
ORB-SLAM2 論文&程式碼學習 ——Tracking 執行緒
轉載請註明出處,謝謝
原創作者:MingruiYu
原創連結:https://www.cnblogs.com/MingruiYu/p/12352960.html
本文要點:
- ORB-SLAM2 Tracking 執行緒 論文內容介紹
- ORB-SLAM2 Tracking 執行緒 程式碼結構介紹
寫在前面
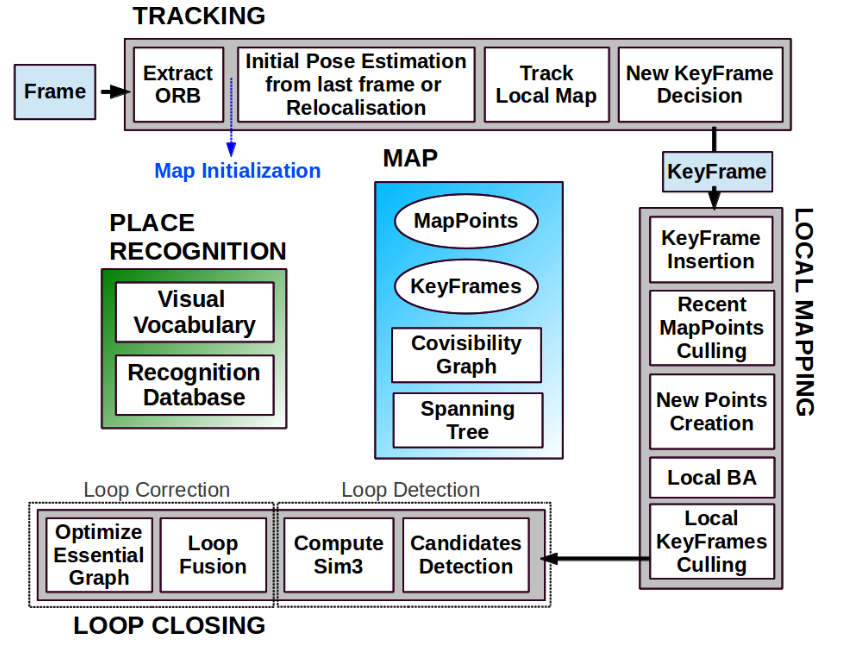
上一篇文章中我們已經對 ORB-SLAM2 系統有了一個概覽性的瞭解。通過我繪製的詳細的思維導圖形式的程式導圖,我們也可以很清晰地看出各個執行緒之間的關係,以及它們是如何和論文中的 System Overview 圖對應上的。
依舊祭出該圖,方便檢視:
也再次獻上我繪製的程式導圖全圖:ORB-SLAM2 程式導圖
從這篇文章開始,我們將會進入 ORB-SLAM2 的每個部分,學習 ORB-SLAM2 每個部分的具體結構和邏輯。Tracking 執行緒是 ORB-SLAM2 系統的主執行緒,每一幀影象送入後也會先經過 Tracking 執行緒的處理。所以這篇文章,我們先來看看 Tracking 執行緒的具體工作。
老規矩,還是分兩部分:以 ORB-SLAM 論文為參考 和 以 ORB-SLAM2 程式碼(程式導圖)為參考。
以 ORB-SLAM 論文為參考
首先,來看看論文中對 Tracking 執行緒的介紹。
Tracking 執行緒的主要工作如下:
- 對於新讀取的幀,提取 ORB 特徵
- (系統初始化)
- 當前幀位姿初值估計(根據上一幀 + motion-only BA,或進行重定位)
- 區域性地圖跟蹤
- 對上一步得到的位姿初值進行進一步 BA 優化
- 區域性地圖:指 Covisibility Graph 中附近的 KFs 及其 MapPoints 所組成的區域性的地圖
- 決定是否將當前幀作為關鍵幀插入 LocalMapping 執行緒
下面我們具體來看這些內容。
注: Tracking 執行緒中很重要的一個工作是進行單目初始化,這一部分我會單獨寫一片文章來進行介紹,所以本文會暫時跳過單目初始化的具體內容。
ORB 特徵提取
ORB-SLAM2 系統採用 ORB 特徵作為貫穿整個系統使用的特徵提取和描述方式。其優勢在於,提取速度快(大幅快於 SIFT 和 SURF,但其實 ORB 特徵的提取還是整個系統中最耗時的部分)。關於 ORB 特徵的詳細內容可見論文:ORB: An efficient alternative to SIFT or SURF PDF。
