
【海思】Hi3531A SPI功能的詳細配置以及使用
阿新 • • 發佈:2020-11-27
[toc]
# 一、前言
因為部門的一個負責海思驅動開發的老同事另謀高就了,部門又暫時找不到人來對接他的任務,所以領導就讓我這個菜鳥來硬著頭皮頂上了。在這我也對這位老同事表示深刻的感謝,在對接的期間,那麼耐心教導我,讓我這個剛出來社會不久、又沒怎麼接觸過海思平臺的菜鳥學習到了很多東西。
迴歸正題:部門在海思3531A產品除錯的時候發現SPI通訊不正常,使用示波器發現SPI的CS片選引腳怎麼也拉不低,SCLK(時鐘)、SDI(資料輸入引腳)和SDO(資料輸出引腳)的訊號也不正常。在我不停地閱讀官方資料和詢問大神們,最終調好了。
所以接下來,本文章會針對 **海思SPI配置的問題** 來記錄下我除錯的整一個過程,包括官方資料的閱讀。
# 二、SPI管腳資訊獲取
在一個新的平臺上面開發,我們首先需要閱讀官方的資料,並獲取到自己需要的資料。這裡主要是針對與 **SPI配置** 相關的資料查詢。
## 2.1 SPI_SCLK、SPI_SDI、SPI_SDO管腳複用暫存器
因為涉及到SPI的使用(如果不熟悉SPI通訊協議的,可以先去搜索瞭解下先),那就會涉及到管腳的使用,所以我們先找到晶片的管腳資訊表,這個管腳資訊表一般晶片平臺的官方資料裡面都會有,而且一般都會放在硬體的目錄下。