
Halcon一維測量官方案例解析
阿新 • • 發佈:2020-07-15
下面的例子簡要介紹瞭如何使用HALCON的一維測量工具。最長的部分是預處理和後處理;測量本身只包括兩個操作符呼叫。
# 測量保險絲-fuse
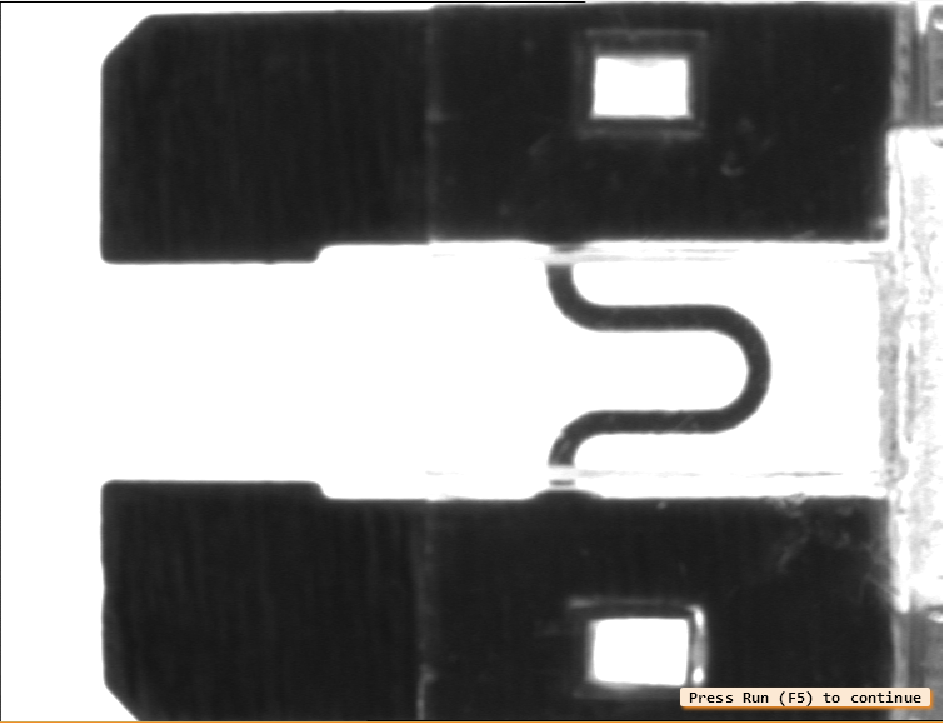
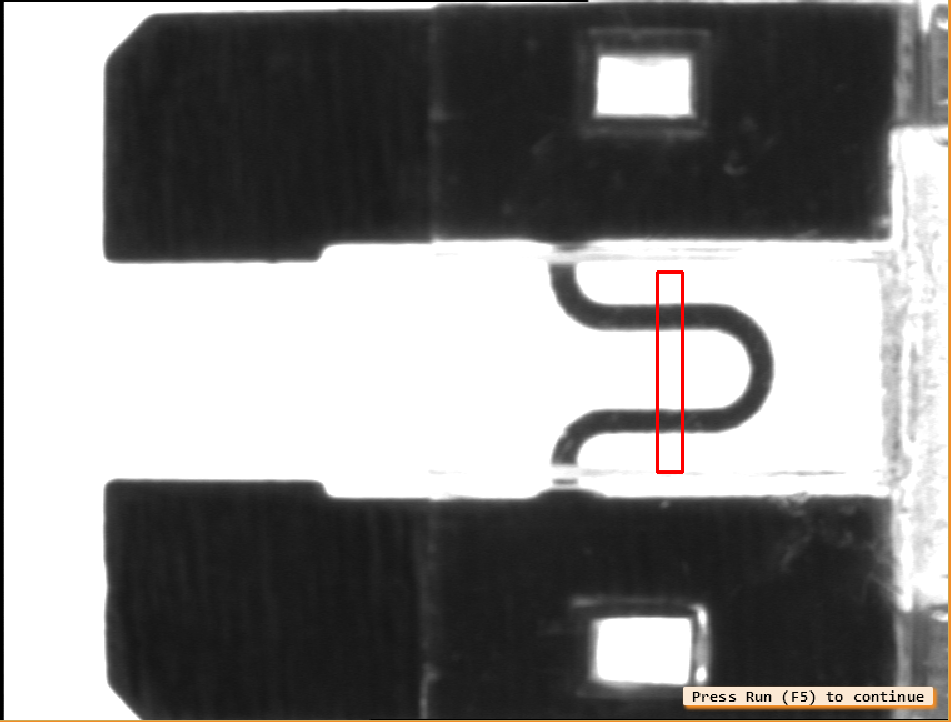
預處理主要是測量線的生成。在示例程式中,這個步驟是通過將測量物件的引數分配給變數來完成的。
```
read_image (Fuse, 'fuse')
Row := 297
Column := 545
Length1 := 80
Length2 := 10
Angle := rad(90)
gen_rectangle2 (ROI, Row, Column, Angle, Length1, Length2)
```
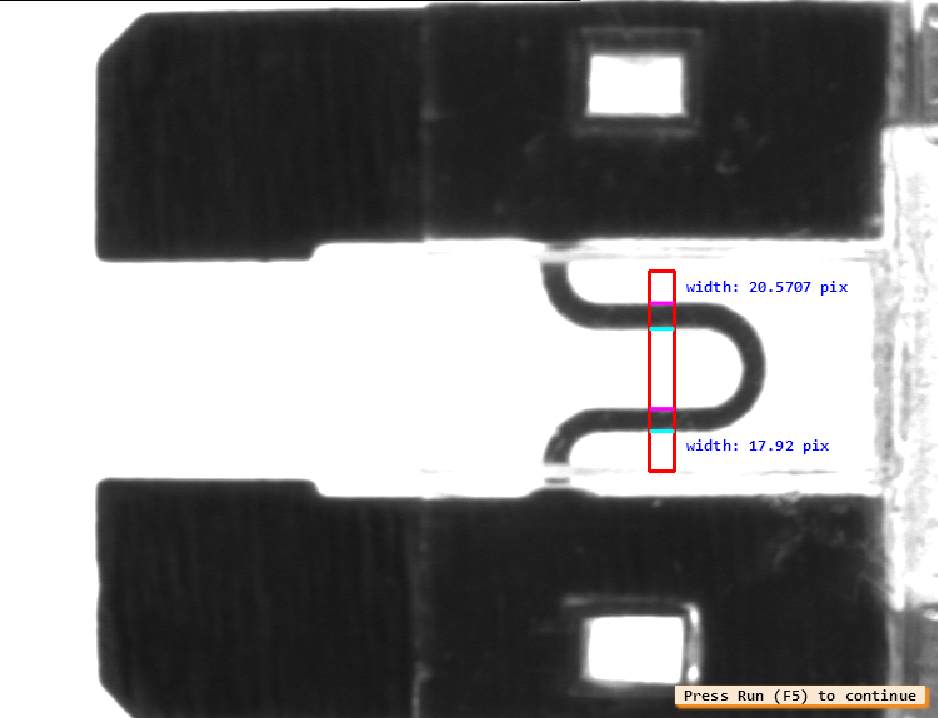
現在通過將測量物件應用到影象上進行實際測量。引數的選擇使得暗區周圍的邊緣被分為兩組線段,結果返回邊緣的位置和兩組線段的寬度和距離。
```
measure_pairs (Fuse, MeasureHandle, 1, 1, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance)
```
最後生成一個帶有測量線引數的區域,並將邊緣位置轉換為短XLD等值線來顯示結果。
```
for i := 0 to |RowEdgeFirst| - 1 by 1
gen_contour_polygon_xld (EdgeFirst, [-sin(Angle + rad(90)) * Length2 + RowEdgeFirst[i],-sin(Angle - rad(90)) * Length2 + RowEdgeFirst[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeFirst[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeFirst[i]])
gen_contour_polygon_xld (EdgeSecond, [-sin(Angle + rad(90)) * Length2 + RowEdgeSecond[i],-sin(Angle - rad(90)) * Length2 + RowEdgeSecond[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeSecond[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeSecond[i]])
dev_set_color ('cyan')
dev_display (EdgeFirst)
dev_set_color ('magenta')
dev_display (EdgeSecond)
dev_set_color ('blue')
if (i == 0)
set_tposition (WindowID, RowEdgeFirst[i] + 5, ColumnEdgeFirst[i] + 20)
else
set_tposition (WindowID, RowEdgeFirst[i] - 40, ColumnEdgeFirst[i] + 20)
endif
write_string (WindowID, 'width: ' + IntraDistance[i] + ' pix')
endfor
```
源程式
```
* fuse.hdev: 測量保險絲的寬度
*
dev_update_window ('off')
dev_close_window ()
* ****
* 採集影象
* ****
read_image (Fuse, 'fuse')
get_image_size (Fuse, Width, Height)
dev_open_window_fit_image (Fuse, 0, 0, Width, Height, WindowID)
set_display_font (WindowID, 12, 'mono', 'true', 'false')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Fuse)
set_display_font (WindowID, 12, 'mono', 'true', 'false')
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 建立測量物件
* ****
* -> specify ROI
Row := 297
Column := 545
Length1 := 80
Length2 := 10
Angle := rad(90)
gen_rectangle2 (ROI, Row, Column, Angle, Length1, Length2)
* -> create measure object
gen_measure_rectangle2 (Row, Column, Angle, Length1, Length2, Width, Height, 'bilinear', MeasureHandle)
dev_display (ROI)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 測量
* ****
