
人工智慧05 計算機視覺
計算機視覺
賦予機器人“看”的功能正是“機器視覺”這個學科所研究的問題之一。這一領域十分廣闊,不僅包括通用技術,而且也包括為數眾多的專用技術——如NLP、指紋識別、相片解釋和機器人控制等等。這裡僅介紹一些計算機視覺的概念。
引言
計算機視覺首先是在一組感光性原件上,生成一個場景的影象。這個影象是攝像機通過鏡頭對在視野中的場景進行一個透視投影,然後後光電元件將其轉化為一個二維的、隨時間變化的亮度矩陣影象I(x,y,t),其中x,y為光電元件在陣列中的位置,t為時間(對於有色視覺則需要三個這樣的矩陣來代表三原色)。一個由視覺引導的響應agent必須通過處理這個矩陣來產生這個場景的圖示模型或者一組特徵,從而使他能直接計算一個動作。
希望獲取資訊的種類取決於agent的目的和任務。若要讓一個agent平安地通過一個混亂的環境,這個agent必須瞭解其中物體的位置、邊界、通路以及它所經路徑表面的特性。agent也許還應具備根據每隔一段時間所有以上資訊的變化來預測將來了能的變化。從一個或多個影象中獲取此類資訊將及其困難,所以,只能給出這類技術的一個概況。
操縱一輛汽車
在S-R agent的一些應用中,神經網路可用來把影象亮度矩陣直接轉化為動作。其中一個突出的例子就是用來駕駛一輛汽車的ALVINN系統。
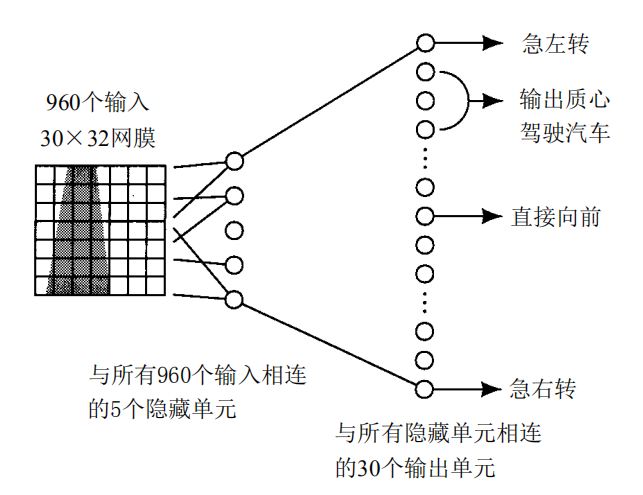

網路第一層有5個隱藏單元,第二層有30個輸出單元,以上所有單元均為sigmoid單元。輸出單元通過線性排列來控制汽車高度。若此輸出單元佇列頂端附近的一個輸出單元比其他大多數輸出單元高,則車向左行駛;若此輸出單元佇列底端附近的一個輸出單元比其他大多數輸出單元高,則車向右行駛。
此係統由改進過的“在空中(on-the-fly)”訓練方式來傳播,真人駕駛員開車,實際的駕駛角度被作為相應輸入的正確標誌。網路以反向傳播的方式遞增訓練,從而使他能用駕駛員所指定的駕駛角度來響應實際駕駛車輛時出現的每一個視覺模式。
機器視覺的兩個階段


-
影象處理階段把原始影象轉換成更適合於景物分析的影象。
-
影象處理包括降噪、增強邊緣和尋找影象區域等不同的濾波操作。
-
景物分析主要試圖從已處理的影象中產生一個對原始場景的圖示描述或基於特徵的描述,並提供agent所處環境中與特定任務有關的資訊。
影象處理
1. 平均法
假設初始影象可表達為一個m*n的陣列I(x,y),我們稱之為“影象亮度陣列”。他把影象平面分成許多被稱為“畫素(pixel)”的單元。這些數字表示這幅圖相中某點的光亮度,影象中一些不規則之處可通過求平均數的方法得以平滑。這種滑動並求和的操作稱為“卷積”。如果我們的得到的陣列十二進位制(1或0),那麼就必須把這些加權總和和一個閾值比較。平均法不僅將壓縮孤立的噪音點,而且將減小影象的捲曲度(crispness),放棄那些微不足道的影象元素。

