
在Virtualbox虛擬機器中配置使用ROS Spark機器人(Orbbec Astra 和 Xtion)
在虛擬機器中配置使用ROS Spark,在Virtualbox中使用USB外設包括Orbbec Astra 和 Xtion深度攝像頭和底盤。
虛擬機器使用外接裝置時,會遇到一些問題。不過隨著虛擬機器功能的逐漸完善,這些問題也得到了很大的改善。
1 需要在BIOS中設定開啟與虛擬機器相關的選項;
2 下載最新版本的虛擬機器並安裝增強功能;
Windows下系統裝置驅動可以不裝,無所謂的。
當然如果覺得在裝置管理器中有問號不爽可以裝一下。
上面步驟可以忽略!
需要在虛擬機器中將USB裝置啟用,如下所示,沒有看錯,只是這樣就可以了:
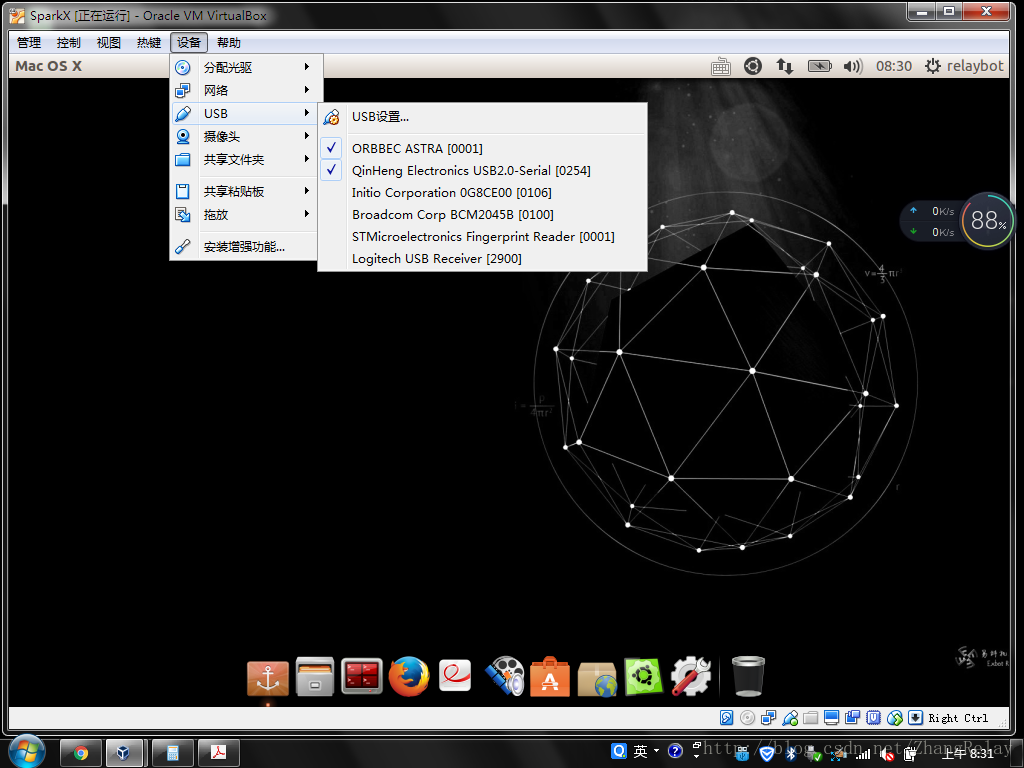
然後,就可以正常使用Spark了,現在虛擬機器支援大部分外設,包括USB3.0裝置,但是如果需要長期使用,推薦直接安裝,虛擬機器可作為入門學習用。
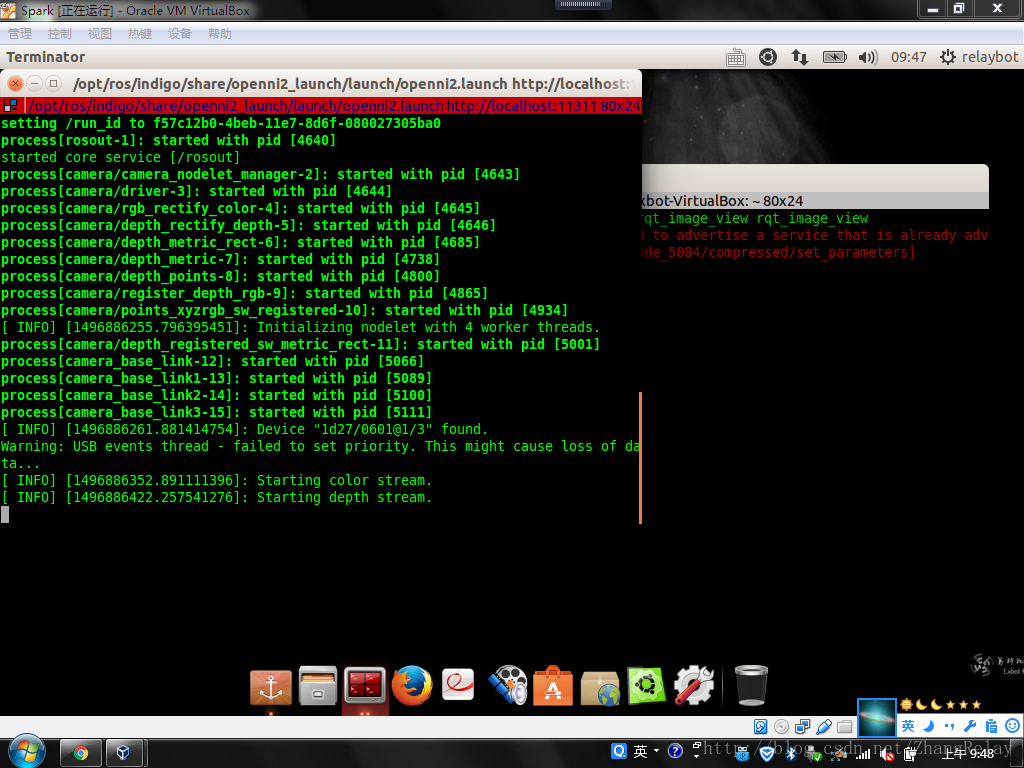
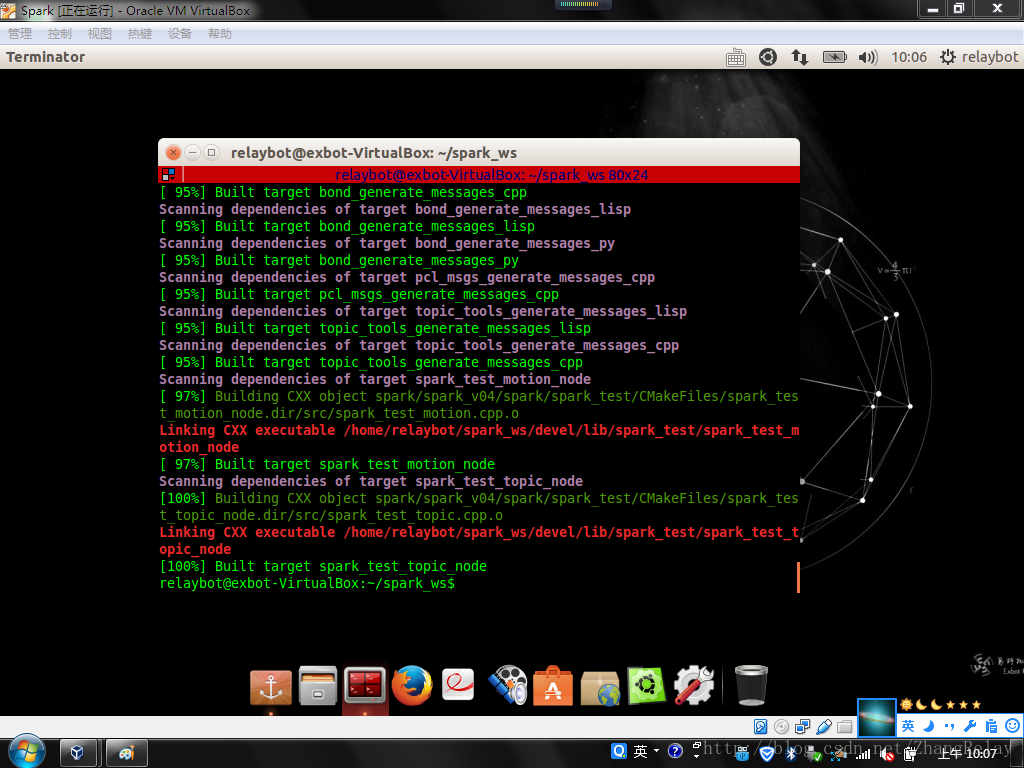