measure_pairs (Fuse, MeasureHandle, 1, 1, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance)
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 結果視覺化
* ****
for i := 0 to |RowEdgeFirst| - 1 by 1
gen_contour_polygon_xld (EdgeFirst, [-sin(Angle + rad(90)) * Length2 + RowEdgeFirst[i],-sin(Angle - rad(90)) * Length2 + RowEdgeFirst[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeFirst[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeFirst[i]])
gen_contour_polygon_xld (EdgeSecond, [-sin(Angle + rad(90)) * Length2 + RowEdgeSecond[i],-sin(Angle - rad(90)) * Length2 + RowEdgeSecond[i]], [cos(Angle + rad(90)) * Length2 + ColumnEdgeSecond[i],cos(Angle - rad(90)) * Length2 + ColumnEdgeSecond[i]])
dev_set_color ('cyan')
dev_display (EdgeFirst)
dev_set_color ('magenta')
dev_display (EdgeSecond)
dev_set_color ('blue')
if (i == 0)
set_tposition (WindowID, RowEdgeFirst[i] + 5, ColumnEdgeFirst[i] + 20)
else
set_tposition (WindowID, RowEdgeFirst[i] - 40, ColumnEdgeFirst[i] + 20)
endif
write_string (WindowID, 'width: ' + IntraDistance[i] + ' pix')
endfor
disp_continue_message (WindowID, 'black', 'true')
stop ()
* ****
* 銷燬物件
* ****
close_measure (MeasureHandle)
dev_update_window ('on')
dev_clear_window ()
```
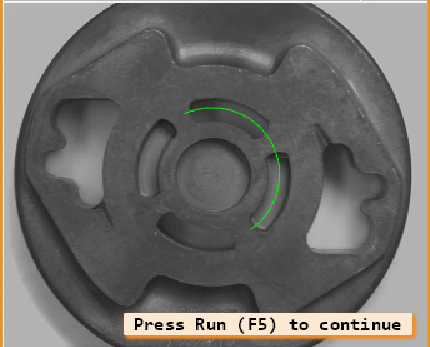
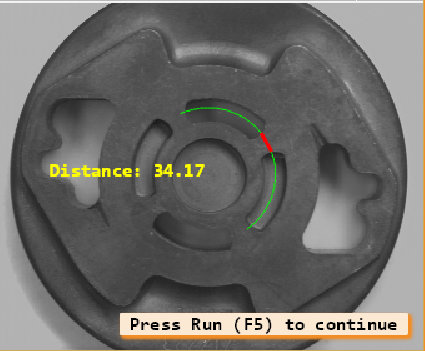
# 測量金屬鑄造部件-measure_arc
本例是檢測鑄件倒角後拉長孔之間的距離。為了達到最好的精度,建議使用背光與遠心鏡頭相結合的方式,而不是圖中的設定。

這個任務可以通過使用帶有圓形測量ROI的測量工具輕鬆解決。ROI的中心被放置在鑄件的中心;半徑設定為拉長孔與中心的距離。
```
Row := 275
Column := 335
Radius := 107
AngleStart := -rad(55)
AngleExtent := rad(170)
gen_measure_arc (Row, Column, Radius, AngleStart, AngleExtent, 10, Width, Height, 'nearest_neighbor', MeasureHandle)
```
現在,可以通過一個運算子的呼叫來測量孔之間的距離。
```
measure_pos (Zeiss1, MeasureHandle, 1, 10, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
```
源程式
```
* 例子包括很多視覺化操作。
read_image (Zeiss1, 'zeiss1')
get_image_size (Zeiss1, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Zeiss1)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_circle (WindowHandle, Row, Column, Radius)
Row := 275
Column := 335
Radius := 107
AngleStart := -rad(55)
AngleExtent := rad(170)
dev_set_draw ('fill')
dev_set_color ('green')
dev_set_line_width (1)
get_points_ellipse (AngleStart + AngleExtent, Row, Column, 0, Radius, Radius, RowPoint, ColPoint)
disp_arc (WindowHandle, Row, Column, AngleExtent, RowPoint, ColPoint)
dev_set_line_width (3)
gen_measure_arc (Row, Column, Radius, AngleStart, AngleExtent, 10, Width, Height, 'nearest_neighbor', MeasureHandle)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
