
多目標跟蹤MOT評價指標
阿新 • • 發佈:2019-03-30
數學模型 進行 enc 示意圖 並且 都在 ack image 結構
目錄
- 1. MOT評價指標
- 2. 實現思路
- 3. 計算指標
1. MOT評價指標
MOT:multiple object tracking
評價出發點:
- 所有出現的目標都要及時能夠找到;
- 目標位置要盡可能與真實目標位置一致;
- 每個目標都應該被分配一個獨一無二的ID,並且該目標分配的這個ID在整個序列中保持不變。
評價指標數學模型:
評價過程的步驟:
- 建立 目標與假設最優間的最優一一對應關系,稱為correspondence
- 對所有的correspondence,計算位置偏移誤差
- 累積結構誤差 a. 計算漏檢數 b. 計算虛警數(不存在目標卻判斷為目標) c. 跟蹤目標發生跳變的次數
2. 實現思路
- 確定對應關系
如何確定對應關系,最直接的想法就是使用最鄰近法?具體而言,就是比較groundtruth與預測框中心的距離。
另一個問題,如果沒有檢測到目標呢,所以需要設置一個距離閾值。
第三個問題,距離使用什麽距離?歐氏距離。(曼哈頓距離、余弦距離、馬氏距離不考慮,具體了解每種距離的物理意義和適用的情形、度量的特性)
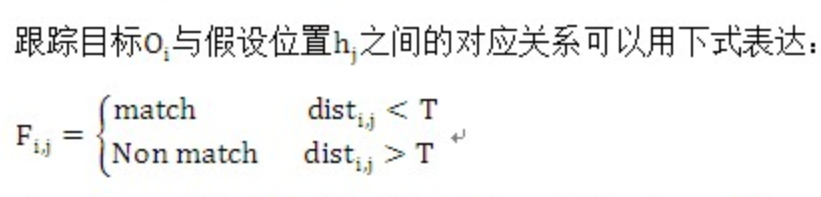
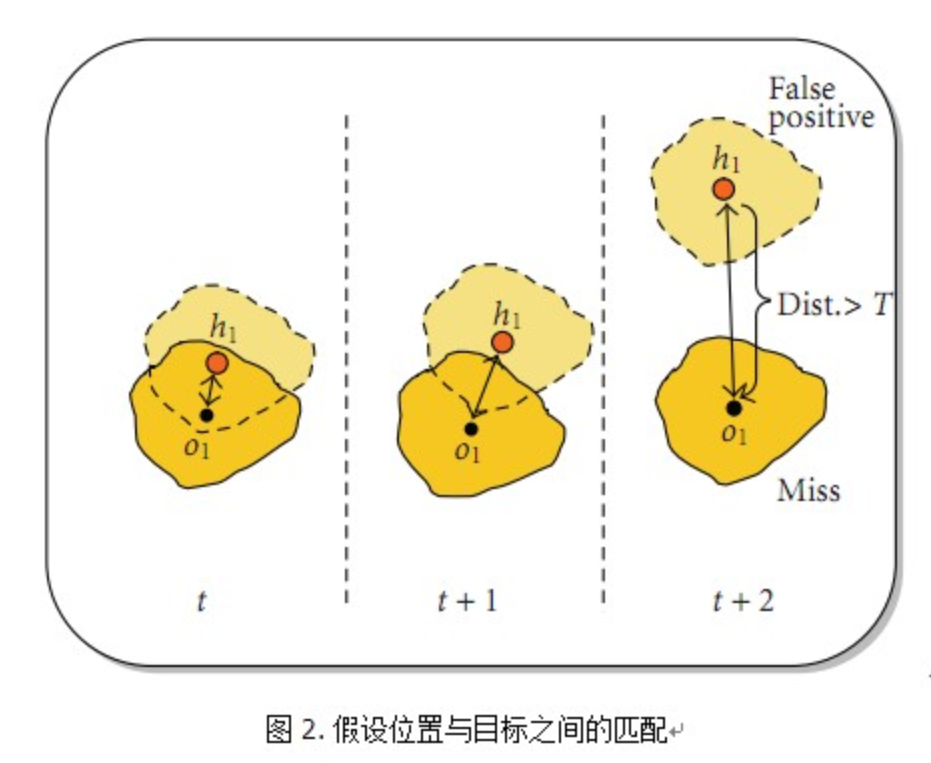
簡而言之,就是只要在一定的距離範圍內,就認為是匹配到了目標。
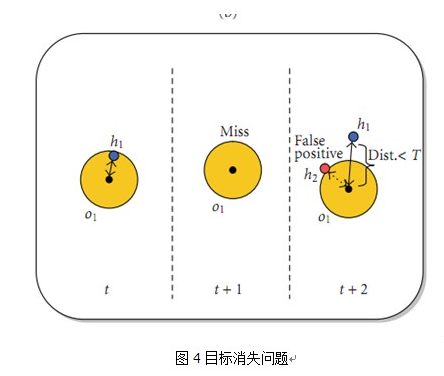
- 如何刻畫追蹤一致性(持續跟蹤)
追蹤一致性:追蹤預測目標和對應目標長時間保持對應關系不變的能力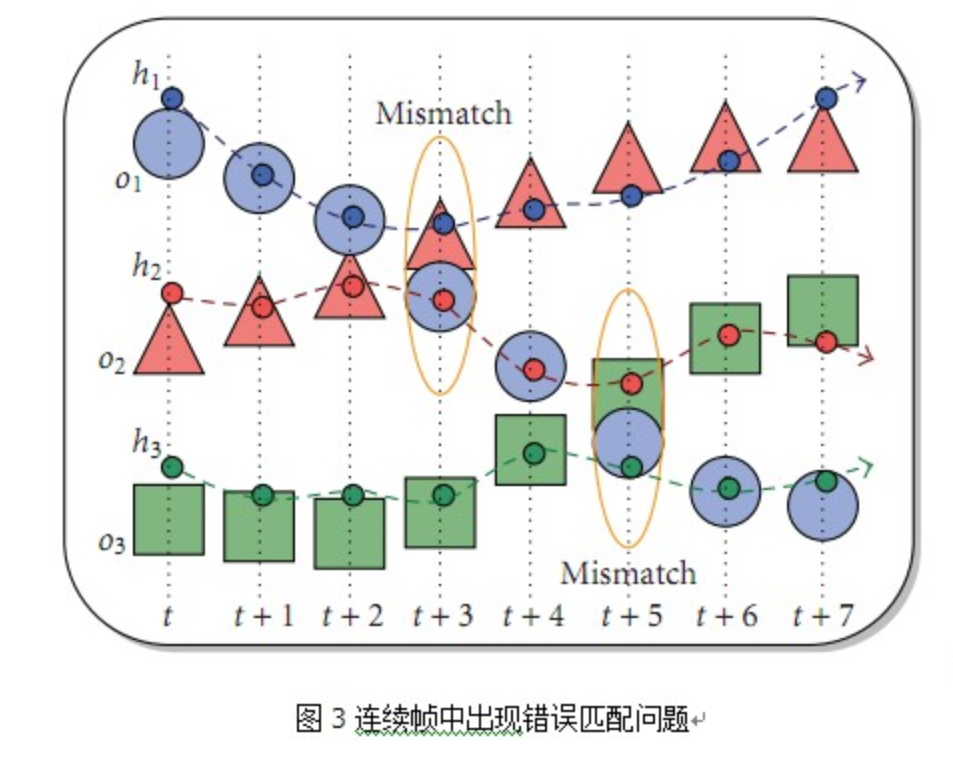
上圖分析:O1在正確匹配三幀之後發生了誤匹配問題。