有時,我們把加權函式W(x,y)的值在x和y構成的長方形內看做1,長方形之外看做0.長方形大小決定平滑度,長方形越大平滑度越高。下圖展示了一個求平均數操作是如何讓對一個二進位制影象先用一個長方形平滑函式平滑,然後將其與閾值比較來進行操作的。
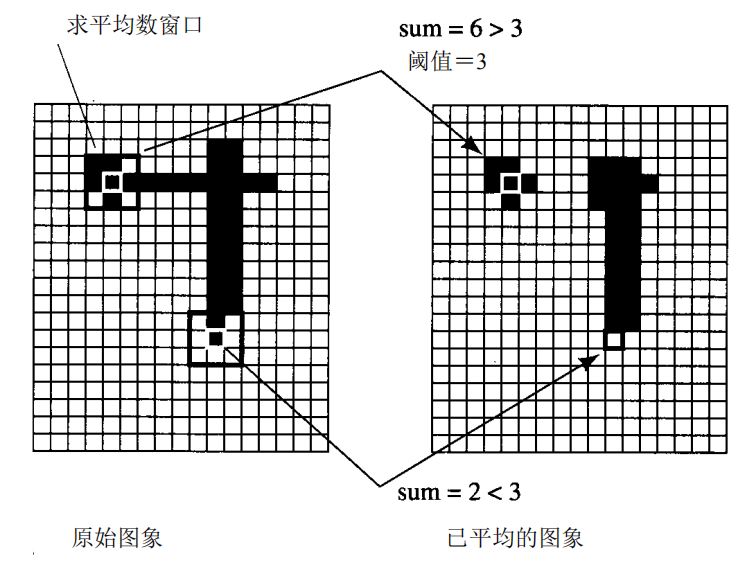
我們發現這個平滑操作加粗了寬線,去除了窄線和微小細節。


2. 邊緣增強
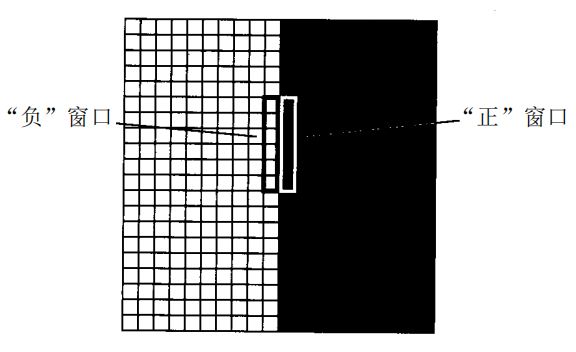
如前所述,計算機視覺常常設計影象邊緣的提取,然後用這些邊緣來把影象轉換成某種線條圖形。獲取輪廓的方法之一是先增強影象中的邊界和邊緣,邊緣可以是影象個部分之間的任意邊界。
我們可以通過在以為影象上卷積一個位於垂直線上的、一半為負一半為正的視窗來增強這些影象的邊緣強度。

