
Android Camera原理之CameraDeviceCallbacks回撥模組
在講解《Android Camera原理之openCamera模組(二)》一文的時候提到了CameraDeviceCallbacks回撥,當時沒有詳細展開,本文我們詳細展開講解一下。
CameraDeviceCallbacks生成過程:
《Android Camera程序間通訊類總結》中2.ICameraDeviceCallbacks.aidl詳細總結了CameraDeviceCallbacks的生成過程。
frameworks/av/camera/ndk/impl/ACameraDevice.h中回撥介面如下。這個CameraDeviceCallbacks是openCamera的時候設定到camera service端的,後續HAL層有camera響應的話會呼叫ACameraDevice.h
ServiceCallback介面來實現回撥。我們需要從流程上搞清楚這些回撥是在什麼場景下觸發的,明白了這些,才真正明白camera capture的流程。
// Callbacks from camera service class ServiceCallback : public hardware::camera2::BnCameraDeviceCallbacks { public: explicit ServiceCallback(CameraDevice* device) : mDevice(device) {} binder::Status onDeviceError(int32_t errorCode, const CaptureResultExtras& resultExtras) override; binder::Status onDeviceIdle() override; binder::Status onCaptureStarted(const CaptureResultExtras& resultExtras, int64_t timestamp) override; binder::Status onResultReceived(const CameraMetadata& metadata, const CaptureResultExtras& resultExtras, const std::vector<PhysicalCaptureResultInfo>& physicalResultInfos) override; binder::Status onPrepared(int streamId) override; binder::Status onRequestQueueEmpty() override; binder::Status onRepeatingRequestError(int64_t lastFrameNumber, int32_t stoppedSequenceId) override; private: const wp<CameraDevice> mDevice; };
1.onDeviceError
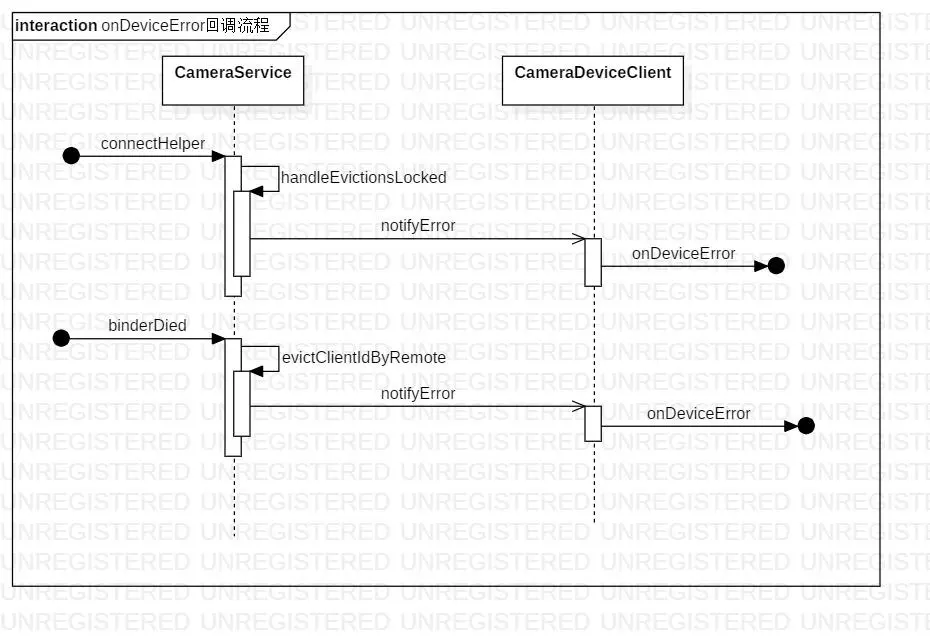
onDeviceError回撥流程.jpg
- connectHelper
在openCamera執行的時候會檢查當前camera device是否正常。- binderDied
在camera service 死亡 的時候,死亡回撥中會通知上層當前的camera device可能有問題。
還有一個呼叫的地方是Camera3Device::notifyError--->從HAL傳遞上來的,關於當前device是否正常的資訊,如果device存在問題執行回撥--->listener->notifyError(errorCode, resultExtras);
void Camera3Device::notifyError(const camera3_error_msg_t &msg,
sp<NotificationListener> listener) {
ATRACE_CALL();
// Map camera HAL error codes to ICameraDeviceCallback error codes
// Index into this with the HAL error code
static const int32_t halErrorMap[CAMERA3_MSG_NUM_ERRORS] = {
// 0 = Unused error code
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_INVALID_ERROR,
// 1 = CAMERA3_MSG_ERROR_DEVICE
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_DEVICE,
// 2 = CAMERA3_MSG_ERROR_REQUEST
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST,
// 3 = CAMERA3_MSG_ERROR_RESULT
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT,
// 4 = CAMERA3_MSG_ERROR_BUFFER
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_BUFFER
};
int32_t errorCode =
((msg.error_code >= 0) &&
(msg.error_code < CAMERA3_MSG_NUM_ERRORS)) ?