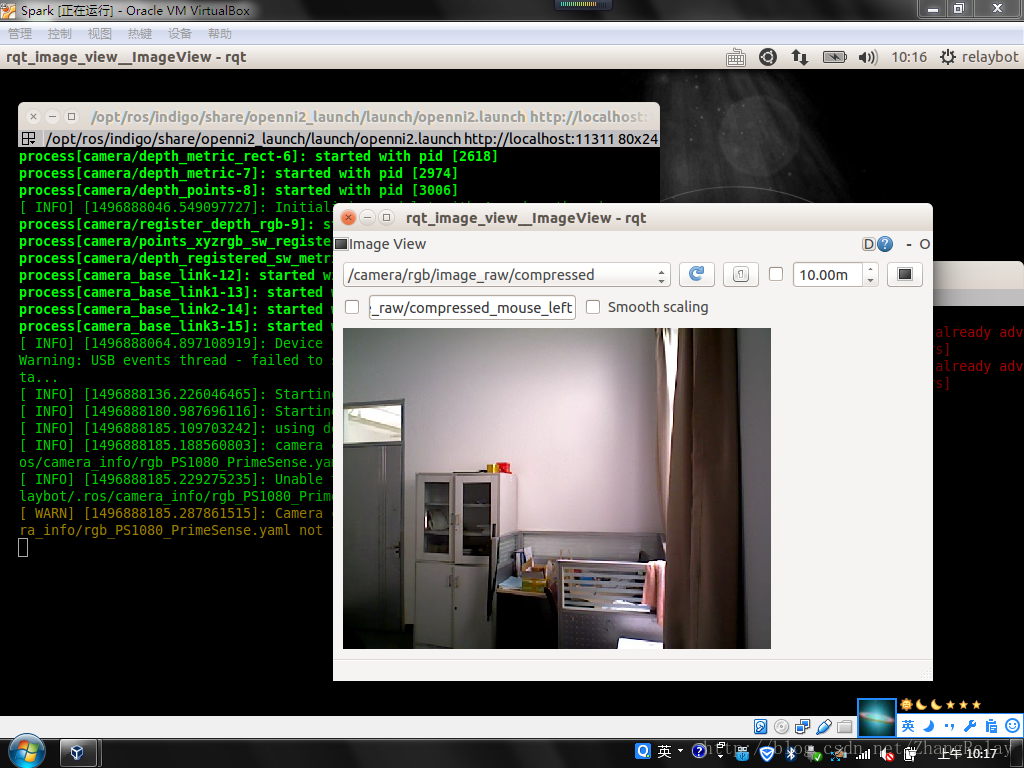
啟動./follow_run.sh小應用後,一切正常,完美使用:
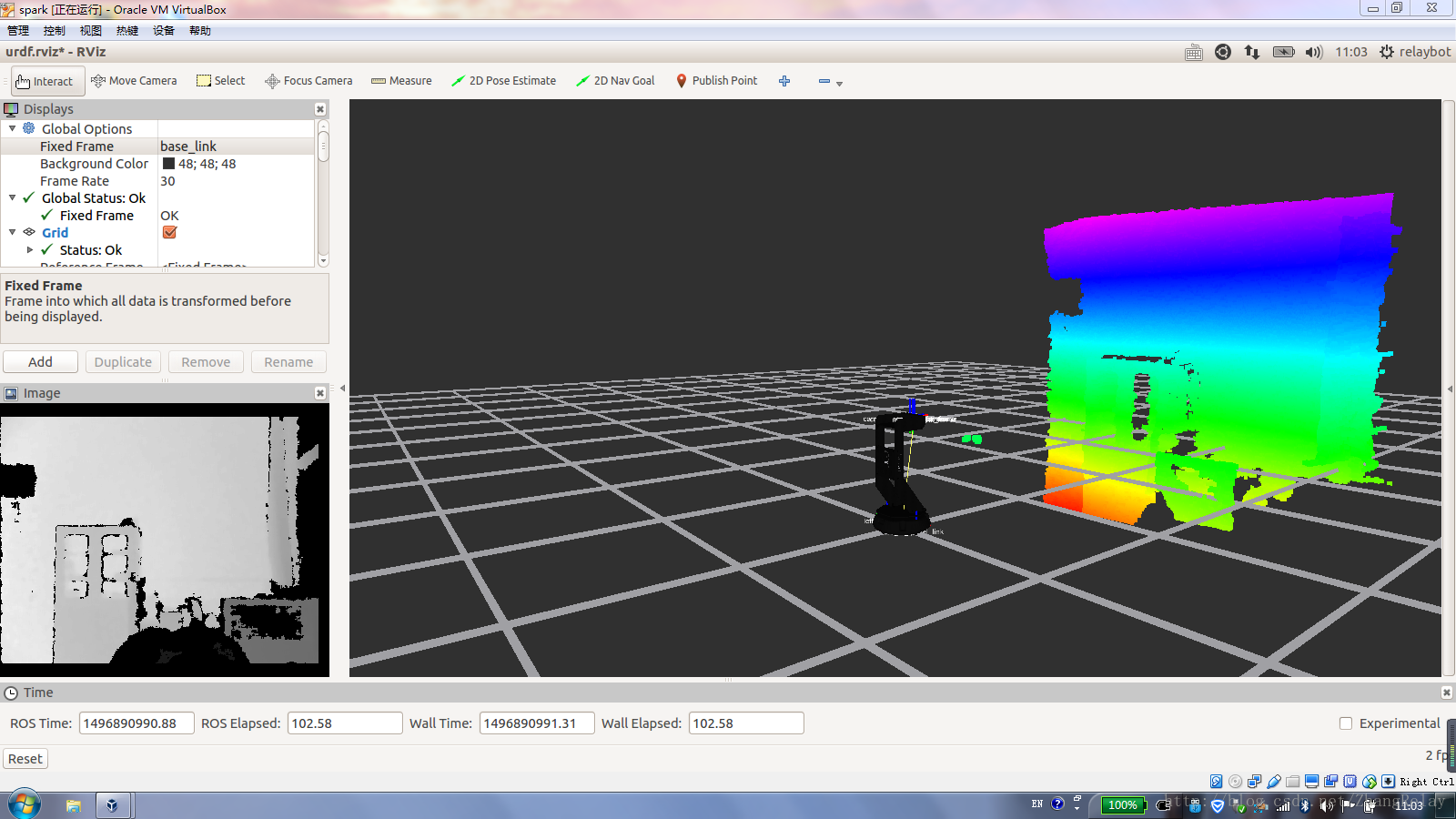

這樣就可以在虛擬機器中使用Spark,和直接安裝一樣進行使用和開發。
~End~
相關推薦
在Virtualbox虛擬機器中配置使用ROS Spark機器人(Orbbec Astra 和 Xtion)
在虛擬機器中配置使用ROS Spark,在Virtualbox中使用USB外設包括Orbbec Astra 和 Xtion深度攝像頭和底盤。虛擬機器使用外接裝置時,會遇到一些問題。不過隨著虛擬機器功能的
配置SecureCRT連線VirtualBox虛擬機器中的Linux環境
首先感謝作者提供,按步驟操作完成成功,這裡記下來 在實際的運維中我們常常使用SecuriteCRT來遠端控制Linux伺服器。下面將詳細介紹windows 7下通過VirtualBox搭建linux開發環境,並最終通過SecurityCRT來遠端訪問linux伺服器。
VirtualBox虛擬機器中手動啟用網絡卡配置網路