ORB 特徵具有旋轉不變性,但沒有尺度不變性。為了減小尺度變化對於 ORB 特徵的影響,ORB-SLAM 採用尺度金字塔的方式,將影象放大或縮小形成不同尺度(共8個,每個尺度之間的縮放比例為1.2),之後再在每個尺度的影象上都提取一遍 ORB 特徵(提出 ORB 特徵會帶有一個標記,標記其是從哪個尺度提取出來的),將每個尺度提取出的 ORB 特徵彙總在一起,就成為了該影象提取的 ORB 特徵。
為了儘可能使得 提取的 ORB 特徵在影象上分佈均勻(ORB 特徵提取本身存在一個問題,其在影象上分佈不均,經常有的區域性一大堆特徵點,有的區域性沒有特徵點),ORB-SLAM 將每個尺度的影象,劃分成一個個小格格(切蛋糕了),在每個小格格上提取至少5個特徵點。如果提取不出5個特徵點,就將提取特徵的閾值放低一些。
提取的 ORB 特徵在 ORB-SLAM 系統中相當重要,會貫穿整個系統,用於所有的特徵匹配。
當前幀位姿初值估計
Tracking 執行緒的目的之一是求出當前幀的位姿,其巧妙地將這個求解過程分為兩步,從粗到細。相對較粗的步驟 —— 當前幀位姿初值估計,在估計好一個初值後,會進入相對較細的步驟 —— 區域性地圖跟蹤,然後得到一個最終的位姿(當然在 LocalMapping 執行緒中還要繼續優化)。
首先來看這個相對較粗的步驟 —— 相機位姿初值估計。其有三種可能的估計方式,論文裡提到了兩種:根據上一幀和運動模型進行估計(上一幀跟蹤成功) 和 通過全域性重定位估計(上一幀跟蹤丟失)。還有一種是根據 Reference KF 進行估計(雖然上一幀跟蹤成功,但因為種種原因,無法使用上一幀和運動模型進行估計),我們會在程式碼部分對其進行介紹。另外,在這一部分中,除了會估計當前幀的位姿外,還會將當前幀的 FeaturePoints 和 MapPoints 做一個初步的匹配。
根據上一幀和運動模型進行估計
如果上一幀跟蹤成功,就可以繼續正常的跟蹤。ORB-SLAM 系統假設了一個勻速運動模型,意思就是假設當前幀與上一幀之間的相對位姿變化量 = 上一幀和上上幀之間的相對位姿變化量。通過這個可以先估計出當前幀的一個位姿初值,根據這個位姿初值,將上一幀的 MapPoints 和當前幀的 FeaturePoints 進行匹配,之後根據匹配進行優化。(如果沒有找到足夠多的匹配,就要使用上面提到的 根據 Reference KF 進行估計的方法了)
重定位
如果上一幀跟蹤失敗了,沒有上一幀的位姿,肯定是無法通過上面的方法繼續跟蹤的,所以要進行重定位。重定位的含義就是從 KF Database 中尋找有沒有哪個 KF 與當前幀很相似,有的話可能當前幀就在那個 KF 附近,從而定位了當前幀。
