但因成本及成像質量的原因,有些手機設計公司在設計時會將集成於sensor內部的Pre-ISP功能遮蔽掉,並維持感測器 ADC輸出的原始資料,交由單獨的ISP晶片或整合在Baseband的ISP進行處理。 [52RD.com] 由Pre-ISP處理完後的資料分為RGB和YUV,RGB為三原色,資料比YUV較大,可以方便後續處理單元(Post-ISP)做更為多元的變化;YUV為RGB三原色經內插法所得,資料量較小,但不利於後續的處理單元進行處理。 [52RD.com] 對於實力強的手機研發公司比較傾向於使用Raw data資料或者RGB資料,這樣可以根據自己的需要調整出更完美的畫面質量。Raw data資料也為以後高階市場的使用方向,但國內現階段2.0M畫素的模組應用還處於初級階段。因此還是以YUV輸出的為主。 [52RD.com] 2.1.3 Post-ISP [52RD.com] Post-ISP雖然也稱為後端影響處理,但其與成像相關的工作不多,主要負責資料壓縮與後端介面介面控制,以及資料傳輸、控制等工作,其中還包括LCD影像預覽、鏡頭對焦控制、使用介面等。[52RD.com] 2.2 ISP發展階段 [52RD.com] 2.2.1 第一階段 [52RD.com] 第一階段因畫素不高(CIF等級),因此其結構與一般手機相差不多, Pre-ISP功能與影象感測器整合,而Post-ISP則依賴手機基帶晶片,顯示屏則經由系統提供,其結構如下 [52RD.com] [52RD.com] 圖二 手機攝像模組後端晶片第一階段原理圖 [52RD.com] 2.2.2 第二階段 [52RD.com] 隨著畫素增加(CIF至VGA),為維持後端手機基帶晶片的通訊功能,開始將原來負責的JPEG壓縮、資料流的協調處理等功能獨立成單一晶片完成,而影像處理Pre-ISP則交由手機設計公司自行決定,分整合到影象感測器內部和與Post-ISP整合兩種。 [52RD.com] 此階段方案已被淘汰,VGA畫素的Post-ISP功能已可被Baseband整合。
圖三 手機攝像模組後端晶片第二階段原理圖[52RD.com] 2.2.3 第三階段[52RD.com] 此時畫素已由VGA轉為百萬畫素,高畫素的Pre-ISP,因所需的儲存器及電源需求過大,在當時的技術條件下,sensor端已無法全部處理,因此將 Pre-ISP與Post-ISP整合成完整的ISP。另因為對顯示螢幕的處理要求更高,此階段也將顯示器控制功能一併整合,以減少baseband的處 理負擔,其結構見圖四。

圖四手機攝像模組後端晶片第三階段原理圖 [52RD.com] 2.2.4 第四階段 [52RD.com] Main Panel [52RD.com] (240*320) [52RD.com] [52RD.com] 隨畫素增加到2.0M及以上,廠商將更多的功能例如MP3、3D sound processor、audio processor等亦整合進單獨的ISP晶片,此時稱之為MMP(Mobile Multimedia Processor),
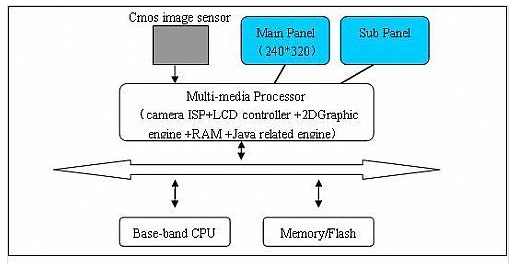
圖五手機攝像模組後端晶片第四階段原理圖 [52RD.com] 表一 手機攝像模組後端晶片發展趨勢 [52RD.com] 階段搭配畫素趨勢專案 [52RD.com] 第一階段CIFl 結構與一般手機相差無異 [52RD.com] l Pre-ISP功能可與影象感測器整合 [52RD.com] l Post-ISP依靠手機基帶晶片 [52RD.com] 第二階段VGAl Post-ISP獨立成單一晶片 [52RD.com] l Pre-ISP或由sensor整合或與Post-ISP整合 [52RD.com] 第三階段Megal 影象感測器無法全部處理Pre-ISP,與Post-ISP整合成單獨的ISP晶片 [52RD.com] 第四階段2Mega及以上l 單獨的MMP(ISP)晶片整合更多的功能,以迎合2.5G及3G的發展[52RD.com] [52RD.com] 3. 現階段ISP的主要應用方案 [52RD.com] 表二 現階段ISP的主要應用方案 [52RD.com] 畫素輸出格式ISP或手機設計方案備註 [52RD.com] VGAYUV/RGB/ [52RD.com] Raw datal Sensor整合Pre-ISP; [52RD.com] l Baseband整合Post-ISP。OV是VGA的首選sensor廠家,其主流產品:OV7660/OV7663/OV7670皆整合Pre-ISP,而MTK則將Post-ISP部分整合進Baseband。 [52RD.com] l Baseband未整合Post-ISP; [52RD.com] l ISP(Pre-ISP&Post-ISP)功能被集成於MMP中;有一定比例的Baseband廠商(例如英飛凌)未將Post-ISP整合進Baseband。