
JUC併發程式設計基石AQS之主流程原始碼解析
阿新 • • 發佈:2020-04-26
## 前言
由於AQS的原始碼太過凝練,而且有很多分支比如取消排隊、等待條件等,如果把所有的分支在一篇文章的寫完可能會看懵,所以這篇文章主要是從正常流程先走一遍,重點不在取消排隊等分支,之後會專門寫一篇取消排隊和等待條件的分支邏輯。讀原始碼千萬別在每個程式碼分支中來回遊走,先按一個正常的分支把流程看明白,之後再去重點關注其他分支,各個擊破。我相信看完正常流程,你再去分析其他分支會更加得心應手。本篇將主要方法名都做了目錄索引,檢視時可通過目錄快速跳到指定方法的邏輯。
## 執行流程
AQS的執行流程大體為當執行緒獲取鎖失敗時,會加入到等待佇列中,在**等待佇列**中的執行緒會按照從頭至尾的順序依次再去嘗試獲取鎖執行。
當執行緒獲取鎖後如果還需要等待特定的條件才能執行,那麼執行緒就加入到**條件佇列**排隊,當等待的條件到來時**再從條件佇列中按照從頭至尾的順序加入到等待佇列**中,然後再按照等待佇列的執行流程去獲取鎖。所以AQS最核心的資料結構其實就兩個佇列,等待佇列和條件佇列,然後再加上一個獲取鎖的同步狀態。
## AQS資料結構
AQS最核心的資料結構就三個
- **等待佇列**
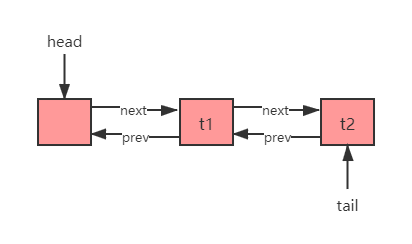
原始碼中head和tail為等待佇列的頭尾節點,在通過前後指向則構成了等待佇列,為雙向連結串列,學名為CLH佇列。

- **條件佇列**
ConditionObject中的firstWaiter和lastWaiter為等待佇列的頭尾節點,然後通過next指向構成了條件佇列,是個單向連結串列。

- **同步狀態**
state為同步狀態,通過CAS操作來實現獲取鎖的操作。
```java
public abstract class AbstractQueuedSynchronizer{
/**
* 等待佇列的頭節點
*/
private transient volatile Node head;
/**
* 等待佇列的尾節點
*/
private transient volatile Node tail;
/**
* 同步狀態
*/
private volatile int state;
public class ConditionObject implements Condition, java.io.Serializable {
/** 條件佇列的頭節點 */
private transient Node firstWaiter;
/** 條件佇列的尾節點 */
private transient Node lastWaiter;
}
}
```
### Node節點
兩個佇列中的節點都是通過AQS中內部類Node來實現的。主要欄位:
- waitStatus
當前節點的狀態,具體看原始碼列出的註釋。很重要,之後會在原始碼中講解。
- Node prev
等待佇列節點指向的前置節點
- Node next
待佇列節點指向的後置節點
- Node nextWaiter
條件佇列中節點指向的後置節點
- Thread thread
當前節點持有的執行緒
```java
static final class Node {
/** */
static final Node SHARED = new Node();
/** */
static final Node EXCLUSIVE = null;
/** 標明當前節點執行緒取消排隊 */
static final int CANCELLED = 1;
/** 標明該節點的後置節點需要自己去喚醒 */
static final int SIGNAL = -1;
/** 標明當前節點在等待某個條件,此時節點在條件佇列中 */
static final int CONDITION = -2;
/**
* waitStatus value to indicate the next acquireShared should
* unconditionally propagate
*/
static final int PROPAGATE = -3;
/**
* 等待狀態,值對於上面的四個常量
*/
volatile int waitStatus;
/**
* 等待佇列節點指向的前置節點
*/
volatile Node prev;
/**
* 等待佇列節點指向的後置節點
*/
volatile Node next;
/**
* 當前節點持有的執行緒
*/
volatile Thread thread;
/**
* 條件佇列中節點指向的後置節點
*/
Node nextWaiter;
```
## 加鎖
上面說明的資料結構我們先大致有個印象,現在通過加鎖來一步步說明下具體的流程,上篇文章**JUC併發程式設計基石AQS之結構篇**,我們知道了AQS加鎖程式碼執行的是acquire方法,那麼我們從這個方法說起,從原始碼中看出執行流程為:tryAcquire——>addWaiter——>acquireQueued
tryAcquire為自己實現的具體加鎖邏輯,當加鎖失敗時返回false,則會執行addWaiter,將執行緒加入到等待佇列中,Node.EXCLUSIVE為獨佔鎖的模式,即同時只能有一個執行緒獲取鎖去執行。
**例子說明**