尋找可能的 KF 並計算當前幀位姿的方法如下:根據當前幀的 FeaturePoints 計算當前幀的 BoW。通過當前幀的 BoW 與 KF Database 中的 KFs 的 BoW 進行匹配,初步篩選初一批 Candidate KFs,並將當前幀的 FeaturePoints 與 Candidate KFs 含有的 MapPoints 進行匹配。之後,RANSAC 迭代計算當前幀的位姿(通過 PnP 演算法求解)。注意,上述計算的目的之一是進一步篩選 Candidate KFs,所以根據每一個 Candidate KFs 都要計算出一個當前幀的位姿,直到找到一個合適的 Candidate KF,根據它計算出的當前幀位姿很合適(有足夠多的 inliers)。再對其進行進一步優化,再進行更多的 FeaturePoints 和 MapPoints 的匹配。如果再優化後這個位姿計算還很合適(有足夠多的 inliers),那就確定當前幀的位姿了,之後就可以繼續正常跟蹤了。
區域性地圖跟蹤
當在上一步中獲得了當前幀的位姿初值並且當前幀的 FeaturePoints 和 MapPoints 有了初步的匹配後,就會進入這個更精細的求解當前幀位姿的步驟 —— 區域性地圖跟蹤。
區域性地圖裡包括:
- 和當前幀有共同觀察到的 MapPoints 的 KFs
*上述 KFs 的 Covisible KFs - 它們含有的某些 MapPoints
- 該 MapPoint 可以投影到當前幀的畫幅內
- 該 MapPoint 的平均可視方向與當前幀的方向的夾角不大於60度
- 該 MapPoint 距離當前幀光心的距離在一定範圍內(範圍太大的話,ORB 特徵的尺度不變性很難保證,這樣匹配出錯的概率很大)
在計算得到區域性地圖的同時,還需要儘可能進一步地將區域性地圖的 MapPoints 與 當前幀還未匹配的 FeaturePoints 相匹配。最終,對該區域性地圖進行 BA 優化。
決定是否將當前幀作為 KeyFrame
如果當前幀比較重要,則會將其作為 KF 插入 Map 並送入 LocalMapping 執行緒。ORB-SLAM 的一個特點就是,其插入 KF 的條件很寬鬆,這樣會插入很多 KFs,而 ORB-SLAM 會在 LocalMapping 執行緒中對它們中冗餘的進行剔除。這樣的目的是不放過可能有用的幀,增強系統的魯棒性,以應對純旋轉等很難處理的相機運動。
雖然這個條件很寬鬆,但還是有條件的:
- 距離上一次重定位已經過去了超過20幀
- LocalMapping 執行緒正閒置,但如果已經有連續20幀內沒有插入過 KF 了,那麼 LocalMapping 執行緒不管忙不忙,都要插入 KF 了 (忙就給老子停下hhh)
- 當前幀至少追蹤了 50 個點(當前幀質量不能太差)
- 當前幀追蹤的點中不能有90%以上和其 Reference KF 相同(當前幀不能太冗餘)
以 ORB-SLAM2 程式碼(程式導圖)為參考