而是採用MMP的方式來處理。 [52RD.com] 2.0Mega及以上YUV/RGBl Sensor中整合Pre-ISP; [52RD.com] l ISP(Pre- ISP&Post-ISP)功能被集成於MMP中。Baseband不參與影象處理手機設計公司可以採用sensor輸出的YUV或RGB,或者 直接將Pre-ISP遮蔽掉,所有影象處理工作由MMP晶片來做。(理論上來講,MMP處理效果應該好一點,實際上有時因除錯工程師水平的原因,無法完全 發揮MMP的潛力。) [52RD.com] Raw datal Sensor中不整合Pre-ISP; [52RD.com] l ISP(Pre-ISP & Post-ISP)功能被集成於MMP中。Baseband不參與影象處理所有影象處理工作由MMP晶片來做。 [52RD.com] [52RD.com] 將來的趨勢,因成本的原因,基帶晶片會整合所有的影象處理功能。 [52RD.com] 4. 評價 [52RD.com] l 從 成本來講,ISP與Sensor之間的關係是背離整合的。將ISP整合在sensor上的成本比ISP整合在MMP或baseband上要高很多。隨著傳 感器解析度的提高,越來越多的感測器將只整合輸出數字訊號所必需的電路,而將影象處理及壓縮等功能集成於MMP或Baseband中。[52RD.com] l 從成像質量來看,發展的趨勢也是背離整合,在MMP中整合功能強大的影象處理功能,而且此趨勢隨解析度的提高會愈加明顯。[52RD.com] l 上面兩個評價是發展趨勢,但現在的市場情況各種應用方案都存在,且沒有明顯的強弱之分。MTK SoC方案在低端VGA產品中佔主導,並且有大批的擁護者,但現仍有大批平臺公司仍然沒有走基帶整合之路。且高階產品中,從我的瞭解中還沒有將ISP功能 整合進Baseband中的,大部分仍然採用MMP方案。但有資料表明,將ISP功能整合進Baseband中製造成本幾乎可以忽略不計,此方案較之 MMP方案仍然有成本空間。基帶產品和應用處理器領域的大玩家都期待在它們的晶片上增加ISP功能。[52RD.com] l 無論如何,不管是當前的低端市場情況,還是將來的高階產品,獨立的ISP(MMP)晶片都有較大的市場空間。真正的高畫素SoC基帶方案的時代到來還有很長的路要走。
攝像頭的資料輸出格式一般分為CCIR601、CCIR656、RAW RGB等格式,此處說的RGB格式應該就是CCIR601或CCIR656格式。而RAW RGB格式與一般的RGB格式是有區別的。
我們知道,Sensor的感光原理是通過一個一個的感光點對光進行取樣和量化,但,在Sensor中,每一個感光點只能感光RGB中的一種顏色。所以,通常所說的30萬畫素或130萬畫素等,指的是有30萬或130萬個感光點。每一個感光點只能感光一種顏色。
但是,要還原一個真正影象,需要每一個點都有RGB三種顏色,所以,對於CCIR601或656的格式,在Sensor模組的內部會有一個ISP模組,會將Sensor採集到的資料進行插值和特效處理,例如:如果一個感光點感應的顏色是R,那麼,ISP模組就會根據這個感光點周圍的G、B感光點的數值來計算出此點的G、B值,那麼,這一點的RGB值就被還原了,然後在編碼成601或656的格式傳送給Host。 而RAW RGB格式的Sensor則是將沒個感光點感應到的RGB數值直接傳送給Host,由Host來進行插值和特效處理。
修正:
不對吧,我覺得還是根據周圍GB點的感應值,來推算出此位置的GB值。可能sensor可以支援例如演算法來修正R值:根據周圍R值來綜合得出此點的R值。得出此位置畫素的RGB數值。
Raw RGB 每個畫素只有一種顏色(R、G、B中的一種); RGB 每個畫素都有三種顏色,每一個的值在0~255之間; 在手機攝像頭的測試過程中,由sensor輸出的資料就是Raw data(Raw RGB),經過彩色插值就變成RGB
也不一定就是測試過程,想要獲得真正的影象,都必須有的一個過程; sensor輸出的資料格式,主要分兩種:YUV(比較流行),RGB,這就是sonsor的資料輸出;這其中的GRB就是Raw RGB,是sensor的bayer陣列獲取的資料(每種感測器獲得對應的顏色亮度); 但是輸出的資料不等於就是影象的實際資料,模組測試時,就要寫一個軟體,完成資料採集(獲得Raw data)->彩色插值(目的是獲得RGB格式,便於影象顯示)->影象顯示; 這樣就可以發現整個模組是否正常,有無壞點,髒點的等,檢測出不良品;(軟體的處理過程當中,為了獲得更好的影象質量,還需要白平衡,gamma校正,彩色校正) 而在手機的應用中,手機根據相機模組的資料格式,提供一個ISP(主要用於RGB格式的),配合軟體,使照相功能得到應用;
http://blog.csdn.net/shunzi610747304/article/details/7788241
1:camera 快門