1.檢查是否存在網絡卡並且網絡卡是否啟用 dmesg | grep eth 在這個命令結果中同時可獲取網絡卡MAC值 獲取已經配置完成的連線 nmcli dev show 2.去網絡卡硬體資訊檔案中去檢視網絡卡是否掃描到配置中 /etc/udev/rules.d/70
在VirtualBox虛擬機器中安裝Windows Server 2012
下面有百度經驗的網址 https://jingyan.baidu.com/article/fdbd4277ace8e3b89f3f4867.html dvd映象檔案下載連結 ed2k://|file|cn_windows_server_2012_x64_dvd_915588.
virtualBox虛擬機器網路配置
複雜的網路 新增兩個網絡卡一個用於訪問外網,一個用來虛擬機器之間互相連線 1 建立虛擬機器時注意下網路設定 如下圖,新增兩個網絡卡,網絡卡一選擇網路地址轉換(nat),網絡卡而選擇 VirtualBox Host-Only Ethernet Adapter# 2 路由設定 兩個網絡卡不在一個網段,對應兩
在VirtualBox虛擬機器中執行ubuntu 常見問題彙總
環境準備 virtualbox(v5.0.8), 安裝好ubuntu(v15.10),及virtualbox增強安裝包(VBOXADDITIONS)。 Q1-ubuntu掛載vbox的host共享目錄 在host中建立共享目錄後,如何在安裝ubuntu
Windows虛擬機器中配置 域網路 遇到的問題
安裝64位時,提示“主機有虛擬化技術,但是此功能被禁用…(1)檢查BIOS設定裡啟用VT功能…”,此時需要重啟主機(非虛擬機器),進入BIOS,找到CPU相關項(一般在“高階”裡面),啟用CPU的虛擬
linux 虛擬機器中 配置IP 和主機名 永久生效
配置IPlinux虛擬機器下,修改IP後永久生效可以這樣: 在/etc/sysconfig/network-scripts 這個目錄下的ifcfg-eth0為第一個網絡卡,如果是第二個網絡卡則是ifcfg-eth1 在這裡進行配置即可,以下是命令 # vi /etc/sys
Linux虛擬機器中配置多節點MPI實現平行計算完整版
虛擬機器CentOS中配置MPI多節點平行計算完整版,這是一個新手教程,從一個空白的CentOS到能正常執行的基礎環境,儘量詳細寫了每個步驟 我的環境如下: 宿主機:Windows 10 Pro 虛擬機器:VMware 12 + CentOS 6.6 一、 虛擬機器網路配置
如何在虛擬機器中配置HTTP yum 源?
