
ROS2學習筆記(二)——ros2內部命令列工具介紹與使用
阿新 • • 發佈:2019-02-20
一、簡介
ROS2與ROS的基本概念還是差不多的,都有節點(Node)、話題(Topic)、訊息(Message)和服務(Service)之類的東西,具體這些概念請參見部落格ROS機器人系統學習筆記(三)--------認識節點(Node)和話題(Topic)
在這裡我們主要介紹一下ROS2中的相應的工具。
二、工具的介紹與使用
1、topic工具
不管在ROS還是ROS2中,topic都是十分重要的一個內容,對於一個話題,有釋出、訂閱、檢視資訊等操作。
在命令列中輸入如下命令,我們就可以在一個話題上進行釋出操作。
ros2 topic pub /chatter std_msgs/String "data: Hello world"
在這裡/chatter就是一個話題名,我們就將"Hello World"這個std_msgs/String型別的資訊釋出到了這個話題上。

我們可以使用如下命令來檢視這個話題所釋出的內容。
ros2 topic echo /chatter

結果如上圖所示。
還有下面的命令可以用於檢視一個話題的一些資訊。
ros2 topic info /chatter
2、msg命令
msg命令用於檢視訊息的型別所包含的內容、檢視訊息的一些詳細使用方法。
使用如下命令就可以看到某一種型別所包含的資料型別。
ros2 msg show visualization_msgs/InteractiveMarkerControl

ROS會顯示出如上圖的結果,我們可以看到上圖中的註釋中有很多的使用方法,這對於我們日後寫程式碼有很大的幫助。
3、pkg命令
這是我們所介紹的一個用於建立ROS2包的一個命令.
在工作空間的src目錄下使用命令:
ros2 pkg create learn
在控制檯內便會出現如下結果:
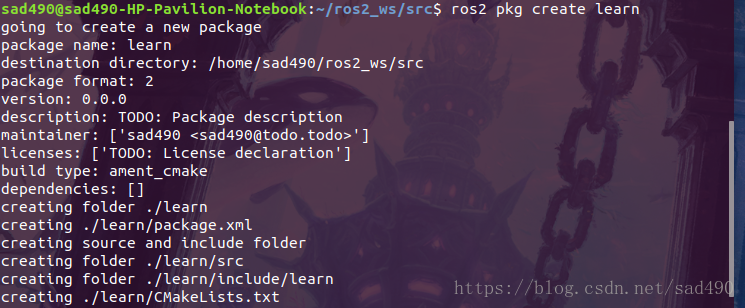
好了,你現在會發現你的src目錄下多了一個叫learn的包。