海思平臺的管腳資訊表的路徑是 **00.hardware\chip\document_cn\HI3531AV100_PINOUT_CN.xlsx** ,開啟可以看到這個表格有很多頁,這些頁的內容包括管腳的功能/複用功能、預設值、特性以及管腳複用暫存器等資訊。
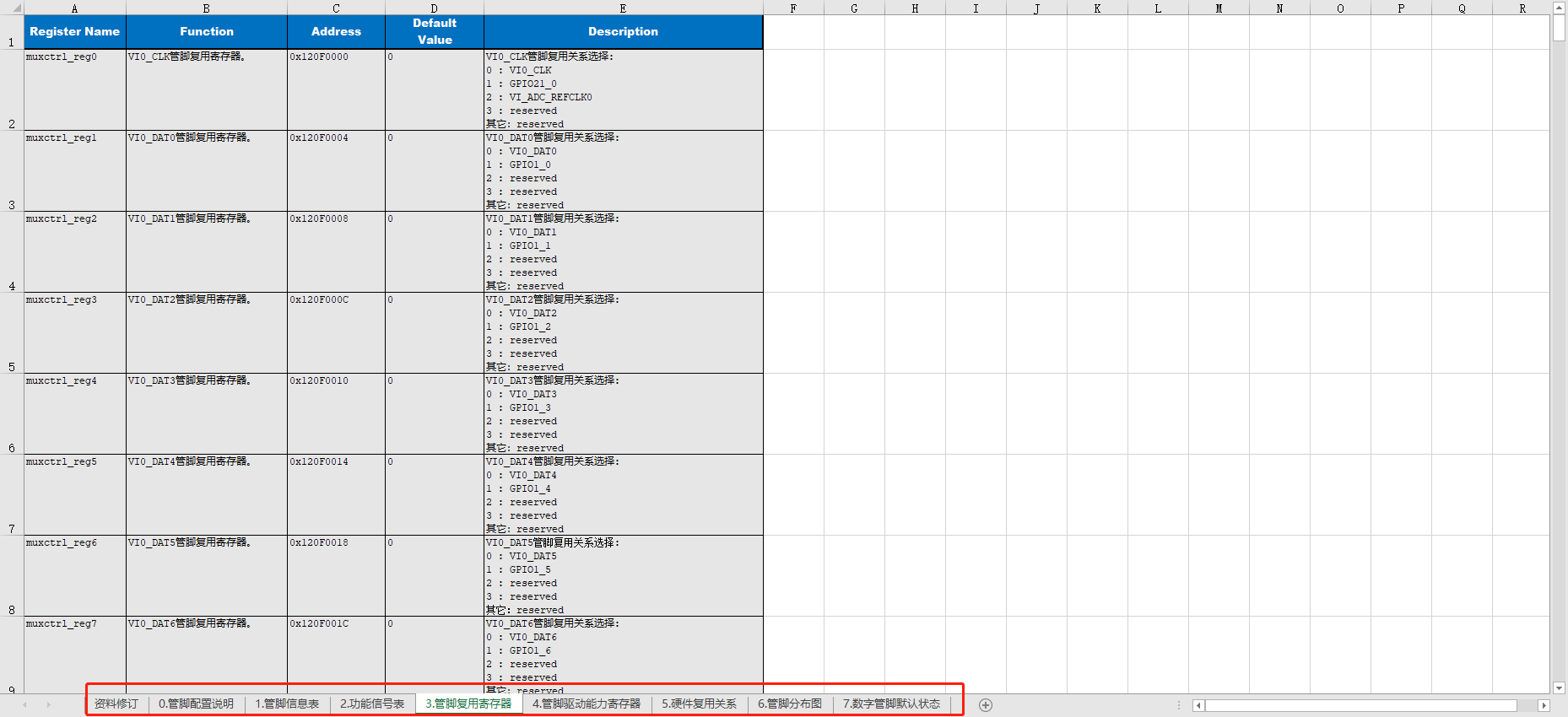
我們在HI3531AV100_PINOUT_CN.xlsx這個表格的《1.管腳資訊表》頁找到SPI管腳。

* *《1.管腳資訊表》頁列說明:*
| Pin Num | Pin Name | Voltage(V) | Default | IO Type | Mux Control Register Name | Drive&Slew Control Register Name | Function n |
| --- | --- | --- | --- | --- | --- | --- | --- |
| 管腳號 | 管腳名稱 | 管腳輸入或輸出的高/低電平 | 預設的管腳是輸入/輸出高還是低等。 | IO口的型別 | 複用暫存器名稱,有的話就代表該管腳有複用功能。如果不是硬體複用可在《3.管腳複用暫存器》頁查詢該名稱,可以看到該管腳的複用暫存器地址以及功能描述;如果是硬體複用,則可以在《5.硬體複用關係》頁查詢到。 | 這是管腳的驅動能力暫存器,可在《4.管腳驅動能力暫存器》頁檢視。 | 這是對應管腳的功能描述。 |
