
LiteOS-任務篇-原始碼分析-系統啟動函式
阿新 • • 發佈:2020-10-09
[toc]
---
## 前言
* 20201009
* 移植好核心後,開始實戰核心。
* **原始碼分析一般都在程式碼註釋中**。
* 本文LiteOS採用非接管中斷方式。
* 本文原始碼基於 **LiteOS 2018** 原始碼,**最新官方原始碼中都有註釋,可參考**。
* 本文原始碼與**最新官方原始碼**區別
* 原理一樣,原始碼稍有不同,且**最新官方原始碼**中帶有註釋。
### 連結
* [LiteOS原始碼連結](https://gitee.com/LiteOS/LiteOS)
* [常見問題](https://liteos.github.io/porting/faq.html)
* [華為開發者社群](https://developer.huaweicloud.com/)
* [華為LiteOS官方教程](https://support.huaweicloud.com/LiteOS/index.html)
* [我的原始碼](https://gitee.com/lidreaming/LiteOS-mcu)
* 包含 裸機原始碼
* LiteOS 工程模板
* 其它關於 LiteOS 的 demo 及 note
### 參考
* *上面連結*
## 開啟排程
```c
/* 開啟排程 */
LOS_Start();
```
### `LOS_Start` 函式原始碼
* 具體的原始碼分析可看原始碼篇
* 主要內容
* 配置RTOS的節拍定時器
* 啟動排程
```c
/*****************************************************************************
Function : LOS_Start
Description : Task start function
Input : None
Output : None
Return : LOS_OK on success or error code on failure
*****************************************************************************/
LITE_OS_SEC_TEXT_INIT UINT32 LOS_Start(VOID)
{
UINT32 uwRet;
/* 判斷是否使用專用定時器 */
#if (LOSCFG_BASE_CORE_TICK_HW_TIME == NO) // 不使用專門的定時器
uwRet = osTickStart(); // 開啟排程
if (uwRet != LOS_OK)
{
PRINT_ERR("osTickStart error\n");
return uwRet;
}
#else // 使用專門的定時器
extern int os_timer_init(void);
uwRet = os_timer_init(); // RTOS 配置的專用定時器
if (uwRet != LOS_OK)
{
PRINT_ERR("os_timer_init error\n");
return uwRet;
}
#endif
LOS_StartToRun(); // 啟動排程,彙編
return uwRet;
}
```
#### `osTickStart` 函式原始碼
* 巨集說明
* `OS_SYS_CLOCK` : 系統時鐘頻率,單位:Hz (*硬系統時鐘頻率,即是CPU頻率*)
* `LOSCFG_BASE_CORE_TICK_PER_SECOND` : 每秒心跳次數 (*軟系統時鐘頻率,即是RTOS頻率*)
* 主要內容為:
* 檢查引數
* 配置RTOS系統時鐘滴答定時器
```c
/*****************************************************************************
Function : osTickStart
Description: Configure Tick Interrupt Start
Input : none
output : none
return : LOS_OK - Success , or LOS_ERRNO_TICK_CFG_INVALID - failed
*****************************************************************************/
LITE_OS_SEC_TEXT_INIT UINT32 osTickStart(VOID)