3. 邊緣增強和平均法的結合

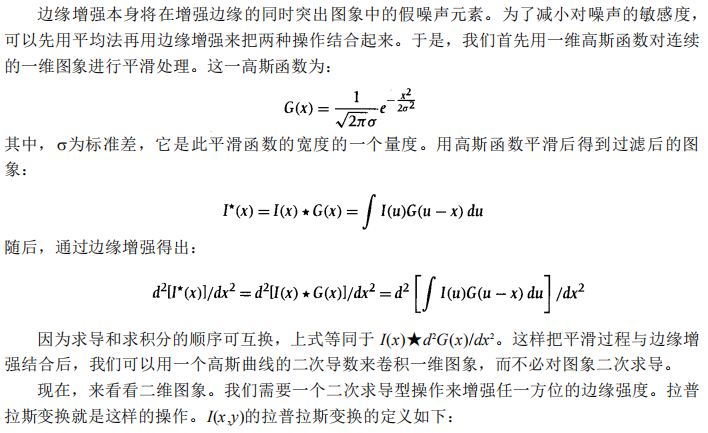


還有其他的變化比拉普拉斯變換更好,其中突出的有:Canny變換、Sobel變化、Hueckel變換等。
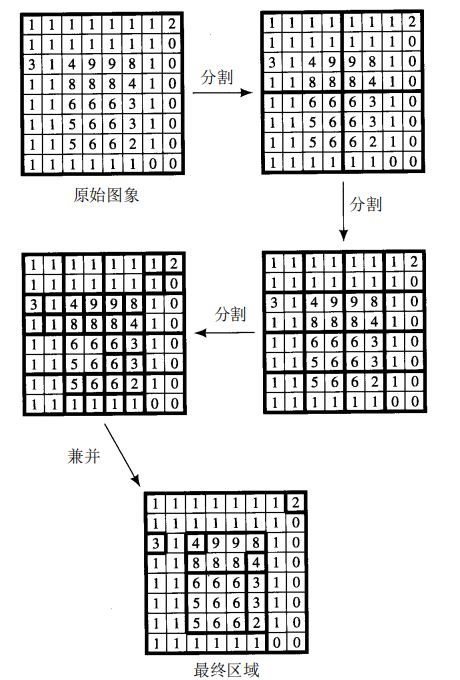
4. 區域查詢
首先,我們必須定義什麼是影象的一個區域。一個區域就是滿足一下特性的相互連線的畫素:

下圖運用了亮度差別不超過1個單元這個同質的特性。當無需再進行分割時,可以合併那些滿足此同質特性的相鄰的候選區域。

場景分析
在用以上技術對影象進行處理後,我們力圖從中獲取所需有關場景的資訊。計算機視覺的這個階段被稱為“場景分析”。
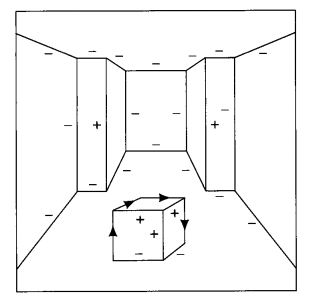
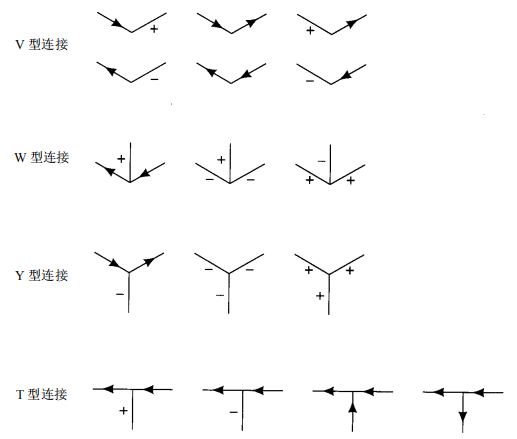
1. 解釋影象中的線條和曲線
對已知的包含直線物體的場景進行分析時,其中關鍵的一步就是影象中線條的假定。可以通過採用把直線段與邊緣或區域的邊界擬合的技術來生成直線。下圖就是對一個房間的解釋。