halErrorMap[msg.error_code] :
hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_INVALID_ERROR;
int streamId = 0;
if (msg.error_stream != NULL) {
Camera3Stream *stream =
Camera3Stream::cast(msg.error_stream);
streamId = stream->getId();
}
ALOGV("Camera %s: %s: HAL error, frame %d, stream %d: %d",
mId.string(), __FUNCTION__, msg.frame_number,
streamId, msg.error_code);
CaptureResultExtras resultExtras;
switch (errorCode) {
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_DEVICE:
// SET_ERR calls notifyError
SET_ERR("Camera HAL reported serious device error");
break;
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST:
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT:
case hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_BUFFER:
{
Mutex::Autolock l(mInFlightLock);
ssize_t idx = mInFlightMap.indexOfKey(msg.frame_number);
if (idx >= 0) {
InFlightRequest &r = mInFlightMap.editValueAt(idx);
r.requestStatus = msg.error_code;
resultExtras = r.resultExtras;
if (hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT == errorCode
|| hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_REQUEST ==
errorCode) {
r.skipResultMetadata = true;
}
if (hardware::camera2::ICameraDeviceCallbacks::ERROR_CAMERA_RESULT ==
errorCode) {
// In case of missing result check whether the buffers
// returned. If they returned, then remove inflight
// request.
removeInFlightRequestIfReadyLocked(idx);
}
} else {
resultExtras.frameNumber = msg.frame_number;
ALOGE("Camera %s: %s: cannot find in-flight request on "
"frame %" PRId64 " error", mId.string(), __FUNCTION__,
resultExtras.frameNumber);
}
}
resultExtras.errorStreamId = streamId;
if (listener != NULL) {
listener->notifyError(errorCode, resultExtras);
} else {
ALOGE("Camera %s: %s: no listener available", mId.string(), __FUNCTION__);
}
break;
default:
// SET_ERR calls notifyError
SET_ERR("Unknown error message from HAL: %d", msg.error_code);
break;
}
}
2.onDeviceIdle
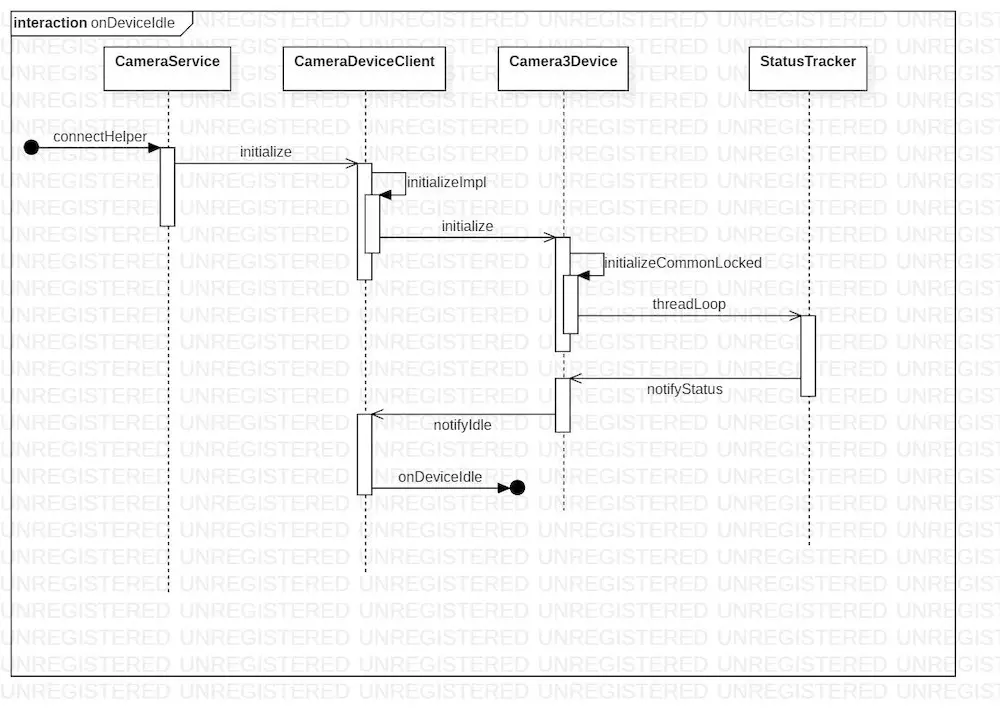
onDeviceIdle回撥流程.jpg