1. 如何配置HTTP yum 源? 寫配置步驟、及最後的配置結果,截圖,word文件 1)配置 apache http伺服器; 2)配置http yum 源,需要掛載在apache http伺服器上; ---------------------
VirtualBox虛擬機器中使用U盤等USB裝置的設定方法
http://www.hellonet8.com/618.html Under 好軟體&應用 | 十月 30th, 2011 | 被圍觀 59 次 | 沒有回覆 分享到:2 預設安裝完Virtualbox,新建系統後,插入U盤,實機可以使用,但是虛擬機器中
VirtualBox虛擬機器中安裝CentOS 7(二)對映SSH埠
CentOS 7在VirtualBox中安裝完成並啟用網路後,現在使用埠對映將22埠對映到本機22埠,方便使用ssh進行連線 1.開啟在虛擬機器的網路設定,點開高階--埠轉發 如下圖所示,加入一個SSH埠22的轉發,主機埠可以不和子系統埠相同(比如122): 在xShe
在VMWare的虛擬機器中設定共享資料夾(Linux-Ubuntu系統)
1、點選選單中的虛擬機器---設定---選項---共享資料夾,選擇總是開啟; 2、新增主機共享的資料夾; 3、安裝vmware tools: (1)開啟虛擬機器---安裝vmware tools; (2)進入系統後會有一個虛擬光碟機,右鍵——“在終端開啟” (
完整的從虛擬機器安裝到kali的安裝(詳細,必能上網)
下載虛擬機器 直接開啟軟體管家之類的東西或者上百度搜索vmware 網上很多說什麼破解版之類的,那都是騙人的,因為vmware是不用破解的,直接下載它的收費版本 下載完成之後安裝 開啟網路共享中心的更改介面卡設定,右鍵電腦右下角的網路連線符號,選擇開啟網路共享
虛擬機器安裝Ubuntu的上網設定(有線網路和無線網路)
虛擬機器下ubuntu共享方式上網: 一. 有線網路 在有線網路的條件下,vmware的安裝非常簡單,上網方式幾乎不用怎麼設定(預設NAT模式) 如果預設情況下不能上網,則按以下步驟嘗試: *********************************************
機器學習知識點查漏補缺(隨機森林和extraTrees)
efault 生成 xtra lac use sample strategy default lin 隨機森林 對數據樣本及特征隨機抽取,進行多個決策樹訓練,防止過擬合,提高泛化能力 一般隨機森林的特點: 1、有放回抽樣(所以生成每棵樹的時候,實際數據集會有重復),
VirtualBox 虛擬機器配置centos6.4 spark叢集(1)--- 環境搭建以及所遇問題
一、前言 最近學習spark,就把一些經歷在這裡總結總結。 二、所需軟體 VirtualBox 5.1.22 作業系統 :centos6.4 CentOS-6.4-x86_64-minimal.iso 一共需要3
虛擬機器中_CentOS相關網路配置
有關虛擬機器中國 Linux 版本中CentOS的虛擬網路配置 分成以下幾步: 第一步:點選 編輯 ---- 中 虛擬網路編輯器 第二步 : 點選 vmware8 此方式為 nat 模式 子網中 前三位隨
VirtualBox虛擬機器安裝Linux redhat 5.4 64位版本的過程中出現的問題及解決方法
問題一: 在使用VirtualBox虛擬機器安裝Linux redhat 5.4 64位版本的過程中,彈出 “VT-x/AMD-V 硬體加速器已被啟動,但當前處於無效狀態。您虛擬電腦內的作業系統將無法檢測到64位的CPU,因此也將無法啟動。”&n
VM虛擬機器中linux centOS 聯網單網絡卡配置教程
VM虛擬機器提供了三種聯網模式:主機模式,nat模式,橋接模式 1.主機模式 真實環境和虛擬環境是隔離開的;在這種模式下,所有虛擬系統可惜相互通訊,但是虛擬系統和真實網路是被隔開的,但主機可以上網。 2.