
AbstractQueuedSynchronizer(AQS)抽絲剝繭深入瞭解JUC框架原理
阿新 • • 發佈:2020-07-10
[TOC]
# 簡介
AQS(AbstractQueuedSynchronizer)是併發開發中一個基礎元件。主要實現了同步狀態管理、執行緒佇列管理、執行緒等待、執行緒喚醒等底層操作。JDK中許多的併發類都是依賴AQS的。 ReentrantLock(可重入鎖)、Semaphore(訊號量)、CountDownLatch(計數器)。
# Lock簡單實用
- 介紹原理前我們簡單來看看Lock使用。
```java
public static void main(String[] args) {
Integer index = 0;
ReentrantLock lock = new ReentrantLock();
List threadList = new ArrayList<>();
for (int i = 0; i < 100; i++) {
int finalI = i;
Thread thread = new Thread(new Runnable() {
@Override
public void run() {
try {
Thread.sleep(new Random().nextInt(100));
} catch (InterruptedException e) {
e.printStackTrace();
}
lock.lock();
System.out.println(finalI);
lock.unlock();
}
});
threadList.add(thread);
}
for (Thread thread : threadList) {
thread.start();
}
}
```
- 就是lock 和unlock的使用。就能夠保證中間的業務是有序執行的。上面不會保證輸出數字有序,但是能保證輸出的個數是100個,因為這裡我們理解成他們會進入佇列中。但是進入的順序不確定。那麼下面我們看看lock 、unlock 與我們今天的主角AQS有什麼關係。
## 主體框架
AQS提供了一個依賴FIFO(先進先出)等待佇列的阻塞鎖和同步器的框架。該類是一個抽象類。其中暴露出來的方法主要用來操作狀態和類別判斷。這些方法我們不需要考慮阻塞問題,因為在AQS中呼叫這些方法的地方會處理阻塞問題
|方法|描述|
|---|---|
|boolean tryAcquire(int args)|嘗試獲取獨佔鎖|
|boolean tryRelease(int args)|嘗試釋放獨佔鎖|
|int tryAcquireShared(int args)|嘗試獲取共享鎖|
|boolean tryReleaseShared(int args)|嘗試釋放共享鎖|
|boolean isHeldExclusively()|當前執行緒是否獲得了獨佔鎖|
其他方法有AQS類實現。在AQS中實現的方法會呼叫到上面的抽象方法。正常子類是已內部類方式呈現的。這樣的好處可以做到封閉式的同步屬性。AQS內部實現的方法大概介紹
|方法|描述|
|---|---|
|void acquire(int args)|獲取獨佔鎖,內部呼叫tryAcquire方法,|
|void acquireInterruptibly(int args)|響應中斷版本的acquire|
|boolean tryAcquireNanos(int args , long nanos)|響應中斷+超時版本的acquire|