首先假設有四個執行緒t0-t4呼叫tryAcquire獲取鎖,t0執行緒為天選之子獲取到了鎖,則t1-t4執行緒接著去執行addWaiter。
### acquire
```java
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
```
### addWaiter分支1
addWaiter方法,首先會初始化一個node節點,將當前執行緒設定到node節點中。然後判斷head和tail節點是否為空,head和tail節點是懶載入的,當AQS初始化時為null,則第一次進來時if (pred != null) 條件不成立,執行enq方法。
**例子說明**
假如t1和t2執行緒同時執行到該方法,head節點未初始化則執行enq。
```java
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
```
### enq
此時可能多個執行緒會同時呼叫enq方法,所以該方法中也使用CAS操作。for (;;)是個死迴圈,首先會CAS操作初始化head節點,且**head節點是個空節點,沒有設定執行緒。**然後第二次迴圈時通過CAS操作將該節點設定我尾部節點,並將前置節點指向head,之後會跳出迴圈,返回生成的Node節點到addWaiter,從原始碼可以看到addWaiter方法後面沒有邏輯,之後會呼叫acquireQueued。
**例子說明**
t1和t2執行緒同時執行,t1執行緒上天眷顧CAS成功,則流程為
- 初始化head

- t1執行緒的node節點加入等待佇列

- t2執行緒執行,node節點加入等待佇列
```java
private Node enq(final Node node) {
for (;;) {
Node t = tail;
if (t == null) { // Must initialize
if (compareAndSetHead(new Node()))
tail = head;
} else {
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
```
### addWaiter分支2
現在在來說t3和t4,t3和t4執行緒這時終於獲取到了cpu的執行權,此時head節點已經初始化,則進入條件中的程式碼,其實也是通過CAS操作將節點加入到等待佇列尾部,之後會呼叫acquireQueued。
**例子說明**
假如t3執行緒先CAS成功,之後t4成功,此時的資料結構為

```java
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
```
### acquireQueued
這個方法有兩個邏輯,首先如果該節點的前置節點是head會走第一個if,再次去嘗試獲取鎖???
獲取鎖成功,則將頭節點設定為自己,並返回到acquire方法,此時acquire方法執行完,代表獲取鎖成功,執行緒可以執行自己的邏輯了。這裡有下面幾個注意點
- p.next = null; // help GC 設定舊的head節點的後置節點為null
- setHead方法 將t1節點設定為頭節點,因為頭節點是個空節點,所以設定t1執行緒節點執行緒為null,設定t1前置節點為null,此時舊的head節點已經沒有任何指向和關聯,可以被gc回收,所以上面那一步會寫個help GC 的註釋。
**例子說明**
現在t1執行緒的前置節點為頭結點,如果t1執行tryAcquire成功則結果為