2.基於模型的視覺

相關推薦
人工智慧05 計算機視覺
計算機視覺 賦予機器人“看”的功能正是“機器視覺”這個學科所研究的問題之一。這一領域十分廣闊,不僅包括通用技術,而且也包括為數眾多的專用技術——如NLP、指紋識別、相片解釋和機器人控制等等。這裡僅介紹一些計算機視覺的概念。 引言 計
人工智慧、計算機視覺、模式識別領域論文發表去處
(1)pattern recognition letters, 從投稿到發表,一年半時間審稿期7個月(Elsevier)。 (2)Pattern recognition 不好中,時間長 (3)IEICE Transactions&n
人工智慧分支-計算機視覺
課程一、基於Python資料分析與機器學習案例實戰教程課程風格通俗易懂,基於真實資料集案例實戰。主體課程分成三個大模組(1)python資料分析,(2)機器學習經典演算法原理詳解,(3)十大經典案例實戰。通過python資料科學庫numpy,pandas,matplot結合機器學習庫scikit-learn完
白話人工智慧與機器學習、計算機視覺
人類的智慧行為分為感知行為和思維活動 計算機視覺 :計算機對三維世界的感知 計算機聽覺 :語音識別 話者識別 計算機思維: 證明 推理 人工
專訪唐宇迪博士:我是如何邁入同濟大學校園的?淺談人工智慧,未來資料探勘和計算機視覺是風口
1.網上很多同學對老師您的簡歷非常好奇,在百度搜索上發現大家都很關心“唐宇迪是哪個學校畢業的”?關於您的學習經歷能簡單說下嗎? 唐宇迪:幾年前第一次邁進同濟大學校園,攻讀博士學位,並加入了資料探勘專案組,以此真正開始了機器學習之旅。學習的過程有些枯燥在所難免,但是想著可以將演算法應用於實驗當中,
2019年度【計算機視覺&機器學習&人工智慧】國際重要會議彙總
簡介 每年全世界都會舉辦很多計算機視覺(Computer Vision,CV)、 機器學習(Machine Learning,ML)、人工智慧(Artificial Intelligence ,AI)領域的學術會議。筆者選取了其中影響力較大,有代表性的重要會議進行了彙總,特意按照時間進行了排序,方便大家檢視
人工智慧,深度學習,計算機視覺,自然語言處理,機器學習,百度網盤視訊教程
人工智慧,深度學習,計算機視覺,自然語言處理,機器學習視訊教程下載: 1. CS224D 2. NLP到Word2vec 3. Opencv3影象處理 4. Tensorflow 5. 機器學習 6. 人工智慧課程 7. 聊天機器人視訊教程 8. 自然語言處理 獲取檔案下載連結
深度學習與計算機視覺(PB-05)-網路微調
在第3節中,我們學習瞭如何將預訓練好的卷積神經網路作為特徵提取器。通過載入預訓練好的模型,可以提取指定層的輸出作為特徵向量,並將特徵向量儲存到磁碟。有了特徵向量之後,我們就可以在特徵向量上訓練傳統的機器學習演算法(比如在第3節中我們使用的邏輯迴歸模型)。當然對於特徵向量,我們也可以使用手工提
轉:為什麼不去讀頂級會議上的論文?適應於機器學習、計算機視覺和人工智慧
看了版上很多貼子,發現很多版友都在問“熱門研究方向”、“最新方法”等。有同學建議國內某教授的教材、或者CNKI、或者某些SCI期刊。每當看到這種問題,我都有點納悶,為什麼不去讀頂級會議上的論文? 我無意否認以上文獻的價值,但是在機器學習、計算機視覺和人工智慧領域,頂級會議才
2019年度【計算機視覺&機器學習&人工智慧】國際重要會議彙總
簡介 每年全世界都會舉辦很多計算機視覺(Computer Vision,CV)、 機器學習(Machine Learning,ML)、人工智慧(Artificial Intelligence ,AI)領域的學術會議。筆者選取了其中影響力較大,有代表性的重要會議進