看完了論文,可能有點不好理解,畢竟用文字進行描述的難度是很高的,特別是 ORB-SLAM2 系統內部各部分之間的邏輯又是較為複雜的。Talk is cheap, give me code. 下面我們從 ORB-SLAM2 的程式碼出發,結合我繪製的 ORB-SLAM2 程式導圖,進一步加深對 Tracking 執行緒的理解。
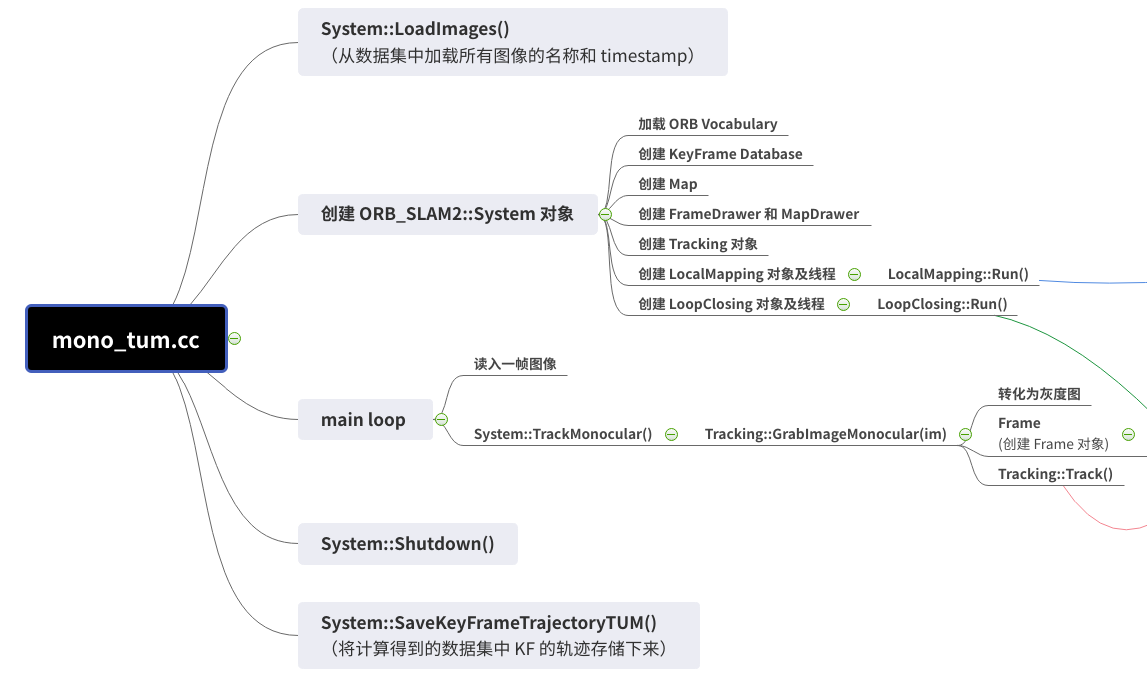
如上圖所示,在 System.cc 的主迴圈中,啟動了對於 Tracking 執行緒的呼叫。每次讀入一幀影象,為其建立 Frame 物件,在建立的同時就提起了 ORB 特徵。這裡有一個細節,在單目初始化時,對於該幀提取的 ORB 特徵數是平時的兩倍。
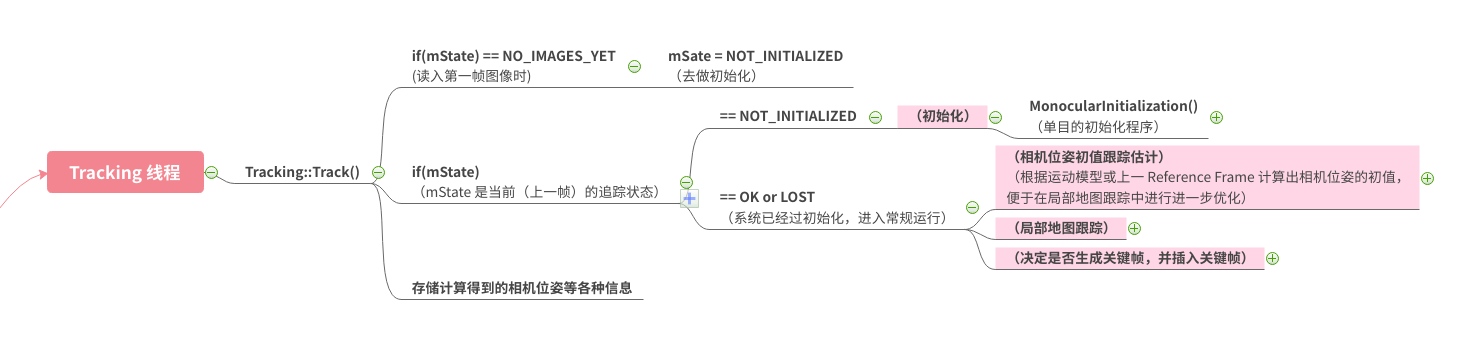
如上圖所示,進入 Tracking 執行緒中,可以看到一個很重要的狀態變數為 mState,根據它來區分當前系統的狀態。當系統還未初始化時,會執行 MonocularInitialization() 來進行初始化。關於這一部分會在後面的博文中專門介紹。
初始化之後,就會進入常規 Tracking 過程,其中首先進行當前幀位姿,之後進行區域性地圖跟蹤,再之後決定是否生成 KF,並插入 KF。下面我們一個部分一個部分來看。
因為這些地方實在不好截圖,請大家點選這張導圖的連結 (在文首)來檢視清晰大圖吧。
注:
ORB-SLAM2 系統有兩種模式(可以由使用者手動切換),其以 mbOnlyTracking 變數進行區分:
- SLAM 模型:所有執行緒都正常工作
- Localization 模式:只有 Tracking 執行緒工作,其它執行緒均不工作
同時,Localization 模式中也有兩種情況(系統自動判定,根據當前跟蹤情況自動切換),其以 mbVO 變數進行區分:
- VO 情況:Visual Odometry,上一幀追蹤到的點大部分是 VO 點(未能與 MapPoints 匹配(此處存疑)),此時不會進入區域性地圖跟蹤,直到重定位成功,具體後面細說。
- 正常情況:常規,所有部分正常執行。
當前幀位姿初值估計
如果是 SLAM 模式,則首先根據 mState 判斷系統之前的跟蹤狀態。如果之前跟蹤丟失,則要不斷進行重定位 Tracking::Relocalization(),直到當前幀與 KF Database 中的某個 KF 匹配上了。如果之前跟蹤正常,則繼續跟蹤,一般來說使用 Tracking::TrackWithMotionMode() 進行估計,但如果運動模型還未建立,或者剛剛進行了重定位,則使用 Tracking::TrackReferenceKeyFrame() 進行估計。TrackReferenceKeyFrame() 指當前幀和其 Reference KF 進行匹配來估計位姿,其匹配的搜尋量會大很多,所以當 Tracking::TrackWithMotionMode() 不行的時候才會用它。