|void acquireShared(int args)|獲取共享鎖,內部呼叫tryAcquireShared方法|
|void acquireSharedInterruptibly(int args)|響應中斷版本的獲取共享鎖|
|boolean tryAcquireSharedNonos(int args,long nanos)|響應中斷+超時獲取共享鎖|
|boolean release(int args)|釋放獨佔鎖|
|boolean releaseShared(int args)|釋放共享鎖|
|Collection getQueuedThreads()|獲取同步佇列上的執行緒集合|
# 原理解析
AQS內部是通過一個雙向連結串列來管理鎖的(俗稱CLH佇列)。
當前程嘗試獲取鎖失敗時,會將當前執行緒包裝成AQS內部類Node物件加入到CLH佇列中,並將當前執行緒掛起。當有執行緒釋放自己的鎖時AQS會嘗試喚醒CLH佇列中head後的直接後繼的執行緒。AQS的status我們可以根據他來做成不同的需求。這個後續再說。下面我們已ReentrantLock來說明下AQS原理。
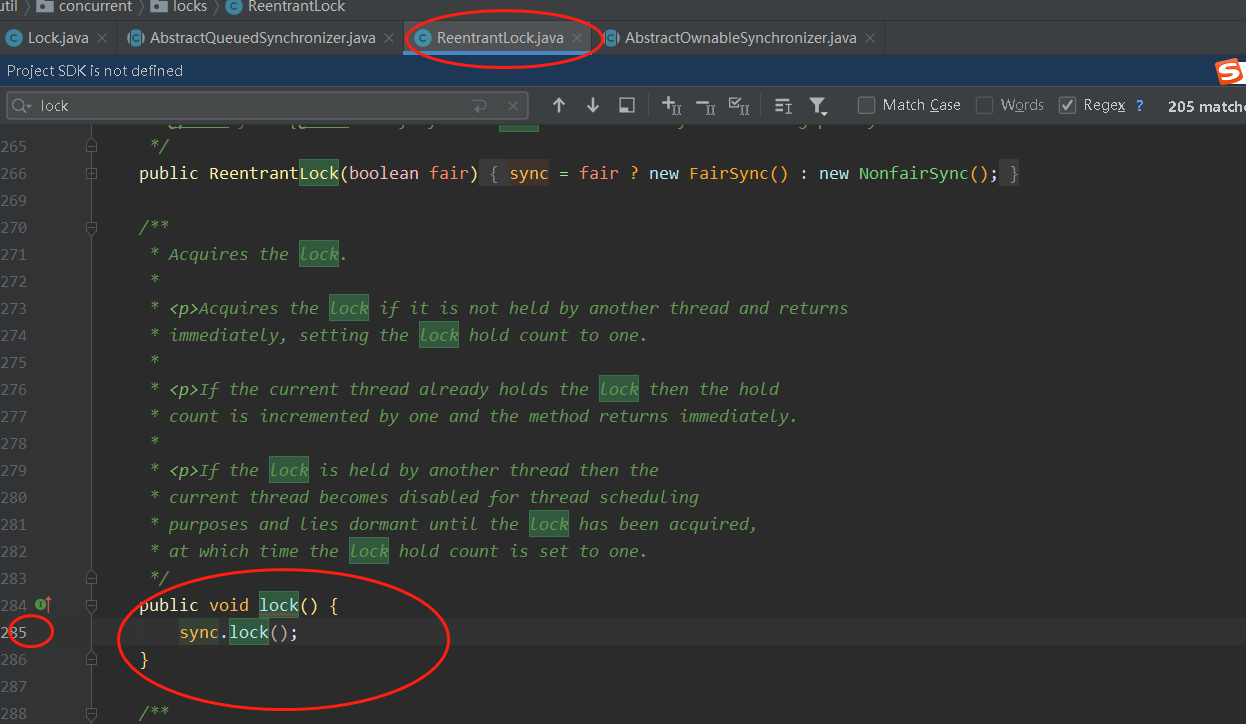
- 上面標註的是ReentrantLock中的lock方法。這個方法表示去上鎖。瞭解Lock的都知道這個方法會一直阻塞住知道上鎖成功才會執行完。而ReentrantLock.lock方法實際上的sync物件去上鎖的。而sync在ReentrantLock中有公平鎖和非公平鎖兩種。
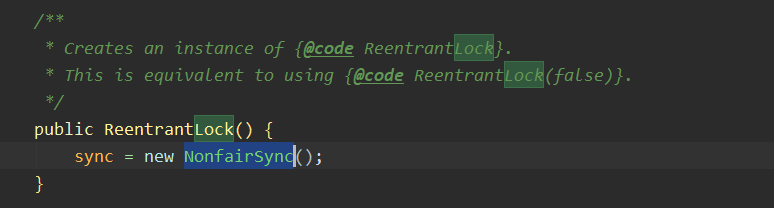
- 在AQS中預設的是非公平鎖,即隨機喚醒執行緒。

- 通過上面繼承關係我們發現了我們今天的主角-AbstractQueueSynchronizer 。
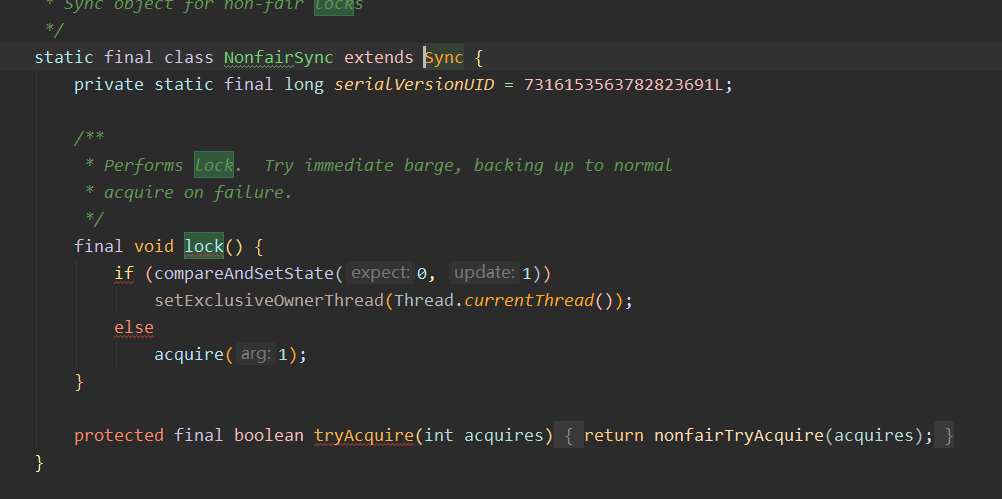
- NonfairSync實現了兩個方法lock、tryAcquire方法。其中lock就是通過狀態位實現鎖機制的。0-未上鎖;1-已上鎖 。 lock的邏輯就是如果上鎖成功會將狀態置為1且設定獨佔模式的所屬執行緒為當前執行緒。否則呼叫acquire嘗試獲取鎖。
# 獨佔鎖
### AQS資料結構
- AQS裡面主要是狀態位的管理。下面我們看看包含的屬性
```java
Class AbstractQueuedSynchronizer{
/*佇列中的頭結點,無實際意義,head的後繼節點才是佇列中的第一個節點*/
private transient volatile Node head;
/*佇列中的尾節點*/
private transient volatile Node tail;
/*佇列中的狀態,上鎖解鎖 可以擴充套件成不同的狀態 。 AQS實際上也是對該欄位的管理。子類中通過get set compare方法對state的管理*/
private volatile int state;
}
```
### CLH資料結構
- 上面我們瞭解到會將執行緒包裝成Node物件加入到雙向連結串列(CLH)中。下面我們看看Node的結構吧
```java
static final class Node {
/*共享模式的標記*/
static final Node SHARED = new Node();
/*獨佔模式的標記*/
static final Node EXCLUSIVE = null;
/*佇列等待狀態-取消*/