count_seconds (Seconds1)
n := 10
for i := 1 to n by 1
measure_pos (Zeiss1, MeasureHandle, 1, 10, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
endfor
count_seconds (Seconds2)
Time := (Seconds2 - Seconds1) / n
disp_continue_message (WindowHandle, 'black', 'true')
* stop ()
distance_pp (RowEdge[1], ColumnEdge[1], RowEdge[2], ColumnEdge[2], IntermedDist)
* dev_display (Zeiss1)
dev_set_color ('red')
* disp_circle (WindowHandle, RowEdge, ColumnEdge, RowEdge - RowEdge + 1)
disp_line (WindowHandle, RowEdge[1], ColumnEdge[1], RowEdge[2], ColumnEdge[2])
dev_set_color ('yellow')
disp_message (WindowHandle, 'Distance: ' + IntermedDist, 'image', 250, 80, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\zeiss_result')
dev_set_line_width (1)
* disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_clear_window ()
```
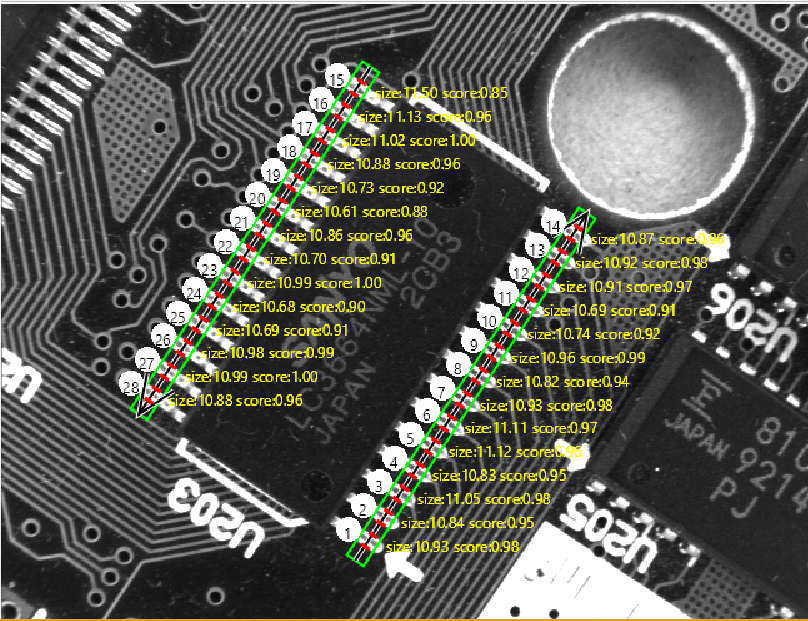
# 使用模糊測量法測量積體電路-fuzzy_measure_pin
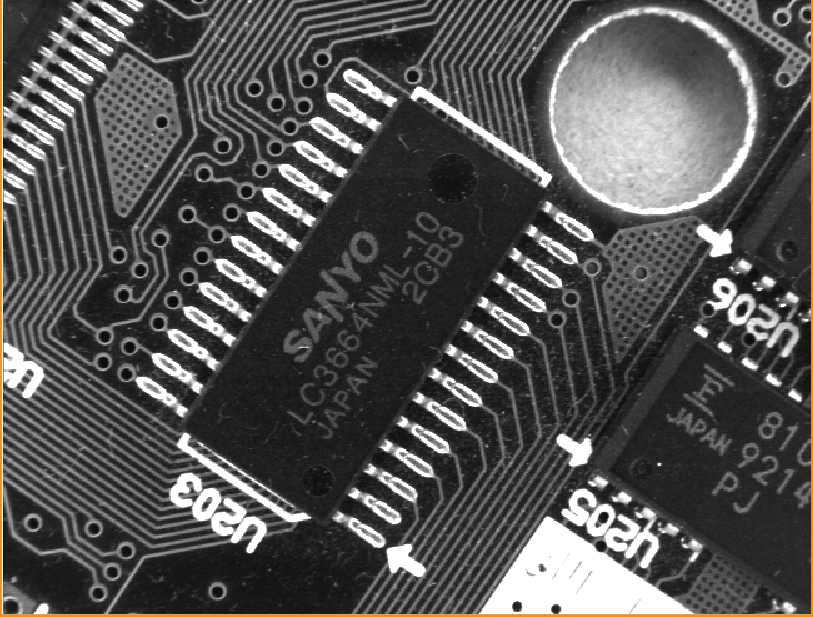
本例是測量IC的引線寬度和引線距離。本例中的照明條件相當困難,造成了每個引線都有四個邊緣可見。模糊規則就是用於將測量限制在正確的(外)引線上。
```
gen_measure_rectangle2 (Row2, Col2, Phi2, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle2)
create_funct_1d_pairs ([0.0,0.3], [1.0,0.0], FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle1, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
fuzzy_measure_pairs (Image, MeasureHandle1, 1, 30, 0.5, 'positive', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, RowEdgeMiddle1, ColumnEdgeMiddle1, FuzzyScore1, IntraDistance1, InterDistance1)
```
源程式
```
dev_close_window ()
read_image (Image, 'board/board-06')
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
*
* 模糊測量:
Row1 := 305.5
Col1 := 375.5
Phi1 := 0.982
Length1 := 167
Length2 := 8
gen_measure_rectangle2 (Row1, Col1, Phi1, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle1)
Row2 := 188.5
Col2 := 202.5
Phi2 := Phi1 - rad(180)
gen_measure_rectangle2 (Row2, Col2, Phi2, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle2)
* 建立一個模糊函式來選擇晶片引腳邊緣對的大小(約11Pixels)。
create_funct_1d_pairs ([0.0,0.3], [1.0,0.0], FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle1, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
set_fuzzy_measure_norm_pair (MeasureHandle2, 11.0, 'size_abs_diff', FuzzyAbsSizeDiffFunction)
fuzzy_measure_pairs (Image, MeasureHandle1, 1, 30, 0.5, 'positive', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, RowEdgeMiddle1, ColumnEdgeMiddle1, FuzzyScore1, IntraDistance1, InterDistance1)