{
UINT32 uwRet;
if ((0 == OS_SYS_CLOCK)
|| (0 == LOSCFG_BASE_CORE_TICK_PER_SECOND)
|| (LOSCFG_BASE_CORE_TICK_PER_SECOND > OS_SYS_CLOCK))/*lint !e506*/ /* 如果每秒心跳次數設定大於系統時鐘頻率的設定,則,ERROR */
{
return LOS_ERRNO_TICK_CFG_INVALID;
}
#if (LOSCFG_PLATFORM_HWI == YES) // 開啟中斷接管
#if (OS_HWI_WITH_ARG == YES) // 引數配置項
osSetVector(SysTick_IRQn, (HWI_PROC_FUNC)osTickHandler, NULL); // 設定中斷向量表
#else
osSetVector(SysTick_IRQn, osTickHandler); // 設定中斷向量表
#endif
#endif
g_uwCyclesPerTick = OS_SYS_CLOCK / LOSCFG_BASE_CORE_TICK_PER_SECOND; // 算出每個心跳的週期
g_ullTickCount = 0;
uwRet = SysTick_Config(OS_SYS_CLOCK/LOSCFG_BASE_CORE_TICK_PER_SECOND); // 配置滴答定時器。引數為:兩個中斷之間的節拍數
if (uwRet == 1)
{
return LOS_ERRNO_TICK_PER_SEC_TOO_SMALL;
}
return LOS_OK;
}
```
#### `LOS_StartToRun` 函式原始碼
* 分析再原始碼註釋中
* 簡略步驟
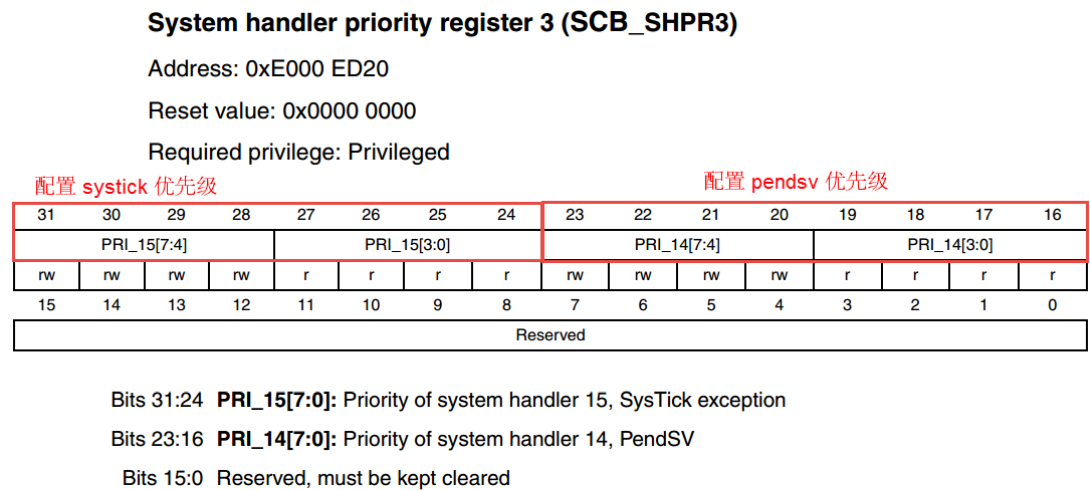
1. 將 **SysTick** 和 **PendSVd** 優先順序設定為最低
2. 將 **g_bTaskScheduled** 至為 1
3. 設定控制暫存器為 **CONTROL**
4. 更新當前執行任務 `Set g_stLosTask.pstRunTask = g_stLosTask.pstNewTask;`
5. 更新當前執行任務的任務狀態 `Set g_stLosTask.pstRunTask->usTaskStatus |= OS_TASK_STATUS_RUNNING;`
6. 手動更新 **PSP** 值,恢復到棧頂
7. 更新 **LR** 暫存器
8. 開啟中斷
9. 跳轉到當前任務的 **PC** ,教繼續執行任務。
```S
LOS_StartToRun ;系統啟動函式
;; C:*OS_NVIC_SYSPRI2 = OS_NVIC_PENDSV_PRI; // 配置 SysTick 與 PendSVd 的優先順序(看圖Priority config)
LDR R4, =OS_NVIC_SYSPRI2 ;OS_NVIC_SYSPRI2這個值給 R4
LDR R5, =OS_NVIC_PENDSV_PRI ;OS_NVIC_PENDSV_PRI這個值給 R5
STR R5, [R4] ;把 R5 的值存到 R4指定的地址中
;; C:g_bTaskScheduled = 1;
LDR R0, =g_bTaskScheduled ;; 把變數 g_bTaskScheduled 的地址賦給 R0
MOV R1, #1 ;把 1 賦值給 R1 暫存器
STR R1, [R0]
;; 把 2 賦給 程式狀態暫存器 CONTROL
MOV R0, #2
MSR CONTROL, R0
;; C:g_stLosTask.pstRunTask = g_stLosTask.pstNewTask;
LDR R0, =g_stLosTask ;; R2 = g_stLosTask.pstNewTask;
LDR R2, [R0, #4] ;
LDR R0, =g_stLosTask ;; g_stLosTask.pstRunTask = g_stLosTask.pstNewTask;
STR R2, [R0]
;; C:g_stLosTask.pstRunTask->usTaskStatus = g_stLosTask.pstRunTask->usTaskStatus | OS_TASK_STATUS_RUNNING; // 把當前任務狀態更新為 OS_TASK_STATUS_RUNNING