static final int CANCELLED = 1;
/*佇列等待狀態-喚醒*/
static final int SIGNAL = -1;
/*佇列等待狀態-條件等待*/
static final int CONDITION = -2;
/*佇列等待狀態-廣播*/
static final int PROPAGATE = -3;
/*佇列等待狀態,取值範圍就是上面的等待狀態之一*/
volatile int waitStatus;
/*前驅節點*/
volatile Node prev;
/*後繼節點*/
volatile Node next;
/*節點對應的執行緒:繫結關係*/
volatile Thread thread;
/*TODO*/
Node nextWaiter;
/*判定是否是共享模式*/
final boolean isShared() {
return nextWaiter == SHARED;
}
/*獲取當前節點的前驅節點,如果沒有前驅節點丟擲NullPointerException*/
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
/*用於建立雙向連結串列中的Head節點,其實Head節點就是一個標誌並不會與執行緒掛鉤。相當於一個佇列的預設頭節點。或者用來建立共享模式的節點。因為共享模式的節點就是無參構造*/
Node() {
}
/*將執行緒包裝成Node物件加入佇列中,原始碼中是用來新增Thread至佇列*/
Node(Thread thread, Node mode) {
this.nextWaiter = mode;
this.thread = thread;
}
/*常用語加入條件狀態佇列中TODO*/
Node(Thread thread, int waitStatus) {
this.waitStatus = waitStatus;
this.thread = thread;
}
}
```
## acquire實現步驟
- 上面我們瞭解到Lock中實現lock的底層是AQS的acquire實現的。
- 通過檢視原始碼我們大概能瞭解到其上鎖的流程,
+ 首先嚐試獲取鎖
+ 獲取鎖失敗後,將當前執行緒包裝成Node物件新增到CLH佇列中
+ 自行阻塞當前執行緒,等待佇列喚醒自己
```java
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
```
### addWaiter
```java
/**
* 通過Node物件的建構函式構造Node物件新增到CLH佇列中
* 這個方法主要是雙向連結串列的操作。C++的同學應該會很容易理解
*/
private Node addWaiter(Node mode) {
/*當前執行緒加入佇列後此時是沒有後繼節點的,且已獨佔模式訪問的
*所以這裡加入的Node在上一不傳入的是Node.EXCLUSIVE,這裡就表示
*是已獨佔模式進行上鎖從而進行加入佇列的
*/
Node node = new Node(Thread.currentThread(), mode);
/*獲取佇列中的最後一個Node節點;這裡是進行快速插入測試。
*預設佇列已經在堆積Node節點了這個時候直接將節點追加到tail裡。
*其實這裡和enq()方法是一樣的邏輯。只不過enq裡面會進行等待佇列
*正常才會加入
*/
Node pred = tail;
if (pred != null) {
/*佇列已經產生執行緒等待就會將當前node節點的前驅節點只為tail