* *我們可以看到暫存器部分 HI3531AV100_PINOUT_CN.xlsx 表格就只是說了管腳複用的一些暫存器,那麼其他管腳的暫存器呢?一般其他的暫存器文件也是會在這個目錄下的,海思平臺的這個文件是在* **00.hardware\chip\document_cn\Hi3531A H.264編解碼處理器使用者指南.pdf** 。
通過上面管腳資訊表,我們發現和SPi相關的有7個管腳,而且都是複用管腳,其中四個是片選管腳,其他則是SPi的時鐘(SPI_SCLK)、資料輸入(SPI_SDI)、資料輸出(SPI_SDO)管腳。我們需要使用SPI的功能,那麼就需要正確配置每個引腳。
接下來我們先根據上面的複用管腳的複用暫存器名稱,到《3.管腳複用暫存器》頁或者《5.硬體複用關係》頁裡面找:
1. **片選管腳SPI_CSN0-SPI_CSN3:**
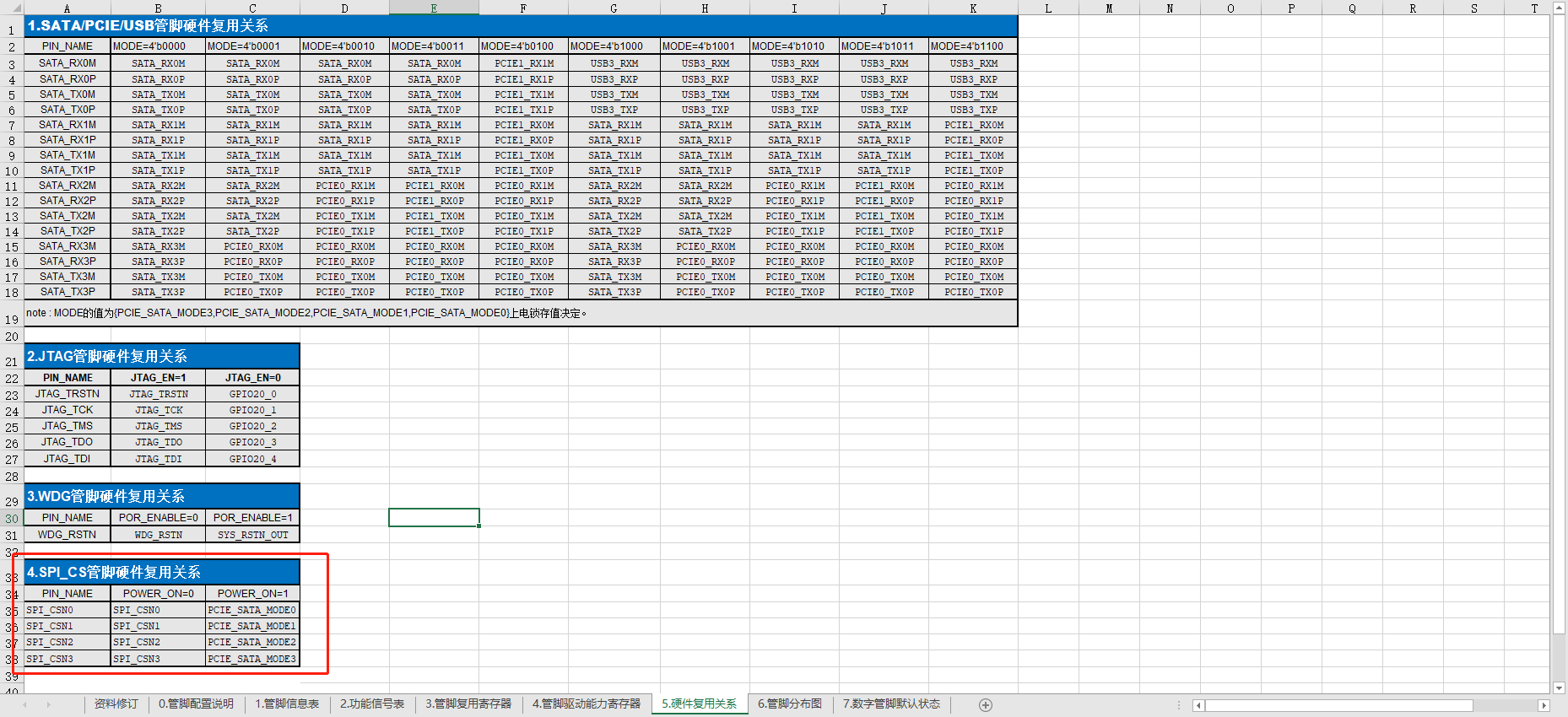
片選管腳是硬體複用的,這一般不需要軟體來進行配置,需要硬體工程師來配合。通過個人的除錯經驗來說,需要用到的的片選管腳硬體上不要接上拉電阻或者下拉電阻,否則海思晶片有可能會無法控制該片選管腳。
2. **SPI_SCLK、SPI_SDI、SPI_SDO管腳複用暫存器:**