【收藏】2018年不容錯過的20大人工智慧/機器學習/計算機視覺等頂會時間表
點選有驚喜 目錄 人工智慧/機器學習計算機視覺/模式識別自然語言處理/計算語言學體系結構資料探勘/資訊檢索計算機圖形學 人工智慧/機器學習 1. AAAI 2018 會議時間:2月2日~7日 會議地點: 新奧爾良市,美國 AAAI是人工智慧領域的主要學術
朱鬆純:初探計算機視覺的三個源頭_兼談人工智慧
來源:http://www.stat.ucla.edu/~sczhu/Blog_articles/正本清源:%20初探計算機視覺的三個源頭_兼談人工智慧.pdf 我覺得他講的挺好,機器學習其實並沒有本質上的創新,所用思想方法與以往並無根本區別,往往換個名字,不談來歷,大有
計算機視覺、機器學習、人工智慧領域知識彙總
2012年8月21號開始了我的第一篇博文,也開始了我的研究生生涯。懷著對機器學習和計算機視覺等等領域的懵懂,從一個電子材料的領域跨入這個高速發展的人工智慧領域。從開始的因無知而驚慌,因陌生而乏力,到一步步的成長。這過程的知識積累也都大部分反映在這個部落格
人工智慧之深度學習《計算機視覺的深度學習實踐》
人工智慧的時代,深度學習這個熱點是每個程式設計師必須瞭解的內容。近年來深度學習研究得到了充分的發展,但系統的課程少之又少,能夠理論聯絡實際,適合初學程式設計師學習的課程更是鳳毛麟角。 葉梓老師,擁有多年的企業實踐經驗,結合實踐在小象學院平臺直播 《計算機視覺的深度學習實踐》
人工智慧火爆 國內這幾家計算機視覺公司值得關注
人工智慧自降生以來就彷彿自帶光環、備受矚目。尤其是今年,國務院印發的《新一代人工智慧發展規劃》中提出,到2030年使中國人工智慧理論、技術與應用總體達到世界領先水平,成為世界主要人工智慧創新中心,更使得人工智慧將引爆智慧投資革命成為行業及大眾議論的焦點。作為人工智慧(AI
人工智慧-計算機視覺-影象處理-模式識別的關係
影象處理是將輸入影象轉換為輸出影象的過程,人是影象處理的效果的最終解釋者; 在計算機視覺中,計算機是影象的解釋者;影象處理僅僅是計算機視覺系統中的一個模組; 計算機圖形學的主要工作是從三維描述到二維影象顯示的過程; 計算機視覺則是從二維影象資料到三維描述的過程,計算機視覺是
計算機視覺,影象處理,人工智慧大作業打包(要COPY的點進來吧 23333)
本篇文章中有計算機視覺,影象處理,人工智慧的大作業,具體有哪些看下面圖片大的功能有邊緣檢測,影象去噪,PCA降維,神經網路然後邊緣檢測,影象去噪中有各種運算元,是用C寫的。PCA降維神經網路 包含3個. 分別是手寫字型識別,車牌識別,人臉識別。下載連結 : http
淺談人工智慧,機器學習,計算機視覺之間的關係
計算機視覺相當於是人工智慧的大門,如果這個門不開啟,就沒有辦法真的研究真實世界的人工智慧。因為視覺資訊與聽覺觸覺相比要重要得多,人的大腦皮層70%的活動都在處理視覺資訊,如果沒有視覺資訊的話,整個人工智慧只是一個空架子,只能做符號推理(下棋,定理證明等)。 計
2017年【計算機視覺+機器學習+人工智慧】領域重要會議 彙總
國內/外每年都會舉辦很多計算機視覺(Computer Vision,CV)、 機器學習(Machine Learning,ML)、人工智慧(Artificial Intelligence ,AI)領域相關的很多學術會議和研討會等。在此把我所知道的2017年國內/外即將舉辦的C
『python』OpenCV3計算機視覺庫安裝
targe cond 最新 cnblogs enc 2.0 sent lan oca 1.下載OpenCV: https://codeload.github.com/Itseez/opencv/zip/3.0.0 2.解壓下載相關依賴: sudo apt-get inst