
三維空間中的圓與二維多段線
阿新 • • 發佈:2019-02-17
已知一段圓弧的起點、終點、弧度和法向,求此段圓弧的引數方程和引數區間。
P(U) = O + R*Cos(U)*XDir + R*Sin(U)*YDir二維多段線
二維多段線由直線段和圓弧段構成,二維的意思是多段線是固定在某一個平面上的,這個平面可由使用者任意指定。在ObjectARX中把這個平面稱作OCS(object coordinate system, 物件座標系),兩個引數可以確定這個OCS:平面的法向normal,WCS(world coordinate system, 世界座標系)的原點到OCS的原點的距離,求法可參見二維多段線的引數有:P1(第1點座標),...,Pn(第n點座標);Bulge_1,...,Bulge_n。其中Bulge_n是指第n點是圓弧的起點時,Bulge_n=tan(α/4),其中α是圓弧的夾角(從起點到終點,右手座標系),如果第n點是直線的起點時,Bulge_n=0。 為什麼Bulge_n=tan(α/4)?因為三角函式tan(α)的一個週期是[-π/2, π/2],而因為圓弧的 角度區間為[-2π, 2π],取Bulge_n=tan(α/4),是將圓弧的角度壓縮到[-π/2, π/2],這樣可以逆向求得α。
問題求解
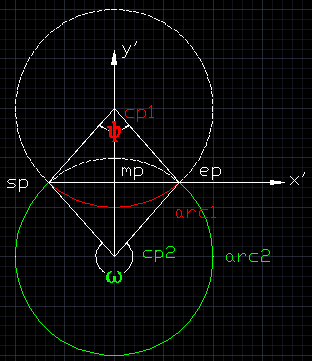
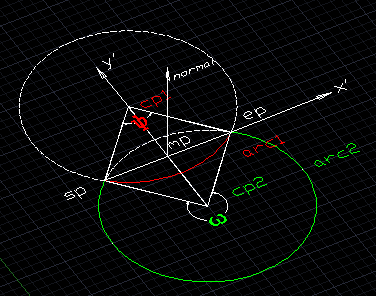
如上圖所示,點sp和ep分別為圓弧的起點和終點,點mp為線段spep的中點,法向normal朝向螢幕外,x'軸向為epsp方向,y‘軸向為以點mp為起點,normal×x'方向。當弧度θ為ω>π時,圓弧為arc2,點cp2為此圓弧的圓心;當弧度θ為0<ψ<π時,圓弧為arc1,點cp1為此圓弧的圓心。(ps: 圓弧的走勢始終是以sp為起點,逆時針繞至終點ep。基於此,若給定的弧度θ<0,則取絕對值|θ|,並將normal反向。) 下面列出求解過程的虛擬碼(假設給定的弧度θ>0)。
mp = (sp+ep)/2; y’ = normalize(normal×spep); cp = mp + y’|spmp|cotθ/2; radius = |spmp|/sinθ/2; xAxis = normalize(cpsp); yAxis = normalize(normal×xAxis)。 區間為[0, θ]。