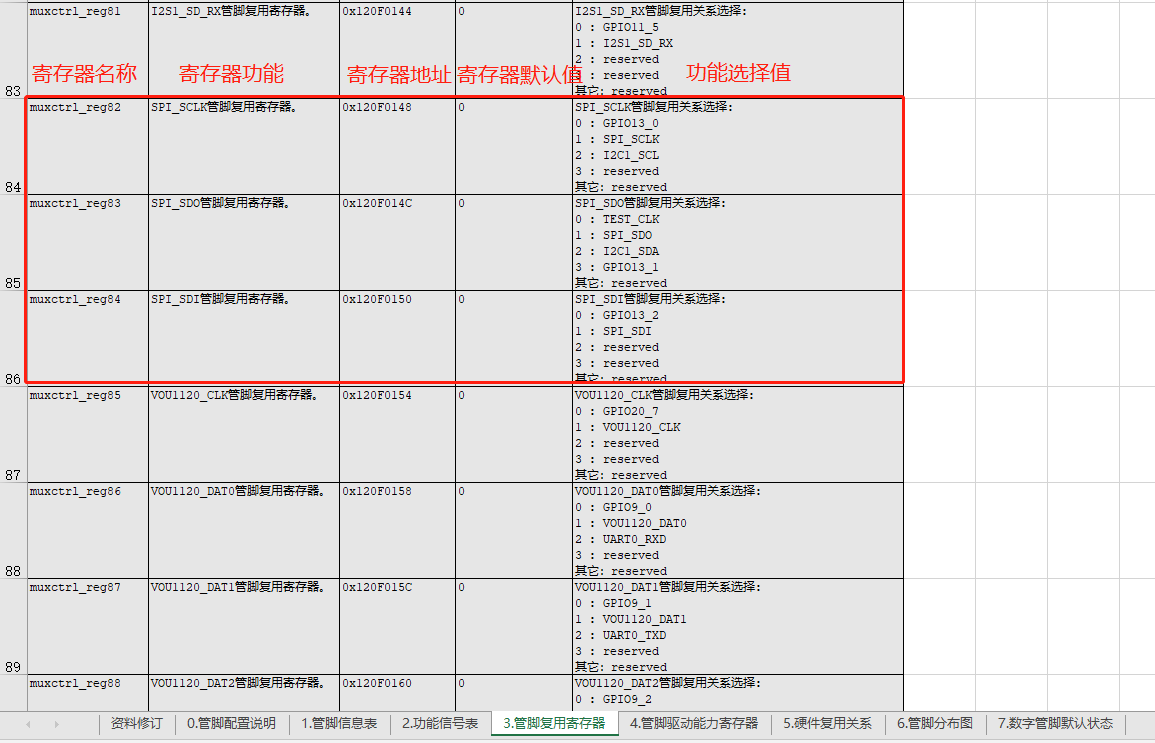
通過上圖得知,SPI_SCLK、SPI_SDI、SPI_SDO管腳的預設值都不是和SPI通訊相關的,所以我們需要配置這些管腳為SPI功能,也就是要往暫存器寫0x01的值。
## 2.2 片選SPI_CSN0-SPI_CSN3管腳暫存器
在HI3531AV100_PINOUT_CN.xlsx 表格中,SPI_SCLK、SPI_SDI、SPI_SDO管腳的暫存器的地址和值都找到了,但是片選管腳的暫存器呢?不在這個表格,那就是在上面提到的 **00.hardware\chip\document_cn\Hi3531A H.264編解碼處理器使用者指南.pdf** 文件中了。開啟文件,我們發現該片選的暫存器是在 **3.系統/3.5.系統控制器/3.5.5.外設控制暫存器** 的目錄中,是外設功能選擇暫存器2(MISC_CTRL5)控制的片選:
* 外設控制暫存器概覽:

* MISC_CTRL5暫存器:
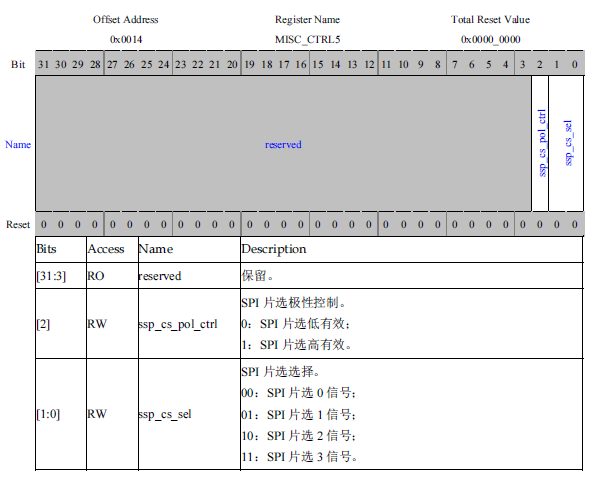
這樣的話我麼就知道片選引腳的暫存器地址是 0x1212 0014、對應的值也可以通過上圖MISC_CTRL5暫存器得知了。
# 三、配置和使能與SPI相關的管腳
到了這裡,SPI所有引腳的暫存器地址和對應的值都知道了,那這些應該怎麼配置呢?