openCamera執行之後開始呼叫到onDeviceIdle回撥。這兒的呼叫過程需要講講Camera3Device::initializeCommonLocked
status_t Camera3Device::initializeCommonLocked() {
/** Start up status tracker thread */
mStatusTracker = new StatusTracker(this);
status_t res = mStatusTracker->run(String8::format("C3Dev-%s-Status", mId.string()).string());
if (res != OK) {
SET_ERR_L("Unable to start status tracking thread: %s (%d)",
strerror(-res), res);
mInterface->close();
mStatusTracker.clear();
return res;
}
//......
}
StatusTracker是C++中定義的執行緒,和java層有點類似,執行緒執行run會自動呼叫到threadLoop(),這應該很好理解。
class StatusTracker: public Thread {
public:
explicit StatusTracker(wp<Camera3Device> parent);
~StatusTracker();
virtual void requestExit();
protected:
virtual bool threadLoop();
}
接下來這個threadLoop()會一直執行,如果在執行過程中發現當前的mStateTransitions[表示裝置狀態]處於IDLE,這時候回撥到上層。
// Notify parent for all intermediate transitions
if (mStateTransitions.size() > 0 && parent.get()) {
for (size_t i = 0; i < mStateTransitions.size(); i++) {
bool idle = (mStateTransitions[i] == IDLE);
ALOGV("Camera device is now %s", idle ? "idle" : "active");
parent->notifyStatus(idle);
}
}
3.onCaptureStarted
這個回撥函式表示camera device已經準備好,可以開始呼叫camera獲取capture frame資料了。回撥的開始是camera HAL層獲取底層camera device driver通知表示當前device已經準備好。通知的函式在Camera3Device::notify
Camera3Device::notify
底層msg通知當前camera 開門準備好了,可以隨時準備拍照了。
void Camera3Device::notify(const camera3_notify_msg *msg) {
ATRACE_CALL();
sp<NotificationListener> listener;
{
Mutex::Autolock l(mOutputLock);
listener = mListener.promote();
}
if (msg == NULL) {
SET_ERR("HAL sent NULL notify message!");
return;
}
switch (msg->type) {
case CAMERA3_MSG_ERROR: {
notifyError(msg->message.error, listener);
break;
}
case CAMERA3_MSG_SHUTTER: {
notifyShutter(msg->message.shutter, listener);
break;
}
default:
SET_ERR("Unknown notify message from HAL: %d",
msg->type);
}
}
Camera3Device::notifyShutter
--->CameraDeviceClient::notifyShutter
此時回撥到上層通知開發者當前的device shutter準備好了。
void CameraDeviceClient::notifyShutter(const CaptureResultExtras& resultExtras,
nsecs_t timestamp) {
// Thread safe. Don't bother locking.