fuzzy_measure_pairs (Image, MeasureHandle2, 1, 30, 0.5, 'positive', RowEdgeFirst2, ColumnEdgeFirst2, AmplitudeFirst2, RowEdgeSecond2, ColumnEdgeSecond2, AmplitudeSecond2, RowEdgeMiddle2, ColumnEdgeMiddle2, FuzzyScore2, IntraDistance2, InterDistance2)
*
* 視覺化:
dev_display (Image)
* 視覺化測量區域
dev_display_measure_object (Row1, Col1, Phi1, Length1, Length2)
dev_display_measure_object (Row2, Col2, Phi2, Length1, Length2)
* 視覺化邊緣對
dev_set_draw ('fill')
Pin := 1
dev_display_profile_points ([RowEdgeFirst1,RowEdgeSecond1], [ColumnEdgeFirst1,ColumnEdgeSecond1], Row1, Col1, Phi1, Length1, Length2)
for I := 0 to |ColumnEdgeFirst1| - 1 by 1
disp_message (WindowHandle, 'size:' + IntraDistance1[I]$'.2f' + ' score:' + FuzzyScore1[I]$'.2f', 'image', RowEdgeSecond1[I], ColumnEdgeSecond1[I] + 10, 'yellow', 'false')
MRow := RowEdgeSecond1[I] - 5
MCol := ColumnEdgeSecond1[I] - 20
dev_set_color ('white')
gen_circle (Circle, MRow, MCol, 10)
dev_display (Circle)
get_string_extents (WindowHandle, Pin, Ascent, Descent, SWidth, SHeight)
disp_message (WindowHandle, Pin, 'window', MRow - SHeight / 2, MCol - SWidth / 2, 'black', 'false')
Pin := Pin + 1
endfor
dev_display_profile_points ([RowEdgeFirst2,RowEdgeSecond2], [ColumnEdgeFirst2,ColumnEdgeSecond2], Row2, Col2, Phi2, Length1, Length2)
for I := 0 to |ColumnEdgeFirst2| - 1 by 1
dev_set_color ('yellow')
disp_message (WindowHandle, 'size:' + IntraDistance2[I]$'.2f' + ' score:' + FuzzyScore2[I]$'.2f', 'image', RowEdgeFirst2[I], ColumnEdgeFirst2[I] + 10, 'yellow', 'false')
MRow := RowEdgeFirst2[I] - 5
MCol := ColumnEdgeFirst2[I] - 20
dev_set_color ('white')
gen_circle (Circle, MRow, MCol, 10)
dev_display (Circle)
get_string_extents (WindowHandle, Pin, Ascent, Descent, SWidth, SHeight)
disp_message (WindowHandle, Pin, 'window', MRow - SHeight / 2, MCol - SWidth / 2, 'black', 'false')
Pin := Pin + 1
endfor
```
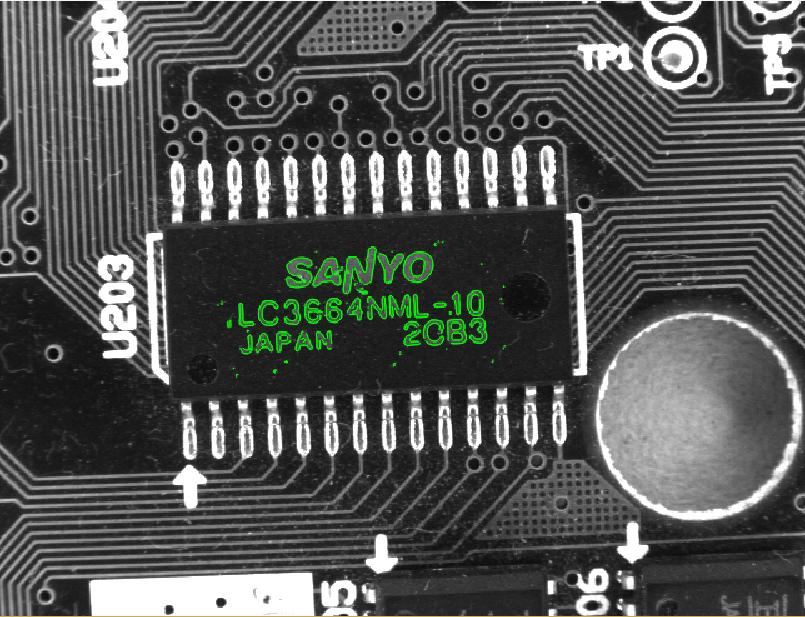
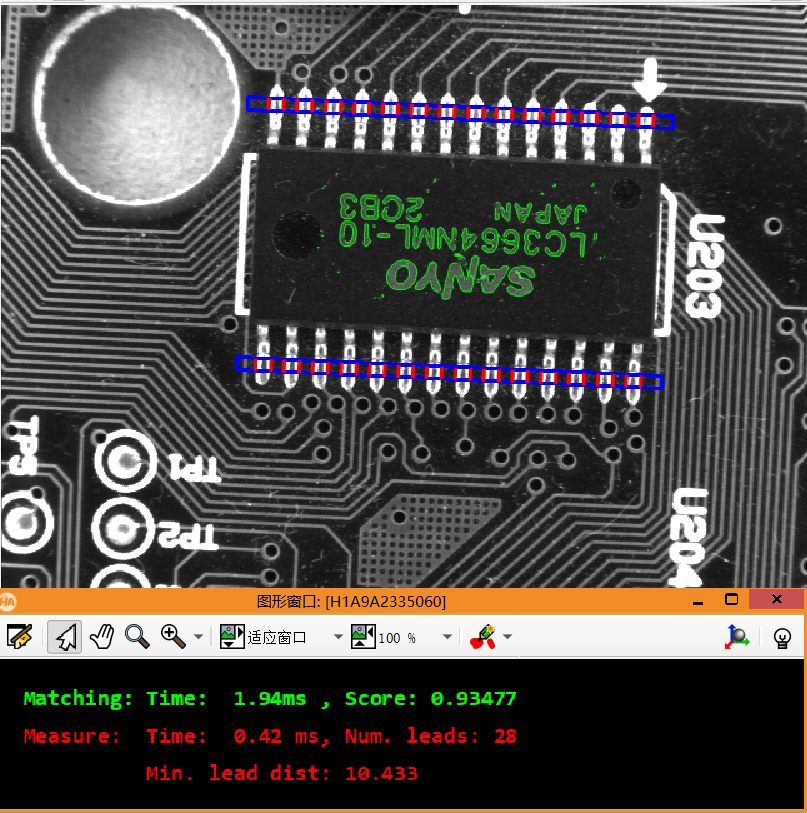
# 測量可移動的IC的引線-pm_measure_board
本例的任務是測量可移動的晶片引線的位置。 由於晶片可以出現在不同的位置和角度,用於測量的感興趣的區域必須對齊。
在這種情況下,通過使用基於形狀的匹配搜尋晶片上的印刷字元來實現對準。
```
gen_rectangle2 (Rectangle2, Row + Rect2Row, Column + Rect2Col, RectPhi, RectLength1, RectLength2)
reduce_domain (Image, Rectangle, ImageReduced)
create_shape_model (ImageReduced, 4, 0, rad(360), rad(1), 'none', 'use_polarity', 30, 10, ModelID)
```
找到印刷品後,ROI的位置將相對於印刷字元的位置進行幾何變換。
```