當獲取鎖失敗或者前置節點不是頭節點都會走第二個if邏輯,首先會判斷當前執行緒是否需要掛起,如果需要則執行執行緒掛起。
```java
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
private void setHead(Node node) {
head = node;
node.thread = null;
node.prev = null;
}
```
### shouldParkAfterFailedAcquire
判斷執行緒是否需要掛起,首先需要注意的是這個方法的引數是當前節點的前置節點。當執行緒需要掛起的時候,它需要把身後事安排明白,掛起後讓誰來把我喚醒。這個方法就主要做這個操作。我們再來看Node節點中的waitStatus狀態,這個狀態有一個Node.SIGNAL=-1,**代表了當前節點需要將後置節點喚醒**。這個理解可能有點繞。首先我們要理解一點,如果我需要被喚醒,那麼我就要設定我們的前置節點的狀態為Node.SIGNAL,這樣當我的前置節點發現waitStatus=Node.SIGNAL時,它才知道,我執行完後需要去喚醒後置節點讓後置節點去執行。所以這個方法是**當前節點去設定自己的前置節點的狀態為Node.SIGNAL**。
waitStatus初始化後是0,
第一次進入該方法,發現自己的前置節點不是Node.SIGNAL,需要先設定為Node.SIGNAL狀態
第二次進入時發現前置節點已經是Node.SIGNAL狀態,那麼我就可以安心的掛起了,有人會喚醒我的。
所以這個方法其實是兩個邏輯,先設定前置節點狀態,再判斷是否可以掛起。因為前面acquireQueued方法中for (;;) 也是個迴圈,所以會重複進入。
```java
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
/*
* This node has already set status asking a release
* to signal it, so it can safely park.
*/
return true;
if (ws > 0) {
/*
* Predecessor was cancelled. Skip over predecessors and
* indicate retry.
*/
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we
* need a signal, but don't park yet. Caller will need to
* retry to make sure it cannot acquire before parking.
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
```
### parkAndCheckInterrupt
將自己的前置節點設定為可喚醒的狀態後進入該方法,執行緒掛起。
**例子說明**
此時t2-t4執行緒都執行到了此方法,則t2-t4執行緒都已經掛起不再執行,並且**head-t3**節點的waitStatus都為Node.SIGNAL,因為t4沒有後置節點。

```java
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
```
## 解鎖
### release
解鎖方法的入口是AQS的release方法,首先會呼叫tryRelease方法,這個是AQS實現類自己實現的方法,去CAS改變state狀態,如果解鎖成功,則會進入if裡的程式碼,獲取head節點,判斷waitStatus!=0,如果等於0代表沒有後置節點需要去喚醒。之後呼叫unparkSuccessor方法。
```java
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
```
waitStatus>0時,代表為CANCELLED = 1狀態,即執行緒取消排隊,這個以後會細講。先將頭結點的waitStatus狀態設為初始值0,之後檢視後置節點的狀態,如果>0代表後置節點取消了排隊,不需要喚醒。但是當前節點需要去喚醒後續的節點讓後續節點再去執行,所以會從尾結點開始尋找找到離當前執行緒最近的一個且waitStatus<0的去喚醒。之後會呼叫LockSupport.unpark(s.thread);取消後續節點的掛起,讓後續節點繼續執行。
### unparkSuccessor
```java
private void unparkSuccessor(Node node) {
int ws = node.waitStatus;
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
Node s = node.next;
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
if (s != null)
LockSupport.unpark(s.thread);
}
```
**例子說明**
此時等待佇列的資料,當t0執行緒執行完成後執行解鎖操作,此時所有等待的執行緒都沒有取消等待。

則t0執行緒會喚醒t1執行緒

如果t1和t3執行緒取消的排隊時,t0執行緒會喚醒t2,**從後往前找離head最近的一個沒有取消派對的節點**。

執行緒執行到parkAndCheckInterrupt方法時被掛起,當被頭節點喚醒後會繼續執行,設定interrupted=true,表示被中斷,會繼續執行for迴圈邏輯,到現在一個正常的獲取鎖失敗——>加入等待佇列——>掛起——>被喚醒繼續執行的流程已經整體走了一遍。
本篇文章都是自己根據原始碼寫出的閱讀心得,可能有的地方沒有揣摩到Doug Lea大神的意圖,如果有理解不對的地方歡迎一起探討。
**如有不實,還望