總結:誤匹配問題多發生在兩個跟蹤目標很接近的時候。
問題與思考:如何記錄整個目標在整個幀頻中的無匹配次數。
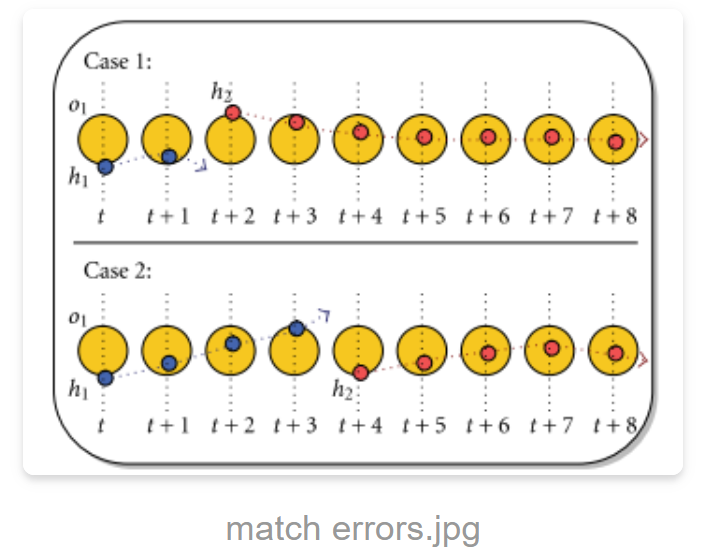
藍色點:匹配到了錯誤的目標
紅色點:匹配到了正確的目標
上述示意圖都在跟蹤對象O1,如果記錄無匹配次數的話,整個過程發生一次無匹配;
如果記錄無匹配的幀數,case1是2次誤匹配,case2是4次誤匹配
采用最優匹配序列對整個跟蹤鏈進行統計。具體方法如下:
- 構建假設位置與目標的匹配序列,Mt = {(Oi, Hi)} (該變量表示到t幀為止所建立的匹配序列)。在t+1幀,如果Oi的匹配對象是Hk, 發生誤匹配。同時將(Oi, Hk)更新到M(t+1)中。
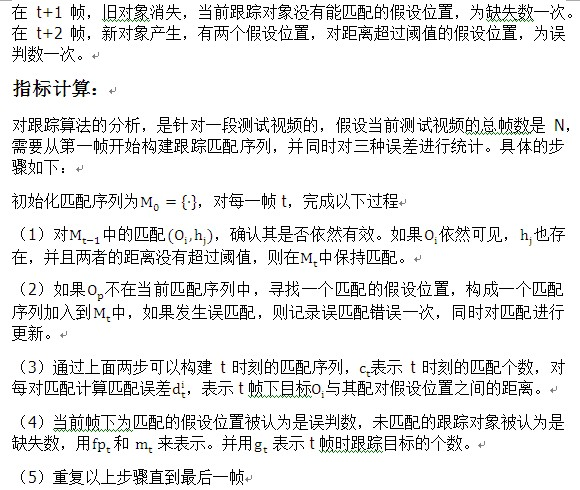
3. 計算指標
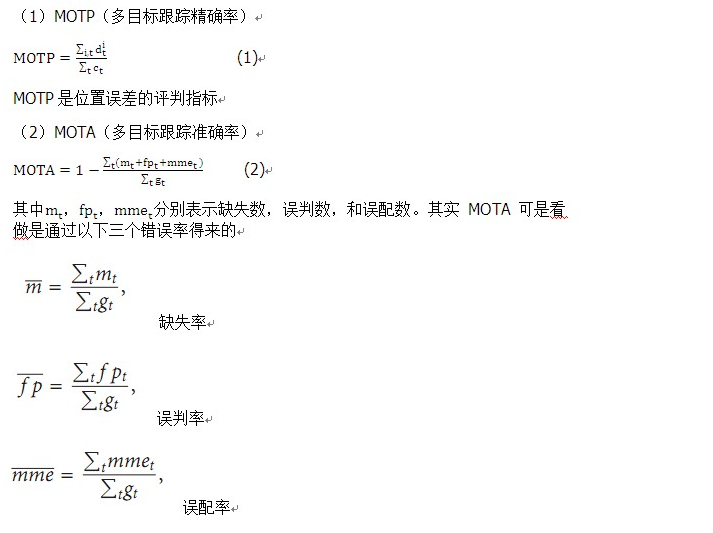
多目標跟蹤MOT評價指標