find_shape_model (ImageCheck, ModelID, 0, rad(360), 0.7, 1, 0.5, 'least_squares', 4, 0.7, RowCheck, ColumnCheck, AngleCheck, Score)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, RowCheck, ColumnCheck, HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, AngleCheck, RowCheck, ColumnCheck, HomMat2DRotate)
affine_trans_pixel (HomMat2DRotate, Rect1Row, Rect1Col, Rect1RowCheck, Rect1ColCheck)
```

然後,建立測量工具並應用測量。
```
gen_measure_rectangle2 (Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle1)
measure_pairs (ImageCheck, MeasureHandle1, 2, 90, 'positive', 'all', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, IntraDistance1, InterDistance1)
```
源程式
```
* 這個示例程式展示瞭如何使用模式匹配與形狀模型來定位一個物件。 此外,它還展示瞭如何使用檢測到的物體位置和旋轉來構建檢測任務的ROI。在這個例子中,IC上的印刷字元被用來尋找IC。 從找到的位置和旋轉,構建兩個測量矩形來測量IC引線之間的間距。 由於打光的緣故,引線在幾個位置和旋轉處的飽和灰度值為255,這擴大了引線的實際寬度,減小了引線之間的間距。
dev_update_pc ('off')
dev_update_window ('off')
dev_update_var ('off')
open_framegrabber ('File', 1, 1, 0, 0, 0, 0, 'default', -1, 'default', -1, 'default', 'board/board.seq', 'default', -1, 1, FGHandle)
grab_image (Image, FGHandle)
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_open_window (Height + 70, 0, Width, 120, 'black', WindowHandleText)
dev_set_window (WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
set_display_font (WindowHandleText, 16, 'mono', 'true', 'false')
dev_set_color ('red')
dev_display (Image)
Row1 := 188
Column1 := 182
Row2 := 298
Column2 := 412
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
area_center (Rectangle, Area, Row, Column)
Rect1Row := -102
Rect1Col := 5
Rect2Row := 107
Rect2Col := 5
RectPhi := 0
RectLength1 := 170
RectLength2 := 5
gen_rectangle2 (Rectangle1, Row + Rect1Row, Column + Rect1Col, RectPhi, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2, Row + Rect2Row, Column + Rect2Col, RectPhi, RectLength1, RectLength2)
reduce_domain (Image, Rectangle, ImageReduced)
create_shape_model (ImageReduced, 4, 0, rad(360), rad(1), 'none', 'use_polarity', 30, 10, ModelID)
get_shape_model_contours (ShapeModel, ModelID, 1)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, Row, Column, HomMat2DTranslate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DTranslate)
dev_display (Image)
dev_set_color ('green')
dev_display (ShapeModelTrans)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1)
dev_display (Rectangle2)
dev_set_draw ('fill')
dev_set_line_width (1)
dev_set_color ('yellow')
disp_message (WindowHandle, ['Press left button to start','and stop the demo'], 'window', 12, 12, 'black', 'true')