LDR R3, =g_stLosTask ;; R0 = g_stLosTask.pstRunTask;
LDR R0, [R3]
LDRH R7, [R0 , #4] ;; R7 = g_stLosTask.pstRunTask->usTaskStatus;;
MOV R8, #OS_TASK_STATUS_RUNNING
ORR R7, R7, R8 ;; R7 = g_stLosTask.pstRunTask->usTaskStatus | OS_TASK_STATUS_RUNNING
STRH R7, [R0 , #4] ;; g_stLosTask.pstRunTask->usTaskStatus = g_stLosTask.pstRunTask->usTaskStatus | OS_TASK_STATUS_RUNNING;
;; C: R12 = *(g_stLosTask.pstRunTask->pStackPointer) + 36; // 先偏移棧指標(手動出棧) (R4-R11, PRIMASK)
LDR R12, [R0] ;; R12 = *(g_stLosTask.pstRunTask->pStackPointer);
ADD R12, R12, #36 ;; R12 = R12 + 36; // 跳過任務中原本屬於暫存器 (R4-R11, PRIMASK)的值
;; 把 R12 作為基地址,出棧。LDMFD:先出棧後遞增
;; R12 出棧到 R0,R12 遞增 4;R12 出棧到 R1,R12 遞增 4;......
LDMFD R12!, {R0-R7} ;; 把任務中原本屬於暫存器 (R0-R3, R12, LR, PC, xPSR) 中的值分別複製到 (R0-R7)
MSR PSP, R12 ;; 更新 PSP 指標
MOV LR, R5 ;; 任務中的 LR 指標值賦給 LR 暫存器
;MSR xPSR, R7 ;; 任務中的 xPSR 指標值賦給 xPSR 暫存器(遮蔽了)
CPSIE I ;; 開中斷
BX R6 ;; 跳轉到 當前任務的 PC 指標執行,並切換指令集
```
* **圖-Priority config**
* 該函式部分變數原始碼程式碼(**參考**)
* 檔案 **los_dispatch_keil.S** 中
* `OS_NVIC_SYSPRI2 EQU 0xE000ED20`
* `OS_NVIC_PENDSV_PRI EQU 0xF0F00000`
* 檔案 **los_task.c** 中
* `LITE_OS_SEC_BSS BOOL g_bTaskScheduled;`
* `LITE_OS_SEC_BSS ST_LOS_TASK g_stLosTask;`
* 檔案 **los_task.ph** 中
```c
/**
* @ingroup los_task
* Define the task control block structure.
*/
typedef struct tagTaskCB
{
VOID *pStackPointer; /**< Task stack pointer */
UINT16 usTaskStatus;
UINT16 usPriority;
UINT32 uwStackSize; /**< Task stack size */
UINT32 uwTopOfStack; /**< Task stack top */
UINT32 uwTaskID; /**< Task ID */
TSK_ENTRY_FUNC pfnTaskEntry; /**< Task entrance function */
VOID *pTaskSem; /**< Task-held semaphore */
VOID *pTaskMux; /**< Task-held mutex */
UINT32 uwArg; /**< Parameter */
CHAR *pcTaskName; /**< Task name */
LOS_DL_LIST stPendList;
LOS_DL_LIST stTimerList;
UINT32 uwIdxRollNum;
EVENT_CB_S uwEvent;
UINT32 uwEventMask; /**< Event mask */
UINT32 uwEventMode; /**< Event mode */
VOID *puwMsg; /**< Memory allocated to queues */
} LOS_TASK_