*的複製節點
*/
node.prev = pred;
/*基於CAS(內部UnSafe實現)設定尾部為node節點*/
if (compareAndSetTail(pred, node)) {
/*原本的tail節點的後繼節點自然就是node節點*/
pred.next = node;
/*到這裡node節點就已經加入了CLH佇列中*/
return node;
}
}
/*邏輯同上,不在贅述*/
enq(node);
return node;
}
```
### acquireQueued
- 這裡傳的Node是我們上一步剛剛新增到隊尾的節點。為什麼不直接用tail節點呢?我們仔細觀察發現tail的修飾
```java
private transient volatile Node tail;
```
- 我們知道`volatile`是記憶體可見的。什麼叫記憶體可見。我們的屬性變數是儲存在記憶體中的。每次有執行緒啟動訪問這個類的時候都會複製記憶體中屬性值到自己執行緒中。所以在多執行緒情況下修改了這個屬性就會出現問題因為A執行緒修改了值但是B執行緒並無法感知還是以原先的值進行互動。這就是典型的多執行緒帶來的問題。而`volatile`做到了的執行緒感知。當A執行緒修改了tail後立馬B執行緒就感知到了。但是這並不能徹底的解決多併發的問題。這裡我們簡單介紹下這個關鍵字
- 經過上面簡單闡述高併發場景,所以這裡不能直接用tail。因為這個時候tail很有可能已經不是我們的tail的。這裡直接傳遞Node節點是非常明智的選擇。而且是final修飾的。更加保證了使我們上一步驟新增到隊尾的那個節點
```java
/**
* 再次嘗試獲取鎖,對中斷不敏感。
*/
final boolean acquireQueued(final Node node, int arg) {
/*失敗標誌位*/
boolean failed = true;
try {
/*執行緒是否被打斷標誌位*/
boolean interrupted = false;
/**/
for (;;) {
/*獲取當前想成包裝的Node節點的前驅節點*/
final Node p = node.predecessor();
/*如果前驅節點是head節點表示當前節點在隊首可以嘗試
*獲取下鎖,這裡為什麼是嘗試獲取呢因為這個時候可能鎖
*還被其他執行緒佔著。這裡嘗試獲取純粹就是試試機會
*/
if (p == head && tryAcquire(arg)) {
/*成功獲取到鎖,說明我們試一試的心態成功了。
*人生也一樣,總得試一試萬一成功了呢。看原始碼還
*能學到人生道理呢。劃重點
*/
/*這個時候在tryAcquire中已經被當前執行緒佔用了鎖了。
*我們這裡不需要擔心其他執行緒會搶佔,這個時候我們
*需要將當前執行緒從佇列中踢出,直接將當前執行緒置為
*head節點。setHead方法也很簡單,將node的前驅節
*點置為null,因為head是首位,首位之前不應該在
*有節點了,然後執行緒也被銷燬了
*/
setHead(node);
/*p節點是老的head節點這個時候已經不需要了。
*這裡jdk的操作是將next至為null, 這樣p節點
*就成為不可達狀態,接下來的命運就是等待被GC。
*這裡我們不是將p置為null的原因是我們p=null ,
*只是將p指向null, 但是原先的head的那個Node的
*地址任然通過Node進行指向,GC是無法回收的。好好理解下*/
p.next = null; // help GC