get_mbutton (WindowHandle, Row3, Column3, Button1)
wait_seconds (0.5)
Button := 0
while (Button != 1)
dev_set_window (WindowHandle)
dev_set_part (0, 0, Height - 1, Width - 1)
grab_image (ImageCheck, FGHandle)
dev_display (ImageCheck)
count_seconds (S1)
find_shape_model (ImageCheck, ModelID, 0, rad(360), 0.7, 1, 0.5, 'least_squares', 4, 0.7, RowCheck, ColumnCheck, AngleCheck, Score)
count_seconds (S2)
dev_display (ImageCheck)
if (|Score| > 0)
dev_set_color ('green')
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, RowCheck, ColumnCheck, HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, AngleCheck, RowCheck, ColumnCheck, HomMat2DRotate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DRotate)
dev_display (ShapeModelTrans)
affine_trans_pixel (HomMat2DRotate, Rect1Row, Rect1Col, Rect1RowCheck, Rect1ColCheck)
affine_trans_pixel (HomMat2DRotate, Rect2Row, Rect2Col, Rect2RowCheck, Rect2ColCheck)
gen_rectangle2 (Rectangle1Check, Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2Check, Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1Check)
dev_display (Rectangle2Check)
dev_set_draw ('fill')
count_seconds (S3)
gen_measure_rectangle2 (Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle1)
gen_measure_rectangle2 (Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle2)
measure_pairs (ImageCheck, MeasureHandle1, 2, 90, 'positive', 'all', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, IntraDistance1, InterDistance1)
measure_pairs (ImageCheck, MeasureHandle2, 2, 90, 'positive', 'all', RowEdgeFirst2, ColumnEdgeFirst2, AmplitudeFirst2, RowEdgeSecond2, ColumnEdgeSecond2, AmplitudeSecond2, IntraDistance2, InterDistance2)
count_seconds (S4)
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst1 - RectLength2 * cos(AngleCheck), ColumnEdgeFirst1 - RectLength2 * sin(AngleCheck), RowEdgeFirst1 + RectLength2 * cos(AngleCheck), ColumnEdgeFirst1 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond1 - RectLength2 * cos(AngleCheck), ColumnEdgeSecond1 - RectLength2 * sin(AngleCheck), RowEdgeSecond1 + RectLength2 * cos(AngleCheck), ColumnEdgeSecond1 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeFirst2 - RectLength2 * cos(AngleCheck), ColumnEdgeFirst2 - RectLength2 * sin(AngleCheck), RowEdgeFirst2 + RectLength2 * cos(AngleCheck), ColumnEdgeFirst2 + RectLength2 * sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond2 - RectLength2 * cos(AngleCheck), ColumnEdgeSecond2 - RectLength2 * sin(AngleCheck), RowEdgeSecond2 + RectLength2 * cos(AngleCheck), ColumnEdgeSecond2 + RectLength2 * sin(AngleCheck))
