
從0開始學FreeRTOS-1
阿新 • • 發佈:2019-10-15
我們知道,(單核)微控制器某一時刻只能幹一件事,會造成微控制器資源的浪費,而且還有可能響應不夠及時,所以,在比較龐大的程式或者是要求實時性比較高的情況下,我們可以移植作業系統。因為這種情況下作業系統比裸機方便很多,效率也高。下面,傑傑將帶你們走進FreeRTOS的世界隨便看看。
下面正式開始本文內容。
在沒有用到作業系統之前,微控制器的執行是順序執行,就是說,很多時候,微控制器在執行這件事的時候,無法切換到另一件事。這就造成了資源的浪費,以及錯過了突發的訊號。那麼,用上了作業系統的時候,很容易避免了這樣的問題。
很簡單,從感覺上,微控制器像是同時在幹多件事,為什麼說像呢,因為微控制器的執行速度很快,快到我們根本沒辦法感覺出來,但是同時做兩件事是不可能的,在(單核)微控制器中,因為它的硬體結構決定了CPU只能在一個時間段做一件事如:
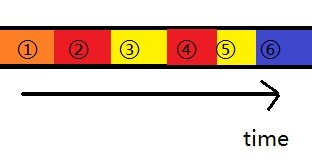
如這張圖,都是按照順序來執行這些事的,假設每個任務(事件)的time無限小,小到我們根本沒法分辨出來,那麼我們也會感覺微控制器在同時做這六件事。
真相就是:所有任務都好像在執行,但實際上在任何一個時刻都只有一個任務在執行
如是加上了中斷系統的話,就可以將上圖理解為下圖:
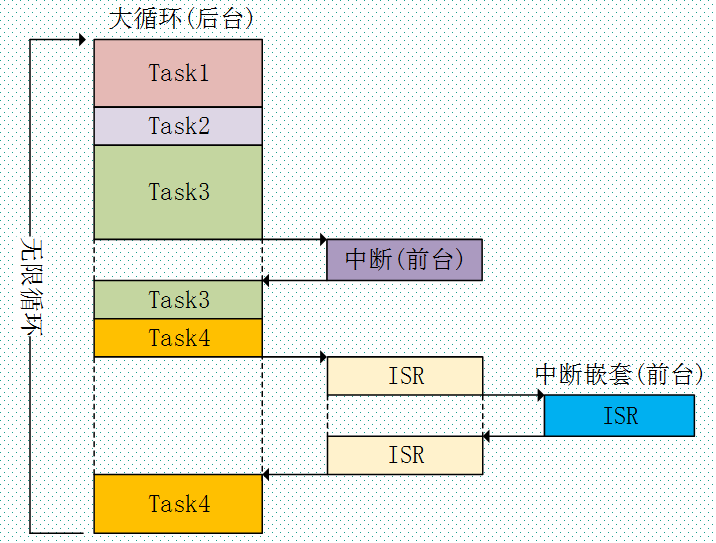
通常把程式分為兩部分:前臺系統和後臺系統。 簡單的小系統通常是前後臺系統,這樣的程式包括一個死迴圈和若干個中斷服務程式:應用程式是一個無限迴圈,迴圈中呼叫API函式完成所需的操作,這個大迴圈就叫做後臺系統。中斷服務程式用於處理系統的非同步事件,也就是前臺系統。前臺是中斷級,後臺是任務級。簡單來說就是程式一直按順序執行,有中斷來了就做中斷(前臺)的事情。處理完中斷(前臺)的事情,就回到大迴圈(後臺)繼續按順序執行。
那麼問題來了,這樣子的系統肯定不是好的系統,我在做第一個任務的時候想做第四個任務,根本做不到啊,其實也能做到,讓程式執行的指標cp指向第四個任務就行了。但是任務一旦複雜,那麼整個工程的程式碼的結構,可移植性,及可讀性,肯定會差啦。
FreeRTOS
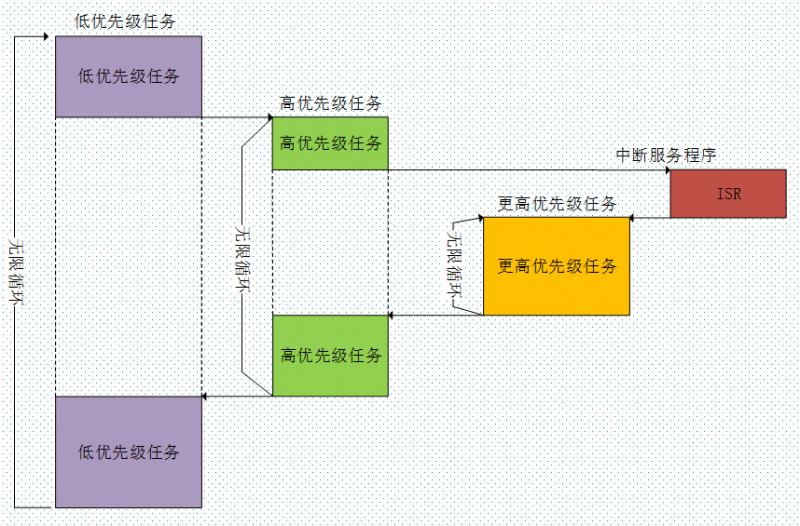
那麼作業系統的移植就是不可或缺的了。什麼叫RTOS?:Real Time OS,實時作業系統,強調的是實時性,就是要規定什麼時間該做什麼任務。那麼假如同一個時刻,需要執行兩個或者多個任務怎麼辦。那麼我們可以人為地把任務劃分優先順序,哪個任務重要,就先做,因為前面一直強調,微控制器無法同時做兩件事,在某一個時刻只能做一件事。
那麼FreeRTOS是怎麼操作的呢?先看看FreeRTOS的核心吧:
FreeRTOS是一個可裁剪、可剝奪型的多工核心,而且沒有任務數限制。FreeRTOS提供了實時作業系統所需的所有功能,包括資源管理、同步、任務通訊等。 FreeRTOS是用C和彙編來寫的,其中絕大部分都是用C語言編寫的,只有極少數的與處理器密切相關的部分程式碼才是用匯編寫的,FreeRTOS結構簡潔,可讀性很強!RTOS的核心負責管理所有的任務,核心決定了執行哪個任務,何時停止當前任務切換到其他任務,這個是核心的多工管理能力。
可剝奪核心顧名思義就是可以剝奪其他任務的CPU使用權,它總是執行就緒任務中的優先順序最高的那個任務。
在FreeRTOS中,每個任務都是無限迴圈的,一般來說任務是不會結束執行的,也不允許有返回值,任務的結構一般都是
```js
While(1)
{
/****一直在迴圈執行*****/
}
```
如果不需要這個任務了,那就把它刪除。
移植的教程我就不寫了,超級簡單的,按照已有的大把教程來做就行了。(如果沒有資源,可以在後臺找我,我給一份移植的教程/原始碼)
其實FreeRTOS的運用及其簡單,移植成功按照自己的意願來配置即可,而且FreeRTOS有很多手冊,雖然作者英語很差,但是我有谷歌翻譯!!!哈哈哈
既然一直都說任務任務,那肯定要有任務啊,建立任務:
```js
// task. h task.c
BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
const char * const pcName,
uint16_t usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pvCreatedTask
);
```
函式的原型都有,按照字面的理解
```js
TaskFunction_t pvTaskCode //傳遞進來的是任務函式
const char * const pcName //傳遞進來的是任務Name
uint16_t usStackDepth //傳入的是堆疊的大小
```
在這裡要說明一下,在裸機中開發,我們不管區域性變數還是全域性變數,反正定義了就能用,中斷髮生時,函式返回地址發哪裡,我們也不管。但是在作業系統中,我們必須弄清楚我們的引數是怎麼儲存的,他們的大小是多大,就需要我們去定義這個堆疊的大小。它就是用來存放我們的這些東西的。太小,導致堆疊溢位,發生異常。(棧是微控制器 RAM 裡面一段連續的記憶體空間)
因為在多工系統中,每個任務都是獨立的,互不干擾的,所以要為每個任務都分配獨立的棧空間。
```js
void *pvParameters //傳遞給任務函式的引數
UBaseType_t uxPriority //任務優先順序
TaskHandle_t *pvCreatedTask //任務控制代碼
```
任務控制代碼也是很重要的東西,我們怎麼刪除任務也是要用到任務控制代碼,其實說白了,我作業系統怎麼知道你是什麼任務,靠的就是任務控制代碼的判斷,才知道哪個任務在執行,哪個任務被掛起。下一個要執行的任務是哪個等等,靠的都是任務控制代碼。
那麼要使用這些東西,我們肯定要實現啦,下面就是實現的定義,要定義優先順序,堆疊大小,任務控制代碼,任務函式等。
```js
//任務優先順序
#define LED_TASK_PRIO 2
//任務堆疊大小
#define LED_STK_SIZE 50
//任務控制代碼
TaskHandle_t LED_Task_Handler;
//任務函式
void LED_Task(void *pvParameters);
```
建立任務後,可以開啟任務排程了,然後系統就開始執行。
```js
xTaskCreate((TaskFunction_t )LED_Task, //任務函式
(const char* )"led_task", //任務名稱
(uint16_t )LED_STK_SIZE, //任務堆疊大小
(void* )NULL, //傳遞給任務函式的引數
(UBaseType_t )START_TASK_PRIO, //任務優先順序
(TaskHandle_t* )&LED_Task_Handler);//任務控制代碼
vTaskStartScheduler(); //開啟任務排程
```
這個建立任務的函式 xTaskCreate 是有返回值的,其返回值的型別是BaseType_t。
我們在描述中看看:
```js
// @return pdPASS if the task was successfully created and added to a readylist, otherwise an error code defined in the file projdefs.h
```
我們其實可以在任務排程的時候判斷一下返回值是否為pdPASS從而知道任務創是否建成功。並且列印一個資訊作為除錯。因為後面使用訊號量這些的時候都要知道訊號量是否建立成功,使得程式碼健壯一些。免得有隱藏的bug。
然後就是具體實現我們的任務LED_Task是在做什麼的
當然可以實現多個任務。還是很簡單的。
```js
//LED任務函式
void LED_Task(void *pvParameters)
{
while(1)
{
LED0 = !LED0;
vTaskDelay(1000);
}
}
```
這就是一個簡單的作業系統的概述。
下一篇,應該是講述開啟任務排程與任務切換的具體過程。
這個可以參考野火的書籍《從 0 到 1 教你寫 uCOS-III》

更多資料歡迎關注“物聯網IoT開發”公