什麼是快門:相機鏡頭前阻擋光線進入的裝置,它是相機上控制感光片有效曝光時間的一種裝置。
主要有兩種型別: 1. 鏡間快門(葉片快門) 2. 焦平面快門
快門時滯時間
相機在不使用對焦鎖定功能同時保證在自動對焦工作狀態下,從按下快門釋放按鈕到開始曝光的這段時間稱為快門時滯時間。
快門先決曝光模式
由我們先自行決定快門速度後,相機測光系統依當時光線的情形,自動選擇適當的光圈f值(可為無段式的f值)以配合。設有曝光模式轉盤的數碼相機,通常都會在轉盤上刻上’s’字母來代表快門先決模式。快門先決模式適合於需要控制快門的攝影。利用高速快門可凝結動作,利用慢速快門可令行駛中的車輛變成光束。
快門延遲
相機按下快門,這時相機自動對焦、測光、計算曝光量、選擇合適曝光組合…進行資料計算和儲存處理所需要的時間稱為快門延遲。
camera 快門用英語為(shutter)
曝光即是按下快門時相機感光元件受到光線的照射產生物理化學反應並以此記錄光線資訊的過程。要正確曝光,先得測光,現在數碼相機都是自動測光系統,所以你不用擔心曝光不準確。在開啟相機,進入拍攝介面時,相機就已經開始自動測光了。完全手動設定曝光的是M檔,你現在可以先不用它。還有有半自動檔:只設置光圈與快門速度其中一個,相機會根據機內的測光系統自動給出另一個適當的值。另外就是AUTO全自動檔,根據機內系統的測光結果,完全由相機自主決定所有引數的設定。另外“曝光補償”這個功能可以用於調節入光量,相當於微調。往“+”調節即增加入光量,照片比正常稍亮,反之則降低入光量,照片稍暗。以肉眼觀察,照片過暗或過亮,喪失需要拍攝的細節,就稱欠曝和過曝,現在也有相關軟體可以自動檢測照片中的過曝與欠曝區域。
數碼相機的影像感測器是不可更換的,為了得到不同的感光度,它需要在訊號的A/D轉換時變換訊號增益(Gain)。如果光線暗,就需要提高感光度即加大增益,這會降低信噪比,也就是增大了噪點。
相關推薦
camera 概念&& camer 知識錦集
http://blog.csdn.net/suwenqiang_2011/article/details/8843208 百度知道給出的答案 最簡單的說法:快門速度影響曝光 曝光受快門速度和光圈大小的影響,通俗說法中的曝光時間跟快門速度是一樣的,所以才會產生你這個疑
尋找效率源知識錦鯉|集萬千寵愛於一身,只寵你一人
這個冬天,錦鯉火啦! 有人承包你的吃喝玩樂 有人承包你的衣食住行 人人都盼望成為萬眾矚目的“幸運鵝” 可好運偏偏都是別人的 錦鯉可能會遲到,但絕對不會缺席 不如讓好運,與努力撞個滿懷 效率源感恩節寵粉活動躁起來~ 尋找效率源知識錦鯉 效率源知識錦鯉萬元
linux操作小技巧錦集
htm 請求 修改 live sshd 字符串 超時時間 用戶組 href 一、用戶及用戶組相關: cat /etc/group #查看用戶組,第3列就是組的一個ID的概念 cat /etc/shadow #查看用戶, cat /etc/passwd
【模擬賽題解錦集】——Hzoi
質數 spa else align can 11.2 == 問題 輔助 Day IXV: 題目鏈接 T1: 對於二者之一$n$,每次選取要麽變成$2n$,要麽是$n-(tot-n)=2*n-tot$,即最後結果為$n*2^{k}(\mod tot)
前端面試知識點錦集 JavaScript
處理 並且 tde log area 破壞 修改 bom javascrip 哪些地方會出現css阻塞,哪些地方會出現js阻塞? js的阻塞特性: 所有瀏覽器在下載JS的時候,會阻止一切其他活動,比如其他資源的下載,內容的呈現等等。直到JS下載、解析、
canvas煙花錦集
while -s flow ase contex ora wip pat group canvas可以實現不同動畫效果,本文主要記錄幾種不同節日煙花效果實現。 實現一 效果地址 html <canvas id="canvas"></
劍指offer解題思路錦集11-20題
難點 nbsp 因此 div sub AR 類型 lis 實現一個函數 又來更新劍指offer上的題目思路啦。 11、【二進制中1的個數】 題目:輸入一個整數,輸出該數二進制表示中1的個數。其中負數用補碼表示。 eg:NumberOf1(1)=1 NumberOf
java並發知識合集(前置知識——java內存模型)
以及 如何 老師 同時 mooc 完全 模型 狀態 image JMM規範: 一.概念:規範了java虛擬機與計算機內存如何協同工作,它規定了一個線程如何和何時可以看到其他線程修改過的共享變量的值,以及在必須時如何同步地訪問共享變量。 備註:如果兩個線程同時調用了同
java並發知識合集(序)
UC 們的 cpu 對象 常見 ring 時有 緩存 內存 一直想把學習的Java有關並發方面的知識做些記錄,分享給大家的同時有溫習的打算,今天剛申請的博客,就迫不及待的想寫出來,有什麽不對的地方,各位多多指教。 前置知識: 1.cpu高速緩存 2.