dev_set_line_width (1)
NumLeads := |IntraDistance1| + |IntraDistance2|
MinDistance := min([InterDistance1,InterDistance2])
dev_set_window (WindowHandleText)
dev_set_part (0, 0, 119, Width - 1)
dev_clear_window ()
disp_message (WindowHandleText, 'Matching: Time: ' + ((S2 - S1) * 1000)$'5.2f' + 'ms , Score: ' + Score$'7.5f', 'image', 20, 20, 'green', 'false')
disp_message (WindowHandleText, 'Measure: Time: ' + ((S4 - S3) * 1000)$'5.2f' + ' ms, Num. leads: ' + NumLeads$'2d', 'image', 50, 20, 'red', 'false')
disp_message (WindowHandleText, ' Min. lead dist: ' + MinDistance$'6.3f', 'image', 80, 20, 'red', 'false')
endif
dev_error_var (Error, 1)
dev_set_check ('~give_error')
get_mposition (WindowHandle, R, C, Button)
dev_error_var (Error, 0)
dev_set_check ('give_error')
if (Error != H_MSG_TRUE)
Button := 0
endif
endwhile
dev_set_window (WindowHandleText)
dev_close_window ()
close_framegrabber (FGHandle)
```
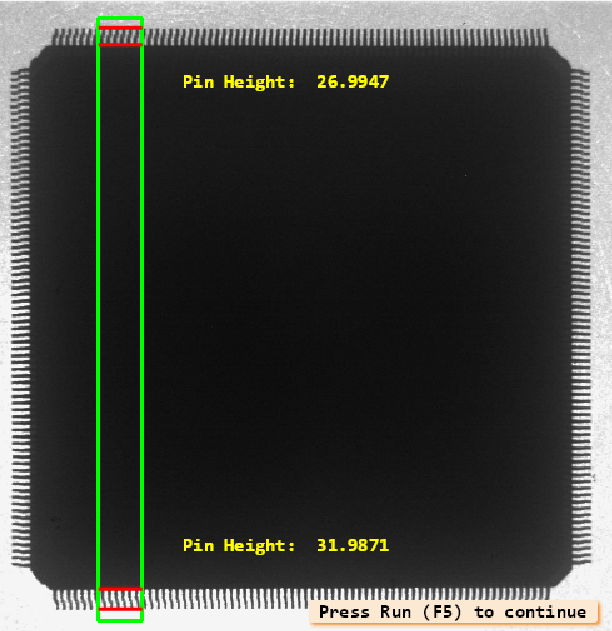
# 測量IC-measure_pin
本例的任務是檢查積體電路的主要尺寸。
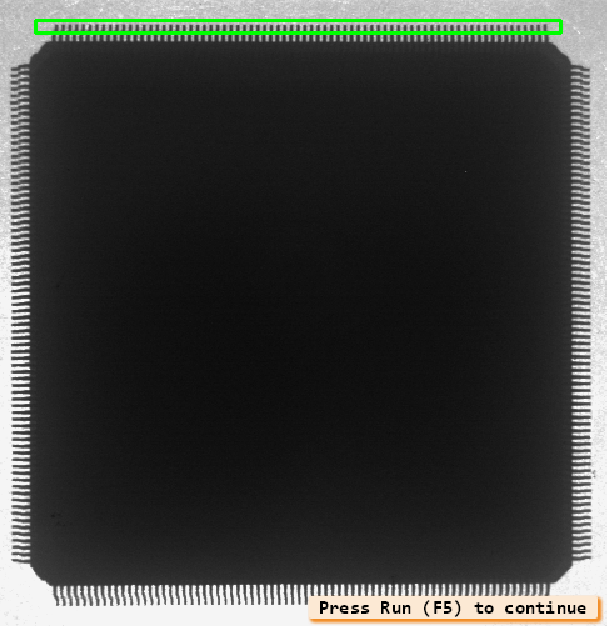
第一步,測量每個引線的範圍和引線之間的距離。為此,定義了一個包含引線的矩形用來生成測量物件。這是用來提取垂直於矩形主軸線的直邊對。
```
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
measure_pairs (Image, MeasureHandle, 1.5, 30, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, PinWidth, PinDistance)
```
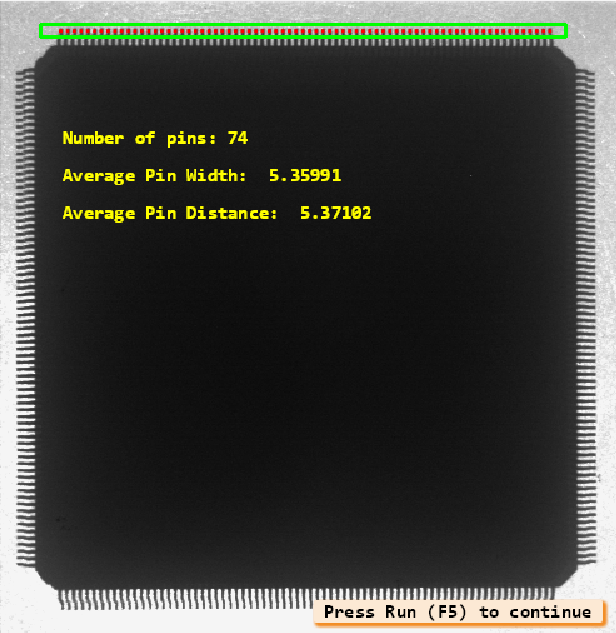
從提取的直邊對中,得出引線的數量、平均寬度和它們之間的平均距離。
```
avgPinWidth := sum(PinWidth) / |PinWidth|
avgPinDistance := sum(PinDistance) / |PinDistance|
numPins := |PinWidth|
```
第二部分顯示測量工具。儘管每根引線的寬度只有幾個畫素,導線的長度是可以確定的。為此,一個基於包含IC兩邊相對引線的矩形的測量物件生成了。第一個和第二個邊緣之間的距離是上引線的長度,第三個和第四個邊緣之間的距離是下引線的長度。
```
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
measure_pos (Image, MeasureHandle, 1.5, 30, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
```
源程式
```
dev_close_window ()
read_image (Image, 'ic_pin')
get_image_size (Image, Width, Height)
dev_open_window (0, 0, Width / 2, Height / 2, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Image)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_rectangle2 (WindowHandle, Row, Column, Phi, Length1, Length2)
Row := 47
Column := 485
Phi := 0
Length1 := 420
Length2 := 10
dev_set_color ('green')
dev_set_draw ('margin')
dev_set_line_width (3)
gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2)
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_update_pc ('off')
dev_update_var ('off')
n := 100