先不要著急,我們先來開啟 **01.software\board\document_cn\Hi3531A SDK 安裝以及升級使用說明.txt** 這個文件(當我們第一次拿到官方SDK的時候就應該看這個來進入著手,裡面內容寫得不是很詳細,但是覆蓋面挺大的。01.software\board\document_cn這個目錄下的文件都是與軟體開發相關的文件),看一下有沒有和管腳配置的相關的引導。
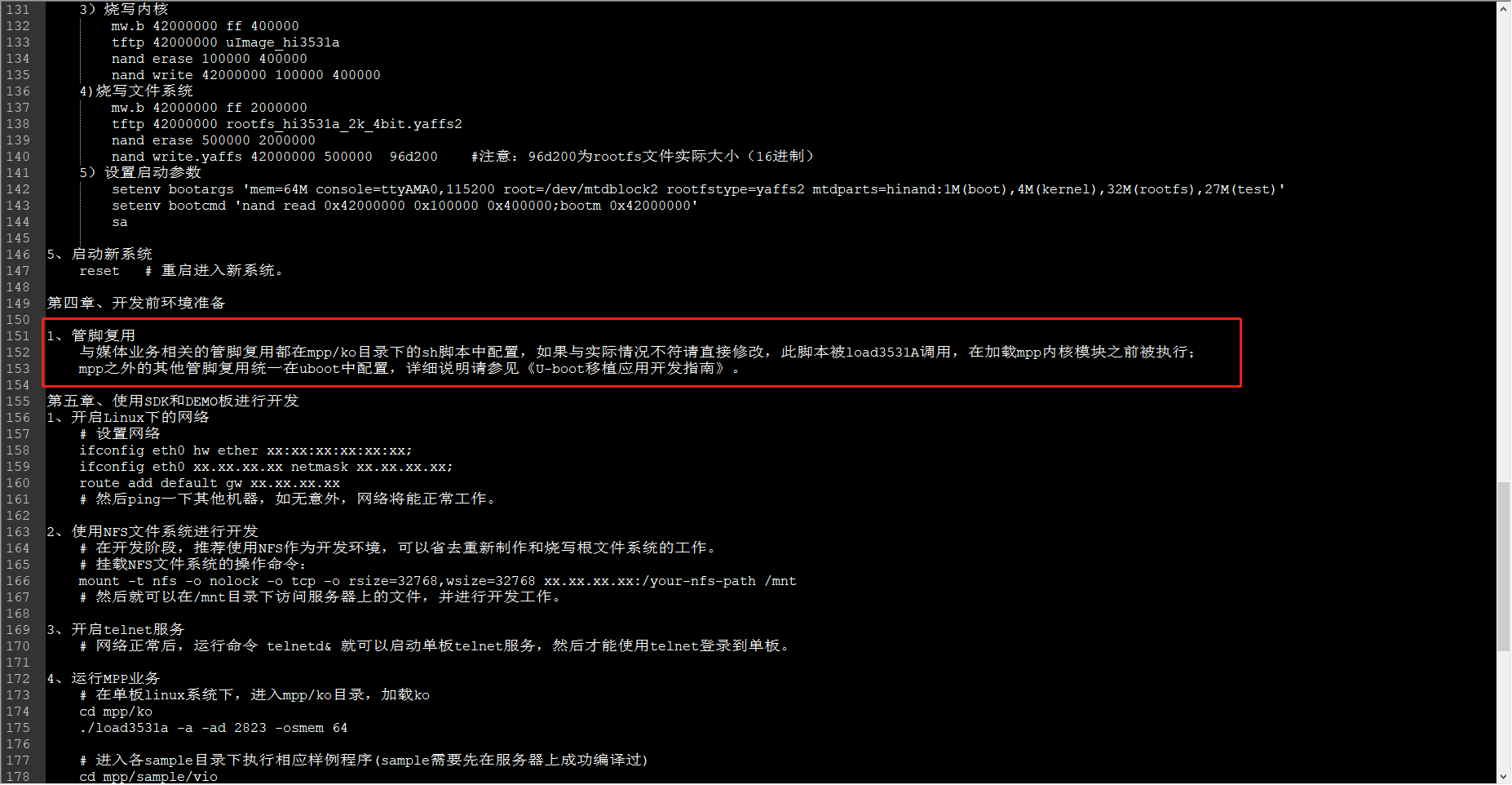
可以發現是有說到與管腳配置相關的說明,而且正好是複用管腳的使用。通過以上的文字可知,很有可能我們的相關管腳就是在mpp/ko目錄下的sh指令碼中配置的,我們到SDK的mpp/ko目錄看下sh指令碼。其中pinmux_vicap_i2c_i2s.sh指令碼的內容如下:
```cpp
#!/bin/sh
echo "run $0 begin!!!";
#I2C
himm 0x120F01CC 0x1; # 0:GPIO19_6 01:I2C0_SDA
himm 0x120F01D0 0x1; # 0:GPIO19_7 01:I2C0_SCL
himm 0x120F0148 0x2; # 0: GPI13_0 01: SPI_SCLK 2:I2C1_SCL #剛好是SPI_SCLK複用暫存器的地址,這裡設定為了I2C1_SCL功能
himm 0x120F014C 0x2; # 0: TEST_CLK 01: SPI_SDO 2:I2C1_SDA #是SPI_SDO複用暫存器的地址,這裡設定為了I2C1_SDA功能
#VICAP
himm 0x120F0000 0x2;
himm 0x120F0024 0x2;
himm 0x120F0048 0x2; # 0:GPIO21_2 01:VI_ADC_REFCLK0 2:VI1_CLK
himm 0x120F004c 0x2;
himm 0x120F0070 0x2;
himm 0x120F0094 0x2; # 0:GPIO21_5 01:VI_ADC_REFCLK1 2:VI3_CLK
himm 0x120F0098 0x2;
himm 0x120F00bc 0x2;
himm 0x120F00E0 0x2; # 0:GPIO12_1 01:VI_ADC_REFCLK2 2:VI5_CLK
himm 0x120F00e4 0x2;
himm 0x120F0108 0x2;
himm 0x120F012C 0x2; # 0:GPIO20_6 01:VI_ADC_REFCLK3 2:VI7_CLK
#UART
himm 0x120F0200 0x3; # 0: GPIO18_2 1:VOU_SLV_DAT11 2:UART1_RTSN 3:UART0_RTSN
himm 0x120F0204 0x3; # 0: GPIO18_3 1:VOU_SLV_DAT10 2:UART1_CTSN 3:UART0_CTSN
#I2S
himm 0x120F0130 0x1; # 0: GPIO11_0 1: I2S0_BCLK_RX
himm 0x120F0134 0x1; # 0: GPIO11_1 1: I2S0_WS_RX
himm 0x120F0138 0x1; # 0: GPIO11_2 1: I2S0_SD_RX
himm 0x120F013C 0x1; # 0: GPIO11_3 1: I2S1_BCLK_RX
himm 0x120F0140 0x1; # 0: GPIO11_4 1: I2S1_WS_RX