sp<hardware::camera2::ICameraDeviceCallbacks> remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onCaptureStarted(resultExtras, timestamp);
}
Camera2ClientBase::notifyShutter(resultExtras, timestamp);
}
4.onResultReceived
預覽的時候這個函式很重要,表示抓取的幀資料不斷地返回,camera device正在不斷消耗capture frame。
CameraDeviceClient::initializeImpl--->CameraDeviceClient初始化執行的時候會啟動FrameProcessorBase執行緒。
FrameProcessorBase繼承一個執行緒,執行run之後,它的threadLoop開始啟動。
template<typename TProviderPtr>
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr, const String8& monitorTags) {
//......
String8 threadName;
mFrameProcessor = new FrameProcessorBase(mDevice);
threadName = String8::format("CDU-%s-FrameProc", mCameraIdStr.string());
mFrameProcessor->run(threadName.string());
mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,
FRAME_PROCESSOR_LISTENER_MAX_ID,
/*listener*/this,
/*sendPartials*/true);
//......
}
FrameProcessorBase::threadLoop
此時會不斷到Camera HAL層取請求,是否有新的frame資料,如果有的話,處理capture frame資料。
bool FrameProcessorBase::threadLoop() {
status_t res;
sp<CameraDeviceBase> device;
{
device = mDevice.promote();
if (device == 0) return false;
}
res = device->waitForNextFrame(kWaitDuration);
if (res == OK) {
processNewFrames(device);
} else if (res != TIMED_OUT) {
ALOGE("FrameProcessorBase: Error waiting for new "
"frames: %s (%d)", strerror(-res), res);
}
return true;
}
FrameProcessorBase::processNewFrames
--->FrameProcessorBase::processSingleFrame
--->FrameProcessorBase::processListeners
--->CameraDeviceClient::onResultAvailable
通過CameraDeviceClient::onResultAvailable函式回撥到上層,然後在回撥到CameraCaptureSession.CaptureCallback--->onCaptureProgressed告知開發者當前正在不斷捕獲capture frame資料。
/** Device-related methods */
void CameraDeviceClient::onResultAvailable(const CaptureResult& result) {
ATRACE_CALL();
ALOGV("%s", __FUNCTION__);
// Thread-safe. No lock necessary.
sp<hardware::camera2::ICameraDeviceCallbacks> remoteCb = mRemoteCallback;
if (remoteCb != NULL) {
remoteCb->onResultReceived(result.mMetadata, result.mResultExtras,
result.mPhysicalMetadatas);
}
}
5.onPrepared
CameraCaptureSession中有兩個介面:這個函式主要是用來給surface預分配記憶體,但是為了加速預覽顯示的速度。
public abstract void prepare(@NonNull Surface surface) throws CameraAccessException;
public abstract void prepare(int maxCount, @NonNull Surface surface)
throws CameraAccessException;
而CameraDeviceCallbacks->onPrepared回撥就是在執行CameraCaptureSession->prepare之後回撥執行的。如果向HAL申請camera device 記憶體分配成功,才會觸發這個回撥。
6.onRequestQueueEmpty
onRequestQueueEmpty回撥是當前camera device的非預覽流佇列為空,開始準備capture 下一張圖片了,只是一箇中間狀態。這兒不太重要,我列個呼叫流程就行了。
Camera3Device::RequestThread::threadLoop
bool Camera3Device::RequestThread::threadLoop() {
//......
// Wait for the next batch of requests.
waitForNextRequestBatch();
//......
}
Camera3Device::RequestThread::waitForNextRequestBatch
void Camera3Device::RequestThread::waitForNextRequestBatch() {
//......