失敗是成功之母——錦集
現象 第一次 沒有 一次 我想 嘗試 經歷 做了 考試 多年前,我因為考試不及格而哭了,自覺寫下檢討。然後自然也是分數上來了。 如今,我覺得失敗是為了更好的成功。失敗與成功是等均的。沒有經歷失敗,就不會有成功。 這是一次數學考試(競賽),我想該做的已經做了。考試的時候思
Python - - MySQL資料庫 - - 操作錦集
注:環境配置資訊,系統環境CentOS 7.4,資料庫版本 mysql-5.7.24 1,跳過授權表 # 在命令列跳過授權表命令 mysqld_safe --skip-grant-tables & # 在 my.cnf 檔案配置跳過授權表命令 [mysqld] skip-grant-t
Python - - MySQL數據庫 - - 報錯錦集
aggregate state sql lec cat root navi using exec 註:環境配置信息,系統環境CentOS 7.4,數據庫版本 mysql-5.7.24 1,跳過授權表 # 在命令行跳過授權表命令 mysqld_safe --skip-gr
初始化引數(Initialization Parameter)知識合集 based on 11g
初始化引數檔案分為: 1)pfile 靜態引數檔案 2)spfile 動態伺服器引數檔案 作用:儲存建立例項、啟動後臺程序所需引數值。 呼叫:例項啟動時,按如下順序調取初始化引數檔案 linux: $ORACLE_HOME/dbs/spfile<SID>.ora $ORACLE
英語口語錦集(oralenglish)
1、1.I was teasing you.我只是在戲弄你。2.It's a long story.三言兩語說不清楚。 3.Stop talking to me.請別再說了。4. Don't be so silly. 別太傻了。5. You are
Android大廠面試題錦集(BAT TMD JD 小米)
1.android事件分發機制,請詳細說下整個流程 事件分發(面試).png 2.android view繪製機制和載入過程,請詳細說下整個流程 1.ViewRootImpl會呼叫performTraversals(),其內部會呼叫performMeasure()、perfor
甲基化問題錦集
甲基化問題錦集 【2017-02-18】 今天小編和大家聊聊甲基化。 問:什麼是表觀遺傳修飾? 答:基因組表觀遺傳修飾主要包括DNA甲基化修飾與核小體中組蛋白的修
單鏈表題錦集
1.刪除不帶頭節點的單鏈表L中所有值為x的結點 思路1:遞迴演算法 void Delete_X(Linklist &L,ElemType x){ LNode *p; if(!L) return NULL; if(L->data==x){
PHP開發錯誤錦集(持續更新)
1、trait 命名問題。 問題:trait 裡定義的方法找不到 <?php namespace app\controllers; trait Example { public function example(); } class Foo { use Exampl
考場沙雕錯誤錦集(大賽前必看,救命提分良藥)
記住,無論什麼測試,一定要先打三題暴力(至少不會被屠得太慘) 2018.10.4 1.記得算記憶體。(OI一年一場空,沒算記憶體見祖宗) 2018.10.6 1.在二分許多個字串時(二分長度),要以長度的最小值作二分右端點 (今日考場本該必A的題,因為我將右端點改成長度最大值
「 iOS知識小集 」2018 · 第 38 期
原文連結 更新:前兩週我們發了一條小集《Xcode 10.1 並沒有修復由於 Assets 引起的在 iOS 9 上的崩潰問題》,根據最新訊息,蘋果已經在伺服器端解決了這個問題,開發者通過 Xcode 10.1 打的 ipa 包在上傳到蘋果後臺,蘋果在處理包的過程中會自動修復。小夥伴們已親自驗證,不會