himm 0x120F0144 0x1; # 0: GPIO11_5 1: I2S1_SD_RX
himm 0x120F01AC 0x1; # 0: GPIO11_6 1: I2S2_BCLK_RX
himm 0x120F01B0 0x1; # 0: GPIO11_7 1: I2S2_WS_RX
himm 0x120F01B4 0x1; # 0: GPIO12_0 1: I2S2_SD_RX
himm 0x120F01B8 0x1; # 0: GPIO12_3 1: I2S2_SD_TX 2:SLAVE_MODE
himm 0x120F01BC 0x1; # 0: GPIO12_4 1: I2S2_MCLK 2:BOOT_SEL1
himm 0x120F0198 0x1; # 0: GPIO12_5 1: I2S3_BCLK_TX
himm 0x120F019C 0x1; # 0: GPIO12_6 1: I2S3_WS_TX
himm 0x120F01A0 0x1; # 0: GPIO12_7 1: I2S3_SD_TX 2:PCIE_REFCLK_SEL
echo "run $0 end!!!";
```
通過這個配置檔案,我們可以看到是用himm來配置引腳屬性的,這是海思的一款工具。而且可以看到SPI有兩個管腳的功能被複用成了I2C了,所以我們需要重新配置管腳的功能。那怎麼修改呢?本文章也是會使用himm工具來配置,接下來講解下himm工具的使用。
## 3.1 海思himm工具配置管腳
海思提供的himm工具,能在linux命令列中,直接對gpio進行操作。此工具可以在已經編譯好的SDK中 osdrv/tools/board/reg-tools-1.0.0/bin 這個目錄下可以看到。
我們看一看himm工具的本質,ls -al
```cpp
-rwxr-xr-x 1 root root 45540 Nov 20 23:57 btools
lrwxrwxrwx 1 root root 6 Nov 20 23:57 himm -> btools
```
可以看到himm工具其實就是btools可執行檔案,因此如果板子上沒有這個工具,則我們只需要將btools放到板子上,並且建立連結,做好之後就可以使用了。
himm執行的格式:
```cpp
himm 暫存器地址 需要設定的值
```
那現在我們就用himm來配置SPI管腳,通過第二章,我們都知道SPI相關的暫存器地址和相關的功能了。現在我將管腳配置成SPI功能、使用片選0管腳並且低電平有效,對應暫存器的地址和值如下:
| 暫存器 | 暫存器地址 | value |
| --- | --- | --- |
| SPI_SCLK管腳複用暫存器 | 0x120F0148 | 0x1 |
| SPI_SDO管腳複用暫存器 | 0x120F014C | 0x1 |
| SPI_SDI管腳複用暫存器 | 0x120F0150 | 0x1 |
| 片選CS外設功能選擇暫存器2 | 0x12120014 | 0x0 |
使用的配置指令如下:
```cpp
himm 0x120F0148 0x1; # 0: GPI13_0 01: SPI_SCLK 2:I2C1_SCL
himm 0x120F014C 0x1; # 0: TEST_CLK 01: SPI_SDO 2:I2C1_SDA
himm 0x120F0150 0x1; # 0: TEST_CLK 01: SPI_SDO 2:I2C1_SDA
himm 0x12120014 0x0;
```