count_seconds (Seconds1)
for i := 1 to n by 1
measure_pairs (Image, MeasureHandle, 1.5, 30, 'negative', 'all', RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, PinWidth, PinDistance)
endfor
count_seconds (Seconds2)
Time := Seconds2 - Seconds1
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst, ColumnEdgeFirst, RowEdgeSecond, ColumnEdgeSecond)
avgPinWidth := sum(PinWidth) / |PinWidth|
avgPinDistance := sum(PinDistance) / |PinDistance|
numPins := |PinWidth|
dev_set_color ('yellow')
disp_message (WindowHandle, 'Number of pins: ' + numPins, 'image', 200, 100, 'yellow', 'false')
disp_message (WindowHandle, 'Average Pin Width: ' + avgPinWidth, 'image', 260, 100, 'yellow', 'false')
disp_message (WindowHandle, 'Average Pin Distance: ' + avgPinDistance, 'image', 320, 100, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\pins_result')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
* draw_rectangle1 (WindowHandle, Row1, Column1, Row2, Column2)
Row1 := 0
Column1 := 600
Row2 := 100
Column2 := 700
dev_set_color ('blue')
disp_rectangle1 (WindowHandle, Row1, Column1, Row2, Column2)
stop ()
dev_set_part (Row1, Column1, Row2, Column2)
dev_display (Image)
dev_set_color ('green')
dev_display (Rectangle)
dev_set_color ('red')
disp_line (WindowHandle, RowEdgeFirst, ColumnEdgeFirst, RowEdgeSecond, ColumnEdgeSecond)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_part (0, 0, Height - 1, Width - 1)
dev_display (Image)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
dev_set_color ('green')
* draw_rectangle2 (WindowHandle, Row, Column, Phi, Length1, Length2)
Row := 508
Column := 200
Phi := -1.5708
Length1 := 482
Length2 := 35
gen_rectangle2 (Rectangle, Row, Column, Phi, Length1, Length2)
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, 'nearest_neighbor', MeasureHandle)
stop ()
measure_pos (Image, MeasureHandle, 1.5, 30, 'all', 'all', RowEdge, ColumnEdge, Amplitude, Distance)
PinHeight1 := RowEdge[1] - RowEdge[0]
PinHeight2 := RowEdge[3] - RowEdge[2]
dev_set_color ('red')
disp_line (WindowHandle, RowEdge, ColumnEdge - Length2, RowEdge, ColumnEdge + Length2)
disp_message (WindowHandle, 'Pin Height: ' + PinHeight1, 'image', RowEdge[1] + 40, ColumnEdge[1] + 100, 'yellow', 'false')
disp_message (WindowHandle, 'Pin Height: ' + PinHeight2, 'image', RowEdge[3] - 120, ColumnEdge[3] + 100, 'yellow', 'false')
* dump_window (WindowHandle, 'tiff_rgb', 'C:\\Temp\\pins_height_result')
dev_set_draw ('fill')
dev_set_line_width