/*這裡我們已經獲取了。而且成功上了鎖。所以這裡就
* 無法取消獲取了,而且我們已經將Node剔除了,也
* 沒有必要再進行取消獲取操作了。所以在finnally中
* 就沒必要執行了*/
failed = false;
/*返回執行緒是否被中斷狀態*/
return interrupted;
}
/*如果當前執行緒對應的Node節點不是head的後繼節點或者
* 沒有獲取到鎖,這個時候我們開始阻塞執行緒*/
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
/*取消當前執行緒對應的Node節點在佇列中排隊。這裡可以
*理解成棄權操作。這裡取消會順便遍歷之前的節點如果
* 有棄權的這裡會一併操作掉
*/
cancelAcquire(node);
}
}
```
### shouldParkAfterFailedAcquire
```java
/**
* 在失敗獲取鎖的情況下判斷是否需要對執行緒進行阻塞並同意修改執行緒
* 在佇列中狀態。如果前驅節點是SIGNAL狀態那麼node節點就進入
* 準備狀態。前驅節點CANEL狀態需要剔除。如果是CONDITION或者
* PROGAGATE狀態,在ReentrantLock中我們暫時不考慮這兩者情況,
* 所以這裡就強制轉換為SIGNAL狀態
*/
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
/*獲取前驅節點的狀態*/
int ws = pred.waitStatus;
/*如果前驅節點是等待通知狀態,那麼當前節點需要等待前驅
* 結點被喚醒,所以這裡需要被阻塞
*/
if (ws == Node.SIGNAL)
return true;
/*如果前驅節點>0,即為canclled狀態*/
if (ws > 0) {
//這裡其實和cancelAcquire邏輯差不多,需要將取消的節點從佇列中剔除
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*剩下的情況,統一將節點狀態更正為等待通知狀態*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
```
### parkAndCheckInterrupt
```java
/**
* 阻塞當前執行緒,等待被喚醒
*/
private final boolean parkAndCheckInterrupt() {
/*這裡就是阻塞執行緒,並等待LockSupport.unpark喚醒*/
LockSupport.park(this);
/*在park之後我們需要Thread.interrupted恢復下執行緒的中斷狀態,
* 這樣下一次park才會生效。否則下一次的park不會生效的
*/
return Thread.interrupted();
}
```
### cancelAcquire
```java
/**
* 將node節點之前(包括當前node)取消狀態的全部剔除
*/
private void cancelAcquire(Node node) {
if (node == null)
return;
/*剔除操作需要解綁node和thread關係*/
node.thread = null;
/*獲取node的前驅節點*/
Node pred = node.prev;
/*大於0就是取消狀態*/
while (pred.waitStatus >