以上的指令可以直接在板子上終端輸入,但是這是一次性的設定,重啟之後配置就不在了,如下圖:

為了每次啟動都有效,我們可以把以上的配置指令新增到上面提及到的mpp/ko/pinmux_vicap_i2c_i2s.sh腳本里面,然後編譯根檔案系統到板子上即可,也可以直接在板子上修改這個指令碼:/nand/ko/pinmux_vicap_i2c_i2s.sh,如下圖:

# 四、使用者態APP使用SPI
我們配好了SPI管腳,那麼在上層應用app怎麼使用這個SPI功能呢?既然這個晶片有這個SPI的硬體功能,那麼一般來說都會有直接使用它的軟體介面。該SPI的使用指南就在 **01.software\board\document_cn\外圍裝置驅動 操作指南.pdf** 這個文件裡,我們跳到 5.SPI操作指南 的章節閱讀,你就知道怎麼操作啦。
看到 **5.3.1 SPI讀寫命令示例** 這裡的時候,我們可以看到上面說的四個片選管腳並不是一個SPI控制器來控制的,Hi3531A的SPI控制器0有1個片選、控制器1有3個片選,我們在到開發板看一看 ls /dev/ 是不是有兩個SPI的驅動,一個是spidev0.0,另外一個是spidev0.1。也就是說,如果你使用spidev0.0的驅動節點,那麼就只能使用片選0;如果是使用spidev0.1,則可以選擇片選1-3。所以在配置片選的時候,要注意這一點。
## 4.1 示例
下面示例是使用者態的SPI讀寫程式(也可以參考 外圍裝置驅動 操作指南.pdf 文件的示例),隔500ms傳送一次1-9的資料:
```cpp
#include
#include
#include
#include
#include
#include
#include
#include
#include
unsigned char isExit = 0;
unsigned char mode = 0;
unsigned char bits = 8;
unsigned int speed = 9*1000*1000;
unsigned short delay = 0;
unsigned char cs_change = 1;
static unsigned int m_spi_write(int fd, int len, unsigned char* sbuf, unsigned char* rbuf);
void interrupt(int sig)
{
isExit = 1;
}
static unsigned int m_spi_write(int fd, int len, unsigned char* sbuf, unsigned char* rbuf)
{
int ret;
struct spi_ioc_transfer tr;
tr.tx_buf = (unsigned long)sbuf;
tr.rx_buf = (unsigned long)rbuf;
tr.len = len;
tr.delay_usecs = delay;
tr.speed_hz = speed;
tr.bits_per_word = bits;
tr.cs_change = cs_change;
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if(ret < 1){
printf("spi_write error\n");
return -1;
}
return tr.len;
}
int spi_init(unsigned char *arg)
{
int fd = 0;
int ret = 0;
unsigned int reg_value = 0;
fd = open(arg, O_RDWR);
if (fd<0)
{
printf("Open /dev/spidev0.0 dev error!\n");
return -1;
}
printf("Open /dev/spidev0.0 dev success!\n");
ret = ioctl(fd, SPI_IOC_WR_MODE, &mode);
if(ret == -1){
printf("set spi WR mode error\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_MODE, &mode);
if(ret == -1){
printf("set spi RD mode error\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if(ret == -1){
printf("set spi write bits per word error\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if(ret == -1){
printf("set spi read bits per word error\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if(ret == -1){
printf("set spi write Max speed error\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if(ret == -1){
printf("set spi write Max speed error\n");
return -1;
}
printf("int spi success, mode:%d, bits:%d, speed:%d MHz\n", mode, bits, speed/1000000);
return fd;
}
int main(int argc , char* argv[])
{
int i = 0, fd = -1;
unsigned int rsize = 0;;
unsigned char sbuf[1024] = {1,2,3,4,5,6,7,8,9};
unsigned char rbuf[1024] = {0};
if(argc != 2){
printf("pls input ./hisi2mcu /dev/spidev0.0 or /dev/spidev0.1");
return -1;
}
signal(SIGINT, interrupt);
signal(SIGTERM, interrupt);
fd = spi_init((unsigned char *)argv[1]);
if(fd < 0){
printf("spi_init error\n");
return -1;
}
while(1)
{
if(isExit == 1)
break;
memset(rbuf, 0, sizeof(rbuf));
rsize = m_spi_write(fd, strlen(sbuf), sbuf, rbuf);
printf("hisi recv szie = %d\n", rsize);
if(rsize == 0)
continue;
for(i=0; i