具體的位姿估計方式都是 匹配 + 優化。只是匹配的方式會有所不同:
- Tracking::TrackReferenceKeyFrame() 是根據 BoW 來在當前幀所有提取出的 FeaturePoints 和 Reference Frame 的 MapPoints 中進行匹配(當然使用 BoW 有可以減少計算量的方法);
- Tracking::TrackWithMotionMode() 中是有了位姿初值,所以可以根據該初值進行投影,將上一幀的 MapPoints 先投影至當前幀的一個大概區域,從而縮小了搜尋的區域大小,減小了搜尋量。
如果是 Localization 模式,那麼如果之前系統跟蹤丟失,同樣不斷進行重定位 Tracking::Relocalization()。如果之前系統跟蹤正常,與 SLAM 模式不同的地方在於,其會判斷當前處於 VO 情況還是正常情況:
- 正常情況:與 SLAM 模式基本一致,根據運動模式是否已經建立而採用 Tracking::TrackWithMotionMode() 或 Tracking::Relocalization()。
- VO 情況:與 SLAM 模式不一樣了,此時進行 Tracking::TrackWithMotionMode() 和 Tracking::Relocalization(),優先使用 Relocalization() 的結果(此時重定位的結果更可靠一些),如果重定位失敗,則採用 Tracking::TrackWithMotionMode() 繼續跟蹤甚至直接丟失,如果重定位成功,則可以推出 VO 模型回到正常模式。
區域性地圖跟蹤
只有 SLAM 模式下,且上一步當前幀位姿初值估計成功(有位姿初值了)的情況下才會進行區域性地圖跟蹤。
在區域性地圖跟蹤優化後,會判斷優化的效果如何,如果效果可以的話,才會判斷本次跟蹤成功(當前幀位姿初值估計 + 區域性地圖跟蹤 都成功才算成功),否則本次跟蹤丟失。
決定是否生成關鍵幀,並插入關鍵幀
如果當前幀丟失的話,那肯定是不會將其作為 KF 插入的。但剛初始化完沒幾幀就丟失了,說明初始化的質量不行,系統 Reset,重新初始化。(從中可以看出,ORB-SLAM2 對於初始化的質量標準很高,所以也經常出現在實際中其遲遲不肯啟動的狀況)。
如果當前幀跟蹤成功,更新運動模型,且根據論文中的標準決定當前幀是否作為 KF 插入 Map,並送入 LocalMapping 執行緒。
ORB-SLAM2 系列博文
ORB-SLAM2 初體驗 —— 配置安裝
ORB-SLAM2 論文&程式碼學習 —— 概覽
ORB-SLAM2 論文&程式碼學習 —— Tracking 線