NextRequest nextRequest;
nextRequest.captureRequest = waitForNextRequestLocked();
if (nextRequest.captureRequest == nullptr) {
return;
}
nextRequest.halRequest = camera3_capture_request_t();
nextRequest.submitted = false;
mNextRequests.add(nextRequest);
// Wait for additional requests
const size_t batchSize = nextRequest.captureRequest->mBatchSize;
for (size_t i = 1; i < batchSize; i++) {
NextRequest additionalRequest;
additionalRequest.captureRequest = waitForNextRequestLocked();
if (additionalRequest.captureRequest == nullptr) {
break;
}
additionalRequest.halRequest = camera3_capture_request_t();
additionalRequest.submitted = false;
mNextRequests.add(additionalRequest);
}
//......
}
Camera3Device::RequestThread::waitForNextRequestLocked
sp<Camera3Device::CaptureRequest>
Camera3Device::RequestThread::waitForNextRequestLocked() {
//......
if (nextRequest == NULL) {
// Don't have a repeating request already in hand, so queue
// must have an entry now.
RequestList::iterator firstRequest =
mRequestQueue.begin();
nextRequest = *firstRequest;
mRequestQueue.erase(firstRequest);
if (mRequestQueue.empty() && !nextRequest->mRepeating) {
sp<NotificationListener> listener = mListener.promote();
if (listener != NULL) {
listener->notifyRequestQueueEmpty();
}
}
}
//......
}
CameraDeviceClient::notifyRequestQueueEmpty這兒會直接回調到上層。
void CameraDeviceClient::notifyRequestQueueEmpty() {
// Thread safe. Don't bother locking.
sp<hardware::camera2::ICameraDeviceCallbacks> remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onRequestQueueEmpty();
}
}
7.onRepeatingRequestError
Camera3Device.h中定義了一個RequestThread執行緒,用來管理capture request和HAL device之間的連線。
/**
* Thread for managing capture request submission to HAL device.
*/
class RequestThread : public Thread {
//......
protected:
virtual bool threadLoop();
}
RequestThread啟動的地方在Camera3Device::initializeCommonLocked中。
/** Start up request queue thread */
mRequestThread = new RequestThread(this, mStatusTracker, mInterface, sessionParamKeys);
res = mRequestThread->run(String8::format("C3Dev-%s-ReqQueue", mId.string()).string());
if (res != OK) {
SET_ERR_L("Unable to start request queue thread: %s (%d)",
strerror(-res), res);
mInterface->close();
mRequestThread.clear();
return res;
}
執行緒核心的執行邏輯都在threadLoop函式中--->bool Camera3Device::RequestThread::threadLoop()
bool Camera3Device::RequestThread::threadLoop() {
//......
// Prepare a batch of HAL requests and output buffers.
res = prepareHalRequests();
if (res == TIMED_OUT) {
// Not a fatal error if getting output buffers time out.
cleanUpFailedRequests(/*sendRequestError*/ true);
// Check if any stream is abandoned.
checkAndStopRepeatingRequest();
return true;
} else if (res != OK) {
cleanUpFailedRequests(/*sendRequestError*/ false);
return false;
}
//......
}
請求HAL 層的device,如果請求超時,此時的預覽是無法進行下去的。執行checkAndStopRepeatingRequest();
void Camera3Device::RequestThread::checkAndStopRepeatingRequest() {
//......
if (listener != NULL && surfaceAbandoned) {
listener->notifyRepeatingRequestError(lastFrameNumber);
}
}
最終呼叫到CameraDeviceClient::notifyRepeatingRequestError,然後直接回調到上層,通知開發者當前的capture request請求失敗了。
void CameraDeviceClient::notifyRepeatingRequestError(long lastFrameNumber) {
sp<hardware::camera2::ICameraDeviceCallbacks> remoteCb = getRemoteCallback();
if (remoteCb != 0) {
remoteCb->onRepeatingRequestError(lastFrameNumber, mStreamingRequestId);
}
Mutex::Autolock idLock(mStreamingRequestIdLock);
mStreamingRequestId = REQUEST_ID_NONE;
}