
Learn OpenCV----旋轉矩陣轉尤拉角
技術標籤:Opencv線性代數matlabpython計算機視覺
旋轉矩陣轉尤拉角
概述
本篇部落格,主要給出如何將3x3的旋轉矩陣轉換成尤拉角的討論和程式碼。
什麼是旋轉矩陣和尤拉角呢?
尤拉角
我們應該知道,對於一個三維空間,我們可以建立一個三維座標軸,而這個三維座標軸由X軸,Y軸和Z軸組成。當三維物體進行旋轉時,可以看成該物體依次繞著這三個軸進行某種角度的旋轉,這些角度被稱為尤拉角。值得注意的是,在行業中,尤拉角饒軸旋轉的循序是Z-Y-X,因為這樣對應著yaw-pitch-roll。
yaw:偏航角,指物體繞著Z軸旋轉
pitch:俯仰角,指物體繞著Y軸旋轉
roll:滾轉角,指物體繞著X軸旋轉
尤拉角看起來比較簡單,但是它的一個重大缺點是會出現萬向鎖問題:在俯仰角為 ± 9 0 ° \pm90^° ±90°時,第一次旋轉與第三次旋轉將使用同一個軸,這使得系統丟失了一個自由度。
旋轉矩陣
旋轉矩陣的幾何意義也很明確,把一個三維空間點(x,y,z)看為一個三維向量[x,y,z],然後將該向量與一個矩陣相乘,得到一個變換後的三維向量。值得注意的一點是,如果你將三維空間點看成一個行向量,那旋轉矩陣是在乘號後邊,即VM。但是如果使用列向量表示,那旋轉矩陣是在乘號前邊,即M
將尤拉角轉為旋轉矩陣
考慮三維旋轉最簡單的方式是軸角形式。因為任何旋轉都可以由旋轉軸和描述旋轉量的角度來定義。
由上述的討論可知,每個軸都有其對應的旋轉矩陣。下面分別給出X軸,Y軸和Z軸的旋轉矩陣。
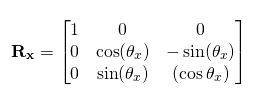
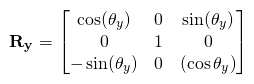
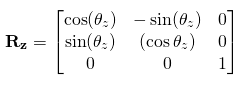
其中,
θ
x
,
θ
y
,
θ
z
\theta_x,\theta_y,\theta_z
θx,θy,θz對應為每個軸的旋轉角度,即尤拉角。
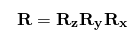
為了得到最後的旋轉矩陣
R
R
R,我們需要依次將物體在這些矩陣上進行連續運算,因此,最後的
R
R
R可以表示為如下的矩陣乘法。
從尤拉角轉換為旋轉矩陣的函式片段如下:
def 將旋轉矩陣轉為尤拉角
將旋轉矩陣轉換為尤拉角有點困難,因為在大多數情況下,解決方案不是唯一的。下面程式碼的輸出完全與Matlab的rotm2euler函式一致。
首先,先對旋轉矩陣進行檢查
# 檢查一個旋轉矩陣是否有效
def isRotationMatrix(R) :
# 得到該矩陣的轉置
Rt = np.transpose(R)
# 旋轉矩陣的一個性質是,相乘後為單位陣
shouldBeIdentity = np.dot(Rt, R)
# 構建一個三維單位陣
I = np.identity(3, dtype = R.dtype)
# 將單位陣和旋轉矩陣相乘後的值做差
n = np.linalg.norm(I - shouldBeIdentity)
# 如果小於一個極小值,則表示該矩陣為旋轉矩陣
return n < 1e-6
完整的轉換程式碼
# 這部分的程式碼輸出與Matlab裡邊的rotm2euler一致
def rotationMatrixToEulerAngles(R) :
# 斷言判斷是否為有效的旋轉矩陣
assert(isRotationMatrix(R))
sy = math.sqrt(R[0,0] * R[0,0] + R[1,0] * R[1,0])
singular = sy < 1e-6
if not singular :
x = math.atan2(R[2,1] , R[2,2])
y = math.atan2(-R[2,0], sy)
z = math.atan2(R[1,0], R[0,0])
else :
x = math.atan2(-R[1,2], R[1,1])
y = math.atan2(-R[2,0], sy)
z = 0
return np.array([z, y, x])
總結
三維旋轉是一個十分常見的需求,這些程式碼都可以直接使用,非常的nice。如果對完整程式碼有需求的小夥伴,可以去原網站下載,嫌麻煩,也可以下載